绳-船模型的拓展研究
2016-10-25 02:26何述平
物理通报 2016年7期
何述平
(西北师范大学教育学院物理教育研究所 甘肃 兰州 730070)
绳-船模型的拓展研究
何述平
(西北师范大学教育学院物理教育研究所甘肃 兰州730070)
基于绳-船模型拓展性地探究了斜绳上点的速度、加速度,结果表明:斜绳上各点的速度、加速度的大小、方向均不同;深化了绳-船模型的运动学认识.
绳-船模型斜绳上点速度加速度拓展
1 引言
绳-船模型是典型的运动学问题:如图1,岸上一人用绕过定滑轮的不可伸长的轻绳以匀速率v0拉湖面上与绳相连的船靠岸,当绳与水平面成θ角时,求船的速度、加速度.从普通物理用直角坐标分量法可简便解决[1].因绳、船连动,则连接船的斜绳端点的速度、加速度与船的相同;那么,斜绳上点的速度、加速度如何?有怎样的特点?就此进行相应的探究,以期拓展、深化绳-船模型的运动学认识,并为教学奠定基础.
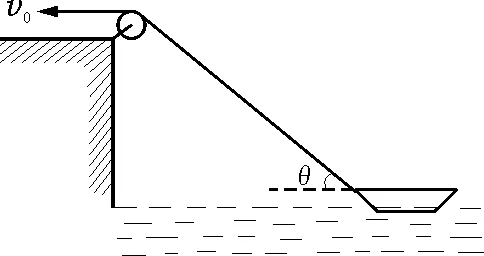
图1 绳-船模型
2 探究
基于绳-船模型,依次探究斜绳端点、斜绳上点的速度、加速度.
2.1斜绳端点的速度加速度
湖岸为参考系,斜绳与滑轮相切处为原点,建立平面直角坐标系O-xy,如图2;连接船的斜绳端点A为研究对象(视作质点),位置坐标为(xA,yA);取rA,θ为参量,则有
xA=rAcosθ
(1)
yA=rAsinθ
(2)
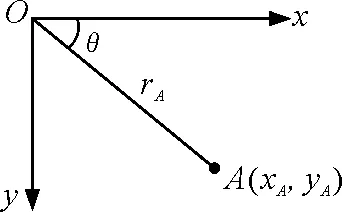
图2 点A的直角坐标
式中xA,rA,θ均是时间t的变量,而由题设知yA=c为恒量(因绳端A随船沿湖面水平向左运动);对t求导得
(3)
(4)
依题意:绳缩短,则有
(5)
由式(3)、(4)、(5)得
(6)
(7)
由式(6)、(7)得端点A的加速度[1]
(8)
式(6)、(8)中的负号表明:斜绳端点A的速度、加速度的方向均沿x轴反向.
2.2斜绳上点的速度加速度
有定性说明斜绳上各点的速度的大小、方向都不相同,但斜绳上各点的速度在绳上的投影都相同,等于拉绳的速度[1];而未能依据位移、速度概念细致推证,难免令人费解.鉴于此,先定性推证,再定量探究.
2.2.1斜绳上点的速度特点
斜绳与滑轮相切处O为参考点(惯性系),经时间Δt,船沿湖面由A点运动到B点,斜绳上一点P相应由P点运动到M点,位移矢量为Δr,取ON=OM,则点P的位移矢量三角形为ΔPNM,如图3(a);Δt足够短或趋于零时,分位移Δr2垂直于分位移Δr1(Δr可等效为相对于参考点O的位置矢量r[图3(a)中未画出]的大小变化即分位移Δr1和方向变化即分位移Δr2).因此,点P的运动自然是沿绳的分运动、垂直绳的分运动的合运动;即点P的速度vP是沿绳的分速度v1,垂直绳的分速度v2的合速度,如图3(b);但点P的速度方向不再沿水平向左.从而定性推知:斜绳上各点的速度的大小、方向都不相同,但斜绳上各点的速度在绳上的投影都相同,等于拉绳的速度.
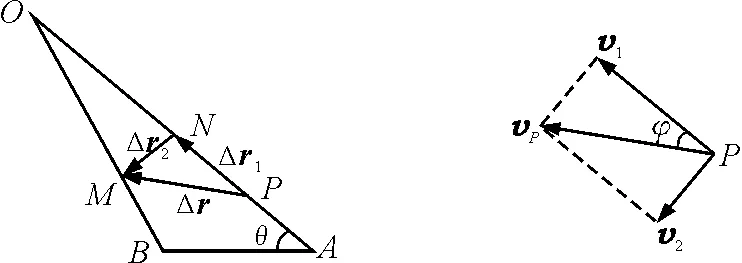
(a)点P的位移矢量 (b)点P的速度矢量
2.2.2直角坐标系下斜绳上点的速度、加速度
(1)直角坐标系下斜绳上点的速度
参考系、直角坐标系见图2,斜绳上一点P为研究对象(视作质点),位置坐标为(xP,yP),点P与斜绳端点A共线,则有约束方程
xP=rPcosθ
(9)
yP=rPsinθ
(10)
式中xP,yP,rP,θ均是时间t的变量,求导得
(11)
(12)
式中P是斜绳上的点,且绳缩短,则有
(13)
由式(11)~(13)和式(7)得
(14)
(15)
即P点的速度为
(16)
于是有
(17)
(18)
式(18)的结果同端点A的式(6).由式(16)得vP的大小、与水平面夹角
(19)
(20)
式(19)、(20)表明:vP,α均是rP的函数,即斜绳上各点的速度的大小、方向均不同;进而得(由题设知:
(21)
(22)
(2)直角坐标系下斜绳上点的加速度
由式(16)及式(5)、(7)、(13)得P点的加速度
(23)
于是有
(24)
(25)
式(25)的结果同端点A的式(8).由式(23)得aP的大小、与水平面夹角正切
(26)
(27)
式(26)、(27)表明:aP,tanβ均是rP的函数,即斜绳上各点的加速度的大小、方向均不同;进而得
(28)
(29)
令式(28)等于零,得
(30)
(31)
2.2.3极坐标系下斜绳上点的速度、加速度
(1)极坐标系下斜绳上点的速度
(32)
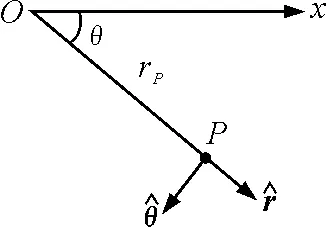
图4 点P的极坐标
则P点的速度为
(33)
由旋转矢量导数[2]、式(7)得
(34)
(35)
由式(33)、(13)、(34)得
(36)
式(36)表明:P点的速度vP是沿绳收缩的分速度
(2)极坐标系下斜绳上点的加速度
由式(36)、(34)、(35)、(5)、(7)、(13)得P点的加速度
(37)
于是有
(38)
(39)
由式(37)得aP的大小同式(26),与斜绳夹角正切
(40)
式(26)、(40)表明:aP,tanφ均是rP的函数,即斜绳上各点的加速度的大小、方向均不同;由式(37)、(30)得极小值时加速度
(41)
3 讨论

就物理学方法而言,直角坐标参量法涉及导数、矢量表示等方法;极坐标法涉及导数、矢量表示、单位矢量导数、矢量叉乘等方法.
4 结语
基于绳-船模型拓展性地探究了斜绳上点的速度、加速度,给出了定量表达式,并界定了取值;讨论了直角坐标参量法、极坐标法的特点;深化了绳-船模型的运动学认识,为教学奠定了基础.呈现了拓展普通物理运动学基本问题的一个实例.从基本问题到拓展问题,反映了提出问题能力;而提出问题能力的培养是教学目标之一;因此,依据教学实际适度让学生拓展适宜的基本问题,应是培养其提出问题能力的有效教学策略.
1胡盘新,孙迺疆.普通物理学(第5版)习题分析与解答.北京:高等教育出版社,2003.9~10
2Kleppner D,Kolenkow R J.力学引论.宁远源,等译.北京:人民教育出版社,1980.33~35,43
Extending Research on Rope-boat Model
He Shuping
(Research Institute of Physics Education,College of Education,Northwest Normal University,Lanzhou,Gansu730070)
Based on the model of rope-boat,the velocity and acceleration of a point of slanting rope are extensively explored,the results show that the size and direction of velocity and acceleration of each point of slanting rope are different;recognizing of kinematics of the model of rope-boat is deepened.
rope-boat model;point of slanting rope;velocity;acceleration;extending
2016-03-17)
猜你喜欢
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
数学物理学报(2022年2期)2022-04-26
中学生数理化·七年级数学人教版(2021年4期)2021-07-22
河北省科学院学报(2020年1期)2020-05-25
中学生数理化·教与学(2019年8期)2019-09-18
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27