
一种折弯机快速换模系统设计
2016-11-03 06:37马术文杨欣雨
组合机床与自动化加工技术 2016年9期
蔡 成,马术文,庞 敏,杨欣雨
(西南交通大学 机械工程学院,成都 610031)
一种折弯机快速换模系统设计
蔡成,马术文,庞敏,杨欣雨
(西南交通大学 机械工程学院,成都610031)
为有效解决当前折弯模具在换模过程中存在的费时、费力、操作危险等问题,对折弯生产过程进行了研究,设计了一套折弯模具快速换模系统。将换模系统按功能需求划分为通用垫铁、驱动系统、上模辅助支撑装置以及快速对准等模块。对各个模块进行详细设计,形成折弯机快速换模系统整体设计方案。系统能够有效提高折弯生产中折弯模具更换过程的自动化程度,在提升换模操作安全性的同时提高换模效率,系统对其他相关设备的研发也具有参考意义。
折弯模;快速换模;自动化
CAI Cheng, MA Shu-wen, PANG Min,YANG Xin-yu
(School of Mechanical Engineering,Southwest Jiaotong University,Chengdu 610031,China)
0 引言
折弯加工是金属板料在折弯机上,通过上模和下模之间的压力获得具有一定夹角或圆弧的工件的塑性成形加工方法。折弯加工广泛应用于航空航天、汽车和船舶工业等领域,是一种重要的钣金加工方法。某公司专业厂生产的折弯件基本属于单件、小批量、多品种生产,由于产品经常发生变化,在实际生产过程中,折弯模具需要不断更换。
国内外针对于大型模具吊装换模问题进行了一些研究,文献[1]设计了一种用于大型模具更换的液压气动举升装置。文献[2]设计了一种具有高精度定位的快速换模装置。国外研究中,文献[3]开发了一套伺服驱动的工件输送装置。但是,目前的研究存在机床设备改造风险性大,对现场生产具有一定影响,改造成本过高等问题。本文通过对折弯机换模过程进行研究,了解现场工作环境,结合现有设备和条件,针对于目前国内外研究存在的问题及现场需求,设计了一套折弯机快速换模系统。系统可以有效提高换模操作的可靠性和安全性,合理提高换模系统自动化程度。
1 快速换模系统总体结构
目前,现场广泛采用人工更换模具的方法,不仅费时、费力而且换模过程中存在巨大的安全隐患。钣金生产车间噪音嘈杂,导致地面换模人员和天车操作人员之间无法直接交流。折弯机上滑块遮挡模具吊装操作,由天车吊装的模具无法直接安放在折弯机工作台上,需要借助放置于工作台前的装模架支撑模具再将模具送入工作台。生产过程中重量较大的模具需借助天车绕过折弯机上滑块从机床后侧将模具拉入工作台。即使模具基本正确地安放于工作台,仍需要人工调整模具的位置,将模具上模和折弯机上滑块对准,才能进行装模操作。
通过对现有换模过程进行详细调研并对现场所使用的折弯模特点进行归纳,将换模系统分解为四个基本功能需求:①折弯模在折弯机工作台上前后移动。折弯模需要在工作台上前后移动,保证模具能够到达机床工作台上的正确位置并且模具能够退出工作台便于天车吊运模具。②支撑并固定折弯模上模。针对现场使用的没有导板的模具,由于上模位置不固定且发生偏倒,需要设计上模支撑装置使上模固定于折弯模上并具有正确的位置。 ③折弯模在工作台上前后偏转。折弯模前后偏转运动使上模基准面和上滑块基准面平行。④辅助换模人员判定模具上模和折弯机上滑块对准情况。上模和上滑块对准过程中,需要设计装置以辅助换模人员快速、准确地判定模具是否调整到位。

1.上滑块 2.工作台 3.通用垫铁 4.折弯模 5.驱动系统 6.上模支撑
综上所述,在经过详细调研和查阅相关设计资料的基础上将模具快换系统划分为通用垫铁模块、支撑装置模块、驱动系统模块、上模辅助支撑模块和快速对准模块。系统整体设计方案如图1所示。支撑装置采用框架结构,模具放置于通用垫铁上,跟随垫铁移动。左右两个驱动系统分别安装在两个支撑装置中,通过步进电机各自独立带动通用垫铁运动,实现模具前后移动和偏转运动。针对没有导板的模具设计上模辅助支撑装置,找正并固定上模位置。换模过程中,引入快速对准装置辅助换模人员快速、准确地判定模具是否调整到位。系统具有可靠性好、充分利用现有设备条件等优点。
2 快速换模系统详细设计
2.1通用垫铁模块设计
折弯加工中使用的垫铁一般是条状钢铁件,放置在机床工作台上支撑模具。普通垫铁的主要功能是调整模具闭合高度,适应上滑块的工作行程,增加模具和工作台的接触面积,减小加工过程对工作台的压应力。
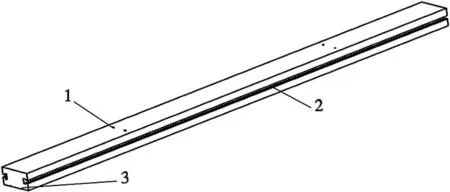
1.注油孔 2.T型槽 3.润滑槽
折弯机快速换模系统所设计的通用垫铁如图2所示,除具备普通垫铁功能外,还具有以下特点:
①通用垫铁的闭合高度、长度等设计参数具有普遍适用性。通过对现场所使用模具的规格参数进行归纳总结,通用垫铁的设计参数能够适应现场大多数常用模具的生产要求。
②模具放置于通用垫铁上如图1所示,模具的前后移动和偏转微调通过移动通用垫铁实现,减小换模系统对现有模具的影响。
③通用垫铁底面加工润滑槽如图2所示,降低垫铁与机床工作台及支撑架之间的摩擦力。
④通用垫铁上加工的T型槽与机床工作台原有的T型槽型号一致,确保现有生产设备能够在通用垫铁上使用。同时T型槽也是驱动系统、上模辅助支撑装置与通用垫铁连接的重要结构如图1中所示。
通用垫铁模块设计过程中,考虑将模具放置于垫铁上,通过移动垫铁实现折弯模运动。具有通用性好、充分利用现有设备和条件等优点。
2.2驱动系统设计
折弯机快速换模系统需要实现模具在工作台上前后移动和偏转运动。驱动系统每次工作需要经历启动-正向运动-微调-反向运动-停止的工作过程。考虑到步进电机可以通过脉冲驱动控制方式实现正反转运动,本文选用步进电机驱动方式,通过PLC和配套的步进电机驱动器实现运动过程控制。
考虑到驱动系统工作过程中,推动模具前后移动的距离并不长,滚珠丝杠传动具有摩擦系数小、传动效率高、使用寿命长等特点,综合以上因素选用滚珠丝杠传动机构。一般情况下,丝杠和电机可以采用直接连接方式。设计过程中,由于机构在垂直于工作台方向上具有尺寸限制,考虑将电机布置在丝杠螺母副下方可以节省空间,减小对生产现场的影响,电机和丝杠间采用等比同步带传动,由电机带动同步带,同步带输出端和丝杠输入端通过联轴器连接。折弯模具更换过程中,驱动系统带动垫铁和模具移动。左右两个驱动系统分别独立运动从而可以调整垫铁和模具中心线的位置,实现模具在工作台上前后运动和偏转运动。

1.上模辅助支撑 2.T型螺栓 3.同步带轮 4.同步齿形带 5.联轴器
驱动系统与垫铁连接形式如图3所示,通过放置于垫铁T型槽内的T型螺栓将垫铁和驱动系统相连,T型槽螺栓的头部加工为弧形,以适应垫铁在推拉过程中产生的转动。驱动系统正反转可以分别实现模具在该侧的前后移动。
两侧驱动系统独立工作,带动垫铁和模具运动。一侧驱动系统工作时,以另一侧驱动系统推动垫铁的作用点为坐标原点建立直角坐标系,该坐标系下摩擦力对坐标原点产生的力矩与驱动系统推力对坐标原点产生的力矩应相等。模具最大重量为6t并考虑一定的安全系数,当模具和通用垫铁总重量为10t时,驱动系统所需推力的计算公式为:
将设计参数带入计算公式得:

计算可得驱动系统所需推力为:F推=5068N。考虑电机加减速过程中模具和垫铁加速度为:
加减速过程中惯性力为:
F惯=ma=104kg×0.275m/s2=2750N
驱动系统所需克服总力为:
Fa=F推+F惯=5068N+2750N=7818N
考虑采用等比同步带传动,则步进电机工作过程中的负载力矩为:
式中:Fa—驱动系统所需克服总力;
I—丝杠导程;
η—丝杠螺母机构传动效率;
计算步进电机实际负载力矩时,由于加减速力矩和同步带传动摩擦力等因素的影响,应当考虑一定的安全系数K=2,确保步进电机正常工作:
T=2TL=2×13.1N·m=26.2N·m
电机转速计算结果为:
结合实际要求,根据步进电机矩频特性曲线选择保持转矩为30N·m,步距角为1.2°,型号为130BYGH350B的三相步进电机,根据步进电机型号选择3ND2283型步进电机驱动器可以满足使用要求。控制系统控制器需要四点输入,分别为正转启动按钮、反转启动按钮、停止按钮和故障信号采集。控制器输出点数为三点,分别为报警显示灯、脉冲输出(控制电机转动步数)、转动方向(控制电机转向)。根据系统要求选用SIMATIC S7-1200型PLC,该型PLC具有14个数字量输入点和10个数字量输出点,满足控制系统对PLC I/O点数的要求,控制信号地址分配如表1和表2所示。

表1 输入控制信号地址分配表

表2 输出控制信号地址分配表
驱动器采用单脉冲控制方式即利用脉冲和方向信号控制步进电机转动。脉冲数控制步进电机转动步数,方向信号控制电机转向。3ND2283型步进电机驱动器具有过压、短路以及过热保护等功能。系统发生故障时,驱动器FAULT端口和PLC信号采集端DI0.3接通,驱动器自动停止接收脉冲信号。同时,PLC控制报警灯工作,直至故障解除。驱动器恢复工作后,FAULT端口和信号采集端DI0.3断开,报警灯同时停止工作。步进电机驱动系统控制电路如图4所示。

图4 步进电机驱动系统电路图
2.3上模辅助支撑模块设计
折弯加工中使用的折弯模按是否具有导板可以分为两种类型。针对没有导板的模具,由于上模位置不固定且发生偏倒,需要设计上模辅助支撑装置使上模固定于折弯模上并具有正确的位置。
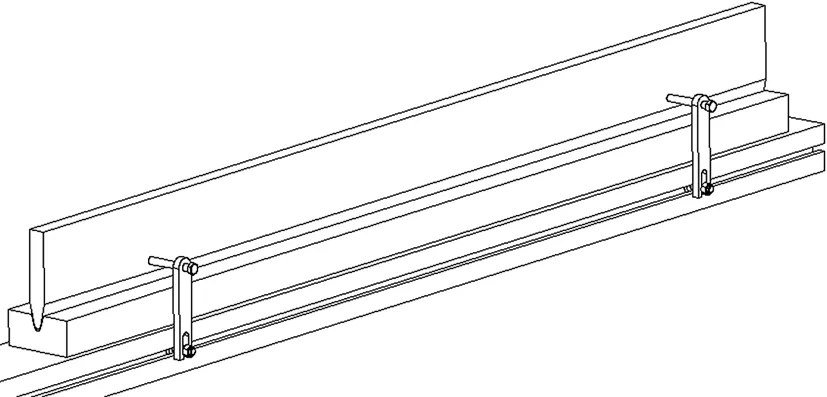
图5 上模辅助支撑简图
充分利用通用垫铁上的T型槽,设计如图5所示的上模支撑装置。在模具四周安装压板,压板上端攻螺纹,利用螺栓支撑上模。压板利用T型槽螺栓固定在垫铁上。实际使用过程中,通过调整螺栓位置找正上模。压板下端设计为图中所示形式,在使用过程中可以方便地拆卸,并且可以通过倾斜压板调整螺栓支撑上模的高度,以适应不同高度的折弯模。该上模辅助支撑模块具有操作方便、简单可靠、适应性强等特点。
2.4快速对准模块设计
折弯机换模过程中,需要在上模和上滑块对齐后才能进行装模操作。传统的人工换模过程,缺少对准装置辅助换模人员快速、准确地判定模具是否调整到位,加大了对准操作的难度。考虑便于现场换模人员使用、携带和保管的原则,应采用尽可能简便的方式实现对准功能的要求。在上模基准面上用磁力座安装两个带有电池的激光发射装置。通过激光发射装置找准折弯模位置,配合驱动系统实现模具快速、准确地定位。
2.5支撑装置设计
支撑装置需要承受模具和垫铁的总重量并且需要安装步进电机和滚珠丝杠等设备,因此支撑装置应具有足够的稳定性、刚度和良好的可维护性。设计过程中通过合理选择材料、合理设计结构,降低装置重量。考虑各种制造形式,采用冷拔无缝方形钢管焊接结构,能够保证支撑装置具有足够的强度和稳定性如图1所示。
3 结束语
本文首先分析了传统折弯加工换模过程中存在的问题,结合现场调研和查阅相关文献,设计了一套折弯机快速换模系统,该系统具有通用垫铁模块、支撑装置模块、驱动系统模块、上模辅助支撑模块和快速对准模块等5个模块。系统可以有效提高折弯加工换模过程的自动化程度,在提升换模操作安全性的同时提高换模效率。本系统对其他相关设备的研发也具有参考意义。
[1] 钱荣芳.气动液压模具举升装置设计[J].机械设计与制造,2005(4):111-112.
[2] 郭景丽,张建民.一种具有高定位精度的快速换模装置[A].华北六省区锻压技术文集(2012)[C].天津:天津科学技术出版社,2012.
[3] S Thiruvarudcheivan,N H Loh.Drawing of cylindricaland hemispherical cups using an improved tooling for friction-actuated blank holding[J].Mater Process Tech,UK,2008,(37):267-280.
[4] 史步海,方志雄.基于智能控制技术的电动折弯机研究与开发[J].组合机床与自动化加工技术,2011(7):72-75,79.
[5] 刘燕,刘志.大型板料加工自动送料控制系统的设计与改进[J].组合机床与自动化加工技术,2010(11):78-79,89.
[6] 朱承华,雷党辉,薛盛智.全自动模具更换系统在大型冲压线上的应用[J].制造技术与机床,2010(3):151-153.
[7] 丁厚永,孙立琴,于晓鹏. 基于软PLC控制的单侧浮动式夹紧定位机构的设计[J]. 组合机床与自动化加工技术,2015(6):140-142.
[8] 崔延.采用PLC控制步进电机实现点位控制[J].组合机床与自动化加工技术,2009(4):61-63,66.
[9] 刘书,吴生富.E4S1200-MB压力机采用的快速换模技术[J]. 一重技术,1997(3):20-22,83.
[10] 刘春,侯波,戴良景. 钣金热成形高温模具自动拆装系统的设计原理[J].机械设计与制造,2013(5):241-243.
(编辑李秀敏)
Design of the Rapid Press Brake Tool Change System for Bending Machine
To effectively solve the current bending mold in the process of the mould problem such as time-consuming,laborious,operation risk,folded in half bending process are studied,design a set of bending die quick die change system.The system could be divided into general system according to the functional requirements of the mould shim,drive system,upper die auxiliary support device and rapid alignment and other modules.The next step is to finish the detailed design of each module.The system can effectively improve the degree of automation,reduce the risk and improve the efficiency of the press brake tool change process.
press brake tool; rapid; automation
1001-2265(2016)09-0017-03DOI:10.13462/j.cnki.mmtamt.2016.09.005
2015-09-21;
2015-10-16
蔡成(1991—),男,四川德阳人,西南交通大学硕士研究生,研究方向为机械制造及其自动化,(E-mail)caicheng1086@163.com。
TH122;TG65
A
猜你喜欢
汽车实用技术(2022年7期)2022-04-20
模具制造(2021年10期)2021-11-20
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
房地产导刊(2020年11期)2020-12-28
模具制造(2019年10期)2020-01-06
制造技术与机床(2019年11期)2019-12-04
铁道通信信号(2019年4期)2019-10-10
制造技术与机床(2019年7期)2019-07-22
