罗兰C系统作为无人机海上导航备份的探讨*
2016-11-07 06:56刘文超王光辉刘海洋
舰船电子工程 2016年10期
刘文超 王光辉 刘海洋
(1.海军航空工程学院 烟台 264001)(2.92026部队 威海 264300)
罗兰C系统作为无人机海上导航备份的探讨*
刘文超1,2王光辉刘海洋
(1.海军航空工程学院烟台264001)(2.92026部队威海264300)
导航系统是无人机完成给定任务的必要条件之一。未来无人机对导航的可靠性和稳定性等性能提出更高的要求。通过分析介绍无人机导航方式多样性和罗兰C系统特点及作用范围,得出罗兰C作为无人机海上导航备份的必要性和可行性。说明增加导航因子,不再依赖于某一项或者某几项导航技术,拥有多技术结合和完全自主能力的导航是未来发展方向。
无人机; 罗兰C; 导航备份; 海上环境
Class NumberV249.328
1 引言
随着现代新设备、新技术的发展,特别是无人机具有体积小、重量轻、机动灵活、成本低、适应性强、没有人员伤亡等优点,无人机研究又重新提上日程,无人机的使用和发展也开始受到越来越多国家的重视。其中,美国、俄罗斯、以色列等国家走在无人机发展研究的前列,我国也在加紧这方面的研究[1]。
导航系统是无人机的“眼睛”,相当于有人机系统中的领航员。无人机导航系统的主要任务是确定无人机实时速度、位置、飞行姿态等相关信息,引导无人机按照规划航线飞行并完成任务,随着无人机系统技术的不断发展和应用的不断深入,对导航系统的要求将会越来越高[2]。高精度、高可靠性和
高抗干扰能力将是主要方向[3]。本文通过介绍分析无人机导航方式,在我国拥有完全自主能力下,提出罗兰C系统作为我国无人机海上导航备份的必要性和可行性。
2 无人机导航方式
2.1卫星导航
卫星导航系统由空中卫星、地面站台以及用户接受设备组成。能够全天候、全时间为全球用户提供时间、速度、位置等信息,且定位精度不会随时间的变化而变化。但是环境适应性较差,信号容易被干扰。现在应用最广泛的卫星导航系统就是美国的全球定位系统(GPS),战时很可能对美国以外的其他国家进行关闭。“北斗”系统是我国自主开发研制的卫星导航系统,主要用于定位、简短通信和精密授时三大功能,工作频段在L波段,其差分定位精度为20m,水平定位精度为100m,定位响应时间最短可小于1s,一次定位成功率达到95%,能够在GPS系统之外为军民导航提供另一个选择。
2.2惯性导航
惯性导航系统属于一种推算导航方式,即从已知点的位置根据连续测得的运载体航向角和速度推算出其下一点的位置。它是一种不向外辐射能量,也不依赖于外部信息的自主式导航系统,具有隐蔽性好,不受外界干扰,全天候工作等独特优点。能够实时给出速度、航向、位置等信息,但是不能提供时间信息,并且由于元器件本身的误差问题,定位精度会随着使用时间增长而增大,每次使用之前都需要长时间的初始对准。
2.3多普勒导航
多普勒导航是利用多普勒效应实现无线电导航,由导航计算机、机械仪表、多普勒雷达三部分组成。设置好初始数据后由计算机推算定位。系统的优点是反应快,抗干扰性强,无需地面设备,适用于各种地形和气象条件,缺点是工作时必须发射电波,隐蔽性不好;性能与飞机姿态和反射面的形状有关;系统会随着飞行距离的增加而有误差积累。
2.4无线电导航
无线电导航是把定位信号调制在发射机产生的无线电波上,通过天线辐射到空中,由飞行器上的接收机接收并解算出时间、位置等信息。对于中短程飞行器而言,无线电导航是一种非常成熟的技术,尤其是应用于山区战场侦察、地面攻击,或者是短程的海防、海岸侦察,可靠性高、不受时间限制。缺点是对外有辐射源,需要大功率的发射设备。
2.5地磁导航
地磁导航是通过地磁传感器测得的实时地磁数据与存储在计算机中的地磁基准图进行匹配来定位。具有无辐射、隐蔽性强、能耗低、不受干扰、全天候、全地域使用的特征,并且不存在积累误差;缺点是需要存储大量的地磁数据,强大的数据处理能力,导航精度容易受机载其他电磁设备的干扰。另外,受地形影响原因,适合起伏变化大的地形,且该导航方式要求提前规划航路严格按制定路线飞行,大大降低了飞行器的机动性。在国内外是一种新兴的技术,目前没有在无人机上应用。
2.6天文导航
天文导航是通过对天体位置测量来得出飞行器航向和位置的导航技术。根据天体的坐标位置和运动规律计算出用户的实际航向和位置。天文导航也不需要其他地面设备,是自主式导航系统。不受电磁波的影响,不向外辐射能量,隐蔽性好,定向、定位的精度比较高,定位误差与时间无关,适合高空长航时飞行导航。缺点是低空飞行时容易被能见度限制,受气象条件影响大,并且设备体积较大不适合小型无人机。
2.7地形匹配导航
地形匹配导航是事先通过摄影、大地测量和已有地形图等方法将地形数据制成数字化地图存储在计算机中,当无人机飞越相关区域时,机上的探测设备对该区域进行测量并与计算机中的数字化地形数据进行比较,从而实现对无人机的导航。特点是技术困难,对测量器材和计算机处理性能需求较高,要求地形有鲜明的特征,必须和其他导航方式组合使用[4~5]。
以上导航方式各有优缺点,尤其在复杂的海上环境和特殊政治条件下,我无人机可以选择的导航方式更是屈指可数,而未来无人机对导航的稳定性和可靠性等性能提出更高的要求,要增加导航方式的多样性,技术的自主性,不再依赖于某一项或者某几项导航技术。因此,拥有完全的自主能力和多种导航技术方式相结合是未来发展方向。
3 罗兰C系统简介
3.1罗兰C由来
罗兰C系统(long range navigation,Loran)是一种中远程精密无线电导航系统,它属于陆基、低频、脉冲相位导航体制。罗兰C系统是由美国在二战期间最先开发建设的,1957年由美国海岸警卫队建成了世界上第一个罗兰C台链。我国在20世纪60年代开始研究罗兰C技术,并于70年代决定建立我国的罗兰C系统,即长河二号系统。目前长河二号系统已经成为我国完全自主的无线电导航系统[6]。
3.2系统原理
导航中,把具有固定导航参数的点的轨迹线称为位置线。罗兰C系统的导航参数是用户相对于两导航台的距离差。位置线是以该两个地面导航台为焦点的双曲线族。一个距离差参数对应一条双曲线位置线。双曲线位置线的取得是在接收点测量来自两个地面台信号到达的时间差,根据电波传播速度的恒值性,把时间差转换为距离差。一个距离差对应于一条双曲线位置线,多条位置线的交点即为定位点[7](图1中P即为定位点)。
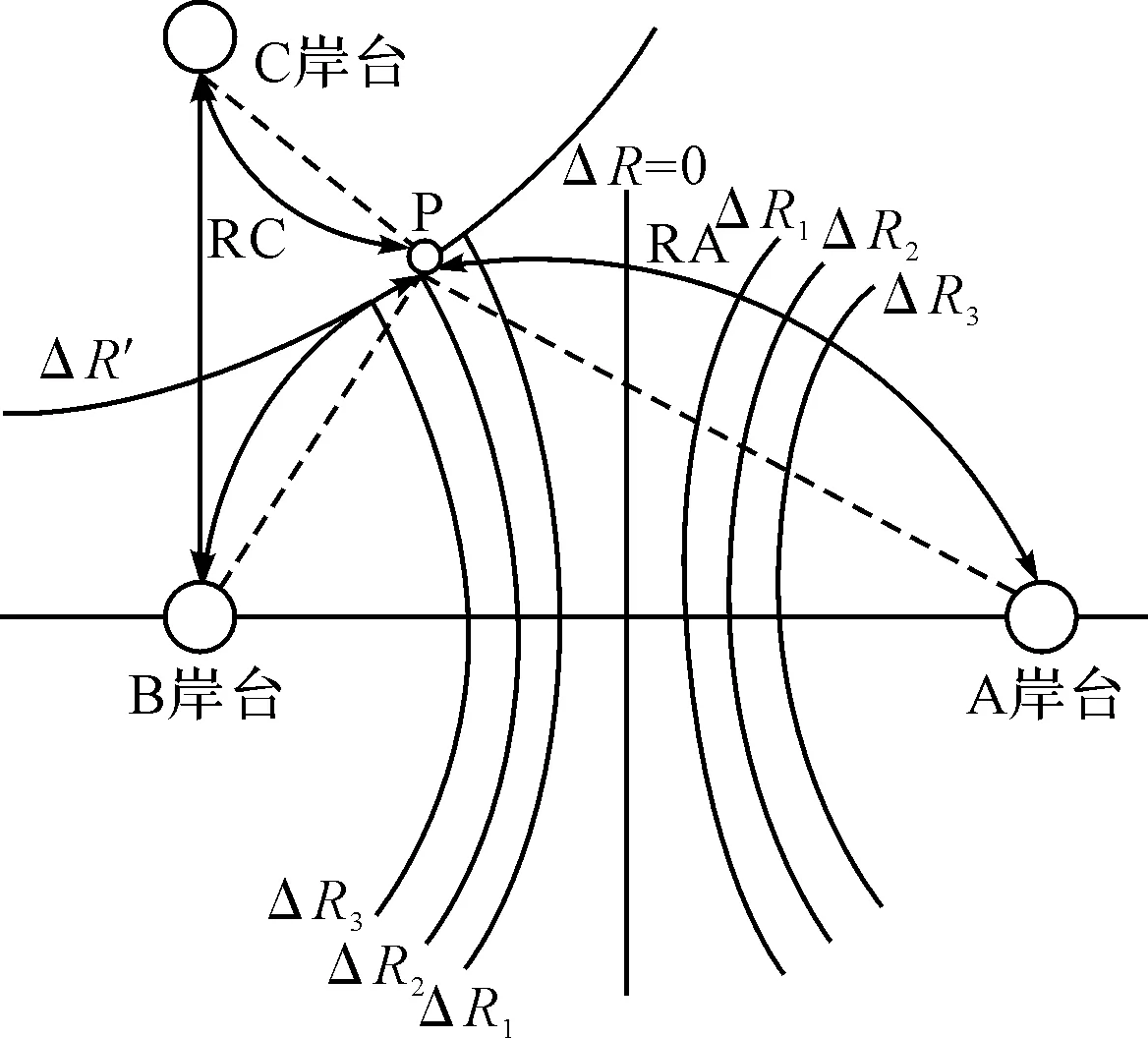
图1 双曲线导航定位原理图
3.3系统组成及覆盖范围
我国罗兰C(长河二号)系统共有六个地面发射台,三个系统监测站和三个台链控制中心。六个地面发射台相互链接,构成三个台链。该系统的台链配置和系统参数见表1[8]。
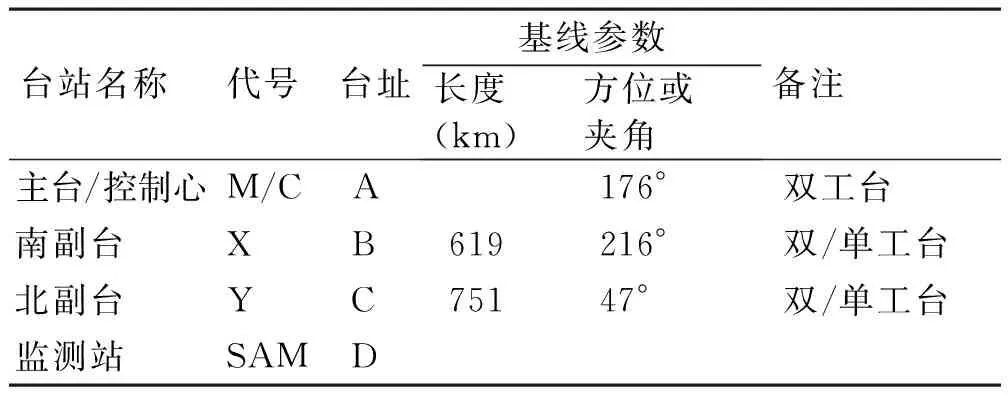
表1 XX台链配置
罗兰C系统海上最大作用距离可以达到2000km,陆地上最大作用距离可达800km~1200km。我国目前所拥有的罗兰C信号发射台可以覆盖我国南海海区,南沙群岛,印支半岛,菲律宾中北部地区,朝鲜半岛、小笠原群岛、日本列岛及日本海海区(罗兰C系统覆盖区为指定精度优于460m的区域)。基本可满足我国海军和其他有关部门对海上导航的要求。可以实现对我国领海和中、远海海区的导航控制,具有显著的军事和经济效益[9]。
我国长河二号系统台每一个台链包含一个主台、两个副台、一个监测站和一个控制中心[8]。为了便于管理,将台链控制中心与主台设在一起构成一个完整的系统发射无线导航信号,用于导航定位。台、站和控制中心之间用无线或有线方式进行通信。
4 罗兰C系统作为无人机海上导航
备份的探讨
4.1无人机导航拥有备份系统的必要性
目前无人机在飞行过程中主要依靠GPS和惯性导航作为基本导航方式。GPS的主要缺点是该技术由美国控制,它不允许未经批准的用户将其用于军事目的;而且美国一再强调,它将保留在任何时候不加警告的对GPS进行加密的权利,因而GPS可以利用但不能对其依赖,GPS只能算是一种半自主导航定位技术[10]。且GPS和我国北斗卫星导航,其最大的缺点就是信号容易受到干扰,尤其是在复杂电磁环境的海上条件下。
GPS在空间、控制、用户区段都可能遭受敌方干扰,尤其在用户区段抗干扰能力弱几乎成了致命伤,该弱点是GPS和其它卫星导航系统所共有的。GPS卫星只有几十瓦的发射功率,从太空到达地面的用户接收端要20220km的传播距离,根据电磁波传播理论知道,除了有能量扩散衰减外,还有传输介质吸收损耗,真正到达用户接收机的信号微乎其微,实验也证明:民用L1 C/A码信号的最低功率电平只有-160dBW,即使通过信号扩频的技术途径提高抗干扰能力,也只需要-125dBW的干扰强度就可以将GPS信号干扰掉。而干扰信号距接收机可能近得多,功率也大很多。
可以想象,在复杂海上电磁环境下,卫星导航会显得极为脆弱,并且一但GPS受到干扰,重新搜索卫星还将需一定的时间,不利于要求实时定位的无人机飞行。因此,绝对不能将GPS等卫星导航系统作为唯一的导航、定位、授时手段,一定要拥有能够实现主要功能替代的、可靠的其它模式的导航备份系统[11]。
惯性导航的缺点一是在长时间长航程使用中会有较大的误差积累,每次使用之前还需要长时间的初始对准;二其最主要的缺点是不能提供精准的时间信息。
4.2罗兰C作为无人机导航备份可行性
1) 从物理因素方面看,卫星/罗兰C组合导航系统,有三高三低优势互补的长处。这就是卫星导航定位信号与罗兰C信号有高频与低频优势互补、低信号电平与高信号电平优势互补、天基与地基优势互补。因此,两种系统由于相同的原因并且同时失效的可能性不大[12]。
2) 罗兰C系统是24小时不间断全向发射信号,每个罗兰C发射台的设备可确保单台信号可利用率在0.999之上。实际信号年时间可利用率在0.99左右。罗兰C信号发射具有很强的连续性,相比较卫星导航系统,不用搜星,在信号覆盖区域开机即可很快搜到信号,符合无人机实时快速定位的要求。
3) 罗兰C系统台站覆盖范围大,系统所采用的无线电信号主要是频段在90kHz~110kHz的地波信号,特点是稳定,不受太阳辐射和气候、时间等因素的影响。采用的固态大功率发射机,峰值发射功率可以达到2MW[8],可靠性高,抗干扰能力强,且罗兰C信号采用的编码格式和信号波段降低了其受干扰的可能性。此外,要想对罗兰C信号进行压制式干扰,对立方必须也建立相应的发射台,采用高功率、长天线实施干扰,战时完成这些任务难度相当高,不易实现。
4) 中国的罗兰C系统定位重复精度高,重复定位精度与相对定位精度可以达到18m~90m。其分布广泛的导航台站是我国宝贵的导航系统和信号资源。而且,发挥和挖掘罗兰C系统的应用潜力也是提高装备效费比的必然要求。
5) 罗兰C作为一个独立的陆基无线电导航系统,不依赖于其它系统,且新增加了授时功能。在我国PNT(导航、定位、授时)体系建设中具有不可替代的作用,可与星基授时系统共同构成较为完整的时空保障体系[13]。
5 结语
无人机对导航系统在高精度、高可靠性和高抗干扰能力方面的要求越来越高,迄今为止还没有一种单一的导航方式可以满足这种要求,因此,增加导航方式的多样性和自主性,将是我们现在和今后无人机研究的主要方向。本文通过分析介绍各种导航方式的优缺点,讨论得出罗兰C系统有条件成为我国无人机海上导航的备份和增强系统。这对无人机性能的提高乃至部队整体战斗力的提高都有着非常重要的意义。
[1] 林一平.我国高校无人机研发成果丰硕[J].交通与运输,2009(2):31-32.
[2] REG A.Unmanned Aircraft Systems:UAVS Design, Development and Deployment[M].2010:10-50.
[3] Ahlstrom K, T orin J. Future architecture of flight control systems[J].IEEE T rans on Aerospace and ElectronicSystems,2002,17(12):21-27.
[4] 顾云涛.无人机导航技术研究[J].现代导航,2013(3):198-200.
[5] 周建民,康永,刘蔚.无人机导航技术应用于发展趋势[J].中国电子科学研究院学报,2015(3):275-276.
[6] 李彬玉,王丰乐.长河二号系统在我国南海的定位误差分析[J].青岛大学学报,2003,16(4):53-54.
[7] 钱丽丽.罗兰C导航中定位解算技术的研究[D].西安:西安电子科技大学,2006:19.
[8] 曹永银,胡东亮,刘海泉.罗兰-C固态发射机[M].武汉:海军工程大学出版社,2004.
[9] 杜鸿.长河二号导航系统简介与发展趋势[J].科技资讯,2010,22(6):6-7.
[10] 郑成军.无人机的GPS自主导航系统[J].无人机,2007(3):40-41.
[11] 张戎,路明,龚涛.复杂电磁环境下罗兰C系统作为GPS备份的探讨[J].全球定位系统,2010(4):45-46.
[12] 黄辉,吉春生.双星/罗兰C组合导航方式研究[J].全球定位系统,2005(1):27-28.
[13] 汪捷,李川章,梁尔冰,等.增强罗兰技术分析及评估[J].舰船电子工程,2009,29(8):37-40.
Discussion on UAV Seaborne Navigation Backups of Loran-C System
LIU Wenchao1,2WANG GuanghuiLIU Haiyang
(1. Naval Aeronautical and Astronautical University, Yantai264001)(2. No. 92026 Troops of PLA, Weihai264300)
Navigation System is necessary for UAVs. In the future, a growing number demands for stability of UAVs will appear. After analyzing the diversity of UAV navigation method and the impact range of Loran-C System, it comes to conclusion that it is necessary and available to use UAV seaborne navigation backups with Loran-C System. Which needs navigation factors instead of some or more navigation techniques. Full autonomy ability and navigation which combines multiple techniques has become the trend.
UAV, Loran-C, navigation, backup, seaborne
2016年4月1日,
2016年5月26日
刘文超,男,硕士研究生,助理工程师,研究方向:无线电导航。
V249.328
10.3969/j.issn.1672-9730.2016.10.011
猜你喜欢
中国设备工程(2022年5期)2023-01-02
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
文苑(2020年10期)2020-11-07
网络安全和信息化(2020年1期)2020-01-15
电脑爱好者(2019年8期)2019-10-30
特别文摘(2017年13期)2017-11-11
百科探秘·航空航天(2016年9期)2016-12-01
太空探索(2016年10期)2016-07-10
课堂内外(小学版)(2015年6期)2015-09-10
太空探索(2015年5期)2015-07-12