
北斗用户机自主完好性监测算法设计
2016-11-04 02:14王成宾王利杰
测绘科学与工程 2016年1期
王成宾,李 奎,乌 萌,王利杰
1.西安测绘研究所,陕西 西安,710054;2.地理信息工程国家重点实验室,陕西 西安,710054;3.西安航天天绘数据技术有限公司,陕西 西安,710100
北斗用户机自主完好性监测算法设计
王成宾1,2,李奎1,2,乌萌1,2,王利杰3
1.西安测绘研究所,陕西 西安,710054;2.地理信息工程国家重点实验室,陕西 西安,710054;3.西安航天天绘数据技术有限公司,陕西 西安,710100
针对北斗用户机研发过程中自主完好性监测的现实需要,阐述了自主完好性监测的基础理论,分析了现有技术成果的发展现状,结合应用开发实际需求,通过研究基于最小二乘残差的故障检测和识别方法,提出了一种改进的自主完好性监测算法。试验结果表明,该方法能够较好地完成较小伪距粗差的检测识别,具有一定的工程应用价值。
故障检测;最小二乘残差;自主完好性;北斗接收机
1 引 言
在卫星导航定位系统中,完好性是指当卫星发生故障或者服务误差超限,造成系统不再适用于导航定位时,应该具备及时向用户提供警告的能力[1]。通过监测完好性来提升导航定位服务的安全可靠性,否则,系统给定的精度指标置信度很差,虽然提供了高精度的定位服务,但实际上是没有多大用途的。因此,用户需要在获得一定导航定位精度的同时,确保精度的可靠性和可信性。
目前,卫星导航系统完好性监测主要分三个层次,即广域增强系统(Wide Area Augmentation System,WAAS)、局域增强系统(Local Area Augmentation System,LAAS)和接收机自主完好性监测(Receiver Autonomous Integrity Monitoring,RAIM)。RAIM由于是嵌入在接收机内部实现,无需外部设备辅助,成本低,使用灵活,应用较为广泛[2],是各类GNSS用户机开发所必不可少的核心要素。
本文针对北斗手持用户机研发过程中自主完好性实现的工程需求,设计了一种基于当前历元并参考前一历元观测数据的自主完好性检测方法,在不增加系统运行负担的同时,还能够较好地完成较小伪距粗差的检测识别。
2 相关研究工作
接收机自主完好性监测(RAIM)由R.M.Kalafus于1987年提出[3],其主体思想是利用接收机接收到的冗余观测数据进行一致性检测,通过一定的RAIM算法,进行故障判别。由于RAIM是在接收机内部实现,所以对各种原因(卫星故障、星历错误或多路径等影响导致的错误观测)导致的故障更为敏感,其理想状态是能够以较低的误报警概率和漏检概率来检测并剔除错误观测数据,从而保证导航的连续性。由于RAIM在接收机技术发展中的重要性,各国学者在不同层面开展了相关研究,并取得了一定的成果。
20世纪80年代中后期,随着RAIM概念的提出,不同学者从不同应用角度提出了各自的理论。1987年Y.Lee提出了伪距比较法,1988年B.W.Parkinson提出了最小二乘残差法,1988年M.A.Sturza提出了奇偶矢量法,这三种方法均是基于当前观测量的“快照(Snapshot)算法”[4]。有学者还利用不同方法证明了这三种方法是等效的[5](R.G.Brown,1992;R.Kelly,1996;刘慧琴,2007等)。这三种方法不需要考虑系统的前后状态,仅依靠当前的观测量来完成自主完好性监测。由于其实现简单,系统计算负担较小,因而广泛应用至今。
RAIM基础理论成熟之后,众多学者又将目光投向数据处理新方法在RAIM中的应用。孙国良(2006)[6]等在分析基于卡尔曼滤波的信息监测方法优缺点的基础上,结合快照算法,提出了联合时域处理和集合统计的接收机自主完备性监测算法,仿真实验表明,该方法不仅减少了对可视卫星数目的要求,而且提高了故障检测的效率。陈小平(2009)[7]提出了基于“滑动窗”和U-C算法的参数实时更新的接收机钟差预测模型,不仅改善了钟差预测的精度,而且提高了故障检测和识别的效率。王尔申(2009)[8]将马尔可夫蒙特卡罗方法与标准的粒子滤波算法有机结合应用于接收机自主完好性监测中,利用状态观测概率密度似然比建立一致性检验统计量进行卫星故障的检测与隔离。代长勇(2010)[9]针对多系统卫星导航接收机自主完好性监测的现实需要,在传统的奇偶矢量法的基础上提出一种新的基于加权奇偶矢量法的自主完好性监测算法。刘海颖(2010)[10]针对卫星导航/捷联惯导组合导航系统的完好性检测,给出了一种扩展接收机自主完好性检测方法,将单独用于卫星导航系统的接收机自主完好性检测方法扩展到组合导航系统中,提高了组合导航系统的完好性检测性能。
3 RAIM算法实现
3.1最小二乘残差法的基本原理
北斗手持接收机定位解算的伪距观测量线性模型可表示为:
Z=HX+ε
(1)
其中,X是4×1维未知矢量,包括三位位置和接收机种差;Z是由对应n颗卫星的伪距观测量组成的n×1维矢量;H为n×4维观测矩阵;ε为n×1维测量噪声矢量。
根据经典最小二乘原理,用户位置的最小二乘解为:
(2)
其中,W为根据需要而设定的观测权阵,通过解算进而得到伪距残差向量为:
v=Qv·W·Z
(3)
Qv=W-1-H·(HT·W·H)-1·HT
(4)
其中,Qv为伪距残差向量的协因数阵。
3.2基于残差平方和的改进故障检测
伪距残差可直观反映卫星测距信息的情况,根据伪距残差向量获取其验后单位权中误差为:
(5)


依据设备应用所需达到的误警概率指标PFA,有以下概率公式:
(6)

但是在实际工程应用中发现,应用以上算法实现的接收机自主完好性监测,当观测伪距中含有较大粗差时,检测的概率较高,可以满足接收机的研制要求,但是,当观测伪距中粗差较小时,特别是接近伪距粗差检测下限时,其漏警率较高,难以满足测试要求。
本文通过前一历元观测量的伪距残差,引入二段函数自适应因子[12],通过设备的实际工作情况,进行检测门限的自适应调节,其原理如下:
(7)

对于接收机RAIM算法中的可用性判断[3-5],已有的最大精度因子变化方法(δhmax)、近似径向保护限差法(ARP)和水平/垂直保护法(XPL)等,均可满足实际使用需求,本文就不再阐述了。
4 实验分析
为了便于分析改进的RAIM算法对粗差的探测效果,对北斗信号模拟源按照表1所示参数进行仿真,通过自行开发的北斗手持接收机进行无线接收,记录测试过程中接收机获取的所有原始观测量。
表1模拟测试环境参数

环境参数场景参数指标测试方式无线模拟场景时间2小时最大速度300m/s最大加速度40m/s2最大加加速度2m/s3
在近7000个观测历元数据中,随机添加500个伪距测量粗差,其中发生故障卫星编号、发生历元时间,均按照随机方式选取,贴合实际使用情况。粗差按照5m步长,从0递增到125m,然后利用基本最小二乘残差检测法和改进后的方法分别进行处理,统计故障检测报警情况,其实验结果如图1所示。从图中可以明显看出,改进的RAIM算法在针对较小伪距偏差有较为理想的检测率。
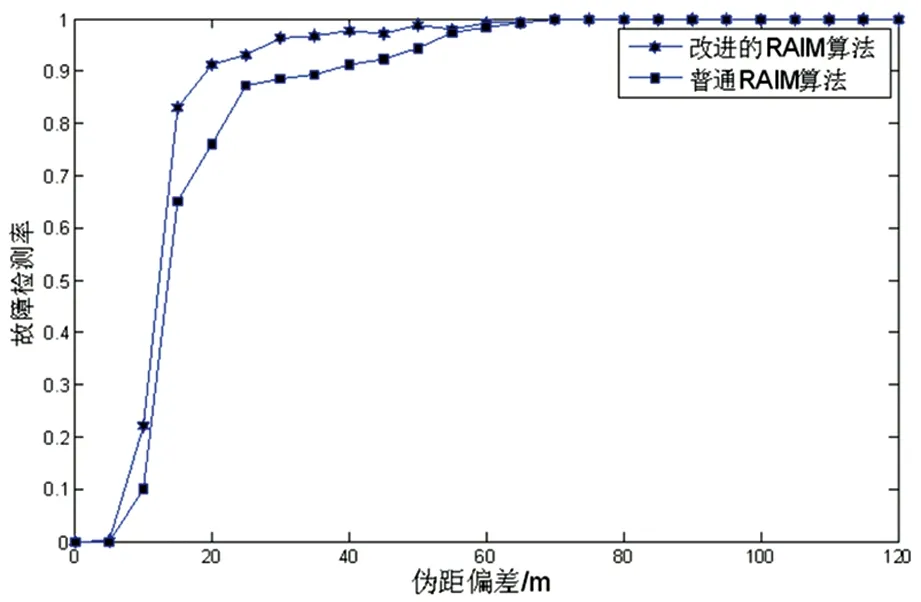
图1 RAIM故障检测率曲线
5 结 论
本文介绍了接收机自主完好性的相关技术及研究现状,通过研究基于最小二乘残差的故障检测和识别方法,引入二段函数自适应因子,提出了一种改进的自主完好性监测算法。该方法能够有效利用前一历元观测信息,提升较小伪距粗差的检测效率,对北斗手持接收机的研发具有一定的工程应用价值。
[1]吕小平. 发展我国的GNSS完好性监测系统[J]. 空中交通管理,2004(3):6-10.
[2]Safety Regulation Group. GPS Integrity and Potential Impact on Aviation Safety[R]. CAA THESIS,2003.
[3]陈金平. GPS完善性增强研究[D]. 郑州:信息工程大学,2001.
[4]孙晓剑. GNSS完备性监测RAIM算法研究[D].长沙:中南大学,2012.
[5]吴云. GNSS接收机自主完备性监测算法研究[D].武汉:武汉大学,2009.[6]孙国良,孙明菡,陈金平. 时-集综合的接收机自主完好性检测方法研究[J]. 航空学报,2006,27(6):1171-1174.[7]陈小平,腾云龙,徐红兵. 接收机时钟辅助RAIM算法研究[J]. 宇航学报,2009,30(1):271-274.
[8]王尔申,张淑芳,胡青. 基于MCMC粒子滤波的GPS接收机自主完好性检测算法研究[J]. 仪器仪表学报,2009,30(10):2208-2210.
[9]代长勇,常青,陈媛. 多系统卫星导航接收机自主完好性监测[J]. 遥测遥控,2010,31(6):11-14.
[10]刘海颖,叶伟松,王惠南. 基于ERAIM的惯性辅助卫星导航系统完好性检测[J].中国惯性技术学报,2010,18(6):686-689.
[11]陈小平,腾云龙. 接收机自主完好性监测算法研究[J]. 电子科技大学学报,2008,37(2):218-220.
[12]杨元喜. 自适应动态导航定位[M]. 北京:测绘出版社,2006.
RAIM Algorithm Design of BeiDou Receiver
Wang Chengbin1,2,Li Kui1,2,Wu Meng1,2,Wang Lijie3
1. X’an Research Institute of Surveying and Mapping, Xi’an 710054, China 2. State Key Laboratory of Geo-information Engineering, Xi’an 710054, China 3. Xi’an Aerorspace Remote Sensing Data Technology Co.Ltd., Xi’an 710010, China
In order to satisfy the application requirement of receiver autonomous integrity monitoring (RAIM) in BeiDou receiver development, the basic theory of autonomous integrity monitoring is introduced, and the technology development status is analyzed. Combined with the manufacture requirements, fault detection and identification based on least squares residuals is studied and an improved RAIM algorithm that can detect the small pseudo range is presented in this paper. The experiment results indicate that this algorithm is effective in detection and recognition of smaller pseudo range gross error and can be applied in engineering field.
fault detection; least squares residual; receiver autonomous integrity; Beidou receiver
2015-09-14。
王成宾(1983—),男,工程师,主要从事惯性测量、卫星导航应用研究。
P207
A
猜你喜欢
地理空间信息(2022年10期)2022-10-31
网络安全与数据管理(2022年3期)2022-05-23
北京航空航天大学学报(2020年10期)2020-11-14
自动化学报(2019年6期)2019-07-23
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
测绘科学与工程(2017年3期)2017-08-16
测绘通报(2016年12期)2017-01-06
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
