基于相位校正的高重频脉冲多普勒雷达自卫干扰技术研究*
2016-11-07 06:56杨祎綪郑继刚
舰船电子工程 2016年10期
杨祎綪 郑继刚 安 涛
(中国船舶重工集团公司第七二三研究所 扬州 225001)
基于相位校正的高重频脉冲多普勒雷达自卫干扰技术研究*
杨祎綪郑继刚安涛
(中国船舶重工集团公司第七二三研究所扬州225001)
论文提出了一种基于相位校正的高重频脉冲多普勒雷达自卫干扰技术,在循环复制干扰基础上增加了相位校正功能来消除相位突变,得到高质量相参的干扰信号。阐述了基于相位校正的循环复制干扰原理和设计,并对其进行了硬件实现和性能测试,对无相位校正和有相位校正两种情况下产生的干扰信号进行了比对和分析。
高重频率; 循环复制; 相位校正; 相位突变
Class NumberTN95
1 引言
脉冲多普勒雷达是在动目标显示雷达的基础上发展而来,利用雷达与目标之间的相对运动产生的多普勒频率偏移在频域上滤出目标的多普勒频率谱线,使雷达在强杂波中分离和检测出目标信号,具有较高的距离分辨率和速度分辨率,同时可以有效地抑制杂波干扰[1]。
按照脉冲重复频率的大小,脉冲多普勒雷达的工作方式分为高PRF(30kHz~300kHz)、中PRF(10kHz~30kHz)和低PRF(小于10kHz)三种。高PRF的脉冲多普勒雷达采用足够高的PRF使所观测的目标没有速度模糊,但是其距离是模糊的。低PRF的脉冲多普勒雷达由于PRF低,使目标在距离上不模糊,但对速度较大的目标在运动速度上是模糊的。而中PRF的脉冲多普勒雷达介于两者之间,既有距离模糊又有速度模糊[2]。高PRF对下视情况下的迎头目标具有较优越的性能,低PRF在上视情况中性能良好,中PRF则可以在低空下视情况下对追尾目标提供满意的探测性能,因此,在实际的雷达设计中经常采用高、中PRF配合使用,并在上视时采用低PRF的方法[3]。
对高PRF脉冲多普勒雷达的干扰一直是电子战领域研究的热点,这种雷达的脉冲宽度在百ns量级,为了对其实施有效的自卫式干扰,干扰设备必须在很小的延时内发射干扰信号,并且干扰时间越长,干扰越有效[4]。全脉宽复制在接收完完整的脉冲信号后发射干扰信号,其优点是干扰信号的相参性好,干信比高,但是这种方式下模拟的目标回波与真实目标距离间隔大,不能起到自卫的作用。循环复制干扰技术只需接收雷达始段一小段信号后即可进行转发式欺骗干扰,不仅可以快速跟上目标回波,而且通过控制循环复制次数可以增加干扰时间。但是,循环复制后得到的干扰信号由于存在相位突变,造成了其频谱被展宽,干信比降低,并且失去了与雷达信号的相参性,最终影响干扰效果[5]。本文研究的技术解决了相位突变的问题,得到高质量的干扰信号。
2 基于相位校正的循环复制干扰原理
循环复制干扰的读写示意图如图1所示。干扰设备对接收到的雷达信号进行检波,以检波脉冲的上升沿作为存储雷达信号的开始标志,在存储完指定长度的数据之后,就可以控制读信号逻辑开始循环读取存储器内存储的数据[6]。不做相位校正时,每次读出的数据会直接送入DAC进行数字信号到模拟信号的转换。由于雷达信号的精确频率未知,截取信号的初始相位和终止相位不一定连续,这就造成了在每次重新读取该段数据时信号的相位会发生突变,使干扰信号与雷达信号不相参,并且在频率上发生偏移,频谱上展宽。而脉冲多普勒雷达是一种全相参体制的雷达,并且在接收信号时通过多普勒滤波器组滤除杂波信号得到信噪比高的目标回波信号,因此传统的循环复制干扰样式的干扰效果受这种相位突变的影响变得十分有限,对复制的信号进行相位校正从而消除相位突变就变得十分重要。
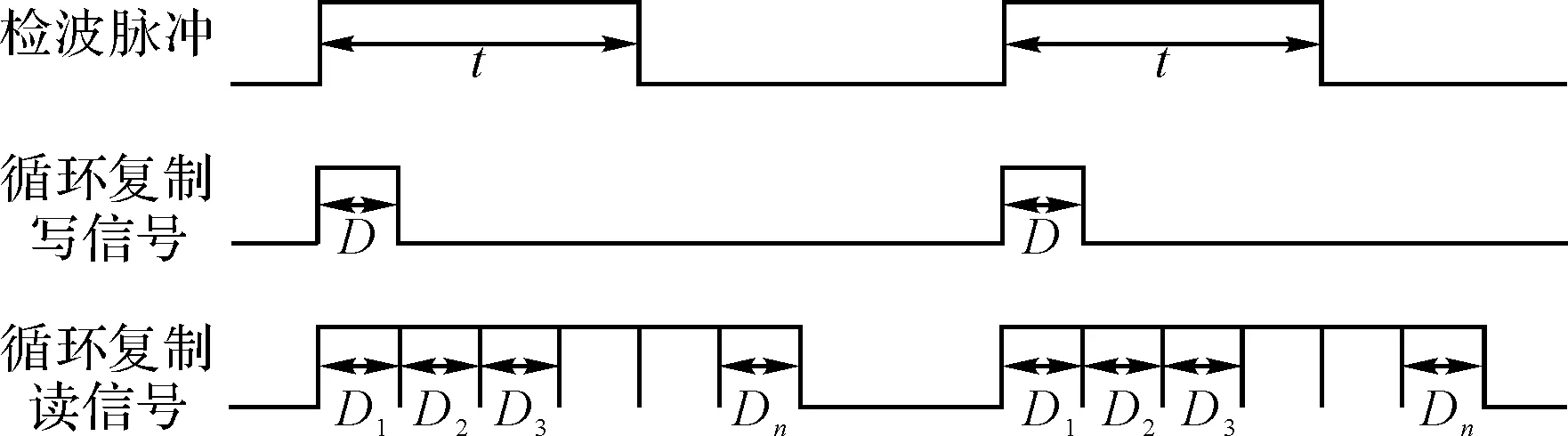
图1 循环复制干扰读写示意图
数字射频存储(DRFM)的量化方式主要包括幅度量化和相位量化[7]。幅度量化方式将模拟信号的幅度量化成离散的幅度电平进行存储和调制,这种方式得到的干扰信号信噪比高,但需要对存储的信号进行相位调制时就比较复杂;相位量化将模拟信号的相位量化成相位数据,进行存储和调制,这种方式可以方便地对干扰信号进行相位调制,但其输出的信噪比较低,实际应用中无法满足高质量信号重构的要求。为了得到高信噪比的干扰信号,基于相位校正的循环复制干扰在幅度量化的基础上加入幅相转换,将幅度数据转换成相位数据之后再进行相位校正。这种方式不仅简化了对幅度数据进行相位调制,还能得到高信噪比的干扰信号[8]。
对幅度数据进行幅相转换一般有两种方式,实时运算法和查表法。实时运算法采用cordic算法对幅度数据进行计算得到相位数据,其优点是使用的存储空间小,缺点是延时大;查表的方式依据幅度相位转换关系设计幅相转换表,转换时以幅度数据作为索引查表得到相应的相位数据[9]。对高PRF脉冲多普勒雷达进行自卫式干扰时,延时越小干扰效果越好,因此这里采用查表的方式进行幅相转换。设ADC的采样周期为Ts,量化位数为b,且输入信号经过预处理后,其幅度A与ADC最大输入电平相匹配。输出的I(n)、Q(n)两路正交数据为速率l/Ts,2b位的二进制数据流,经过幅相转换器转换后合成一路相位数据φ(n)存入存储单元中。b=1时,幅相转换表的输入输出关系如表1所示[10]。
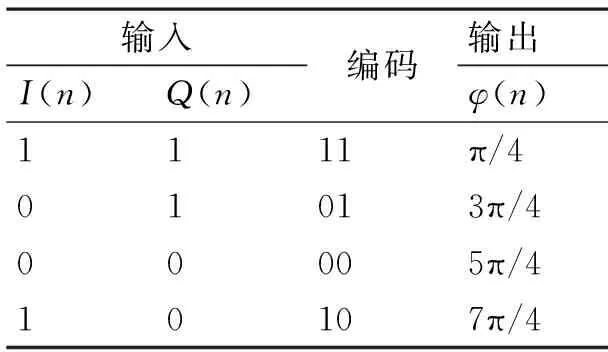
表1 1bit幅相转换表
当b≥2时,输入输出的关系用式(1)表示为
(1)
式中Δ为相位分辨率,Δ=2π/2B,B为相位量化位数。当ADC的量化位数b确定之后,幅相量化表输入部分的编码数也相应确定为2b。若B太小,会降低相位量化精度;若B太大(B>2b),则多余的输出项会占用存储器的存储容量,一般情况下选取B≤2b,形成编码逻辑表。
相幅转换同幅相转换一样,也是通过查表的方式实现,输入输出的关系用式(2)表示:
(2)
式中,A为幅度值,φ为相位值,b为幅度度量化位数。转换时,输入数据必须为正数,因此为了避免送入其中的幅度值出现负数,式中对所有相位的sin值加上1,使整体幅度值上移,这样得到的幅度值区间就是[0,1]。
幅度数据转换成相位数据之后,要进行相位校正还需要知道每次读取的信号最后一个相位和下一段信号第一个相位之间的关系,具体方法如下:
从图1中可以看出雷达信号脉冲宽度为τ,循环复制截取的雷达信号始段信号为D,宽度为τs。假设信号D的初始相位为φ,终止相位为φ,Δφ为终止相位和初始相位之差,即Δφ=φ-φ。进行示样脉冲读取时,第n次读取的信号为Dn,校正前Dn的初始相位和终止相位与D一样,校正后为φ(n)和φ(n)。
第一次读取时,信号D1作为输出脉冲信号的始段,不需要进行相位校正,因此D1的初始相位φ(1)和终止相位φ(1)即为φ和φ。
第二次读取时,为了使两段信号连接处的相位连续,需要将D2原本的初始相位φ修改为D1的终止相位φ,因此,D2所有的相位增加偏移量Δφ。此时,D2的初始相位φ(2)=φ+Δφ,终止相位φ(2)=φ+Δφ。
第三次读取时,D3的初始相位应与D2的终止相位一样,此时D2的终止相位为φ+Δφ,即φ+2×Δφ,所以D3增加的相位偏移量为2×Δφ,修正后D3的初始相位φ(3)=φ+2×Δφ,终止相位φ(3)=φ+2×Δφ。
以次类推,可以得出第n段信号Dn的初始相位φ(n)表示为式(3):
φ(n)=φ+(n-1)×Δφ
(3)
终止相位表示为式(4):
φ(n)=φ+(n-1)×Δφ
(4)
由此得出每次复制的信号相位与第一段读取信号相位之间的关系,在校正时依据公式计算就能实现边读取边校正,最终得到相位连续的干扰信号。
3 高PRF脉冲多普勒雷达干扰系统设计
高PRF脉冲多普勒雷达干扰系统的硬件主要由高速信号处理器(DSP)、大规模FPGA、高速ADC和高速DAC等组成。DSP用来接收外部的干扰控制信号并解析干扰参数;FPGA完成对ADC送来的一路数字信号的正交变换、幅相转换、信号读写和相幅转换,根据DSP送来的干扰参数对存储的信号进行调制,得到最终的数字干扰信号;DAC完成数字信号至模拟信号的转换。
如图2所示,高PRF脉冲多普勒雷达自卫干扰系统主要包括模数转换模块、正交变换模块、幅相转换模块、信号存储模块、信号读写控制模块、相位校正模块、相幅转换模块、数模转换模块。各模块的功能如下:
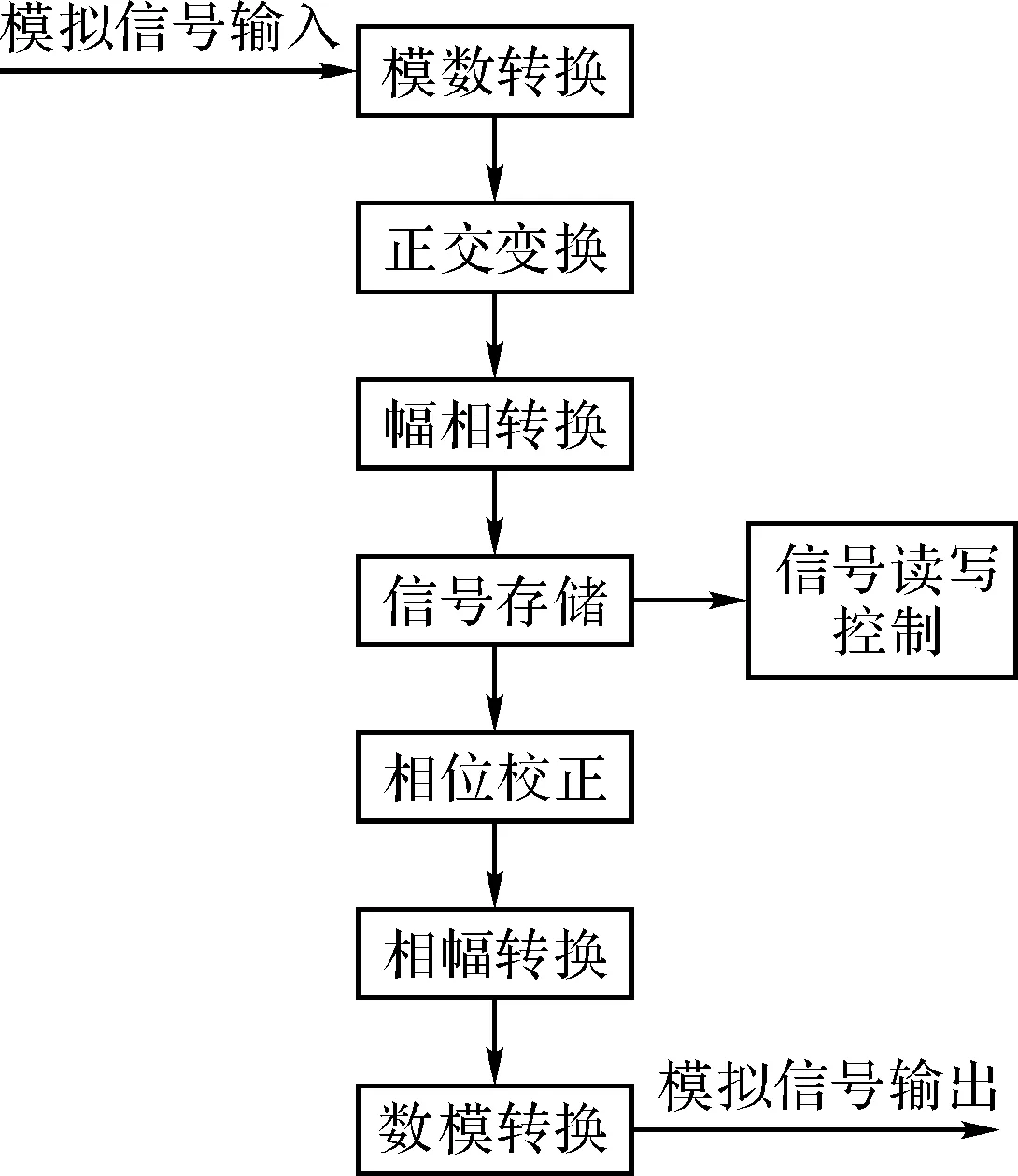
图2 高PRF脉冲多普勒雷达自卫干扰系统框图
1) 模数转换模块负责将中频模拟信号转换为数字信号。
2) 正交变换模块采用希尔波特算法对模数转换模块送来的一路幅度数据进行变换,最终得到两路正交幅度数据。
3) 幅相转换模块采用查表的方式将幅度数据转换为相位数据。
4) 信号读写控制模块和信号存储模块完成雷达信号的读写。信号读写控制模块控制信号读写逻辑将雷达信号存入信号存储模块,并在指定的延时之后重复从信号存储模块中读出存储的数据。
5) 相位校正模块完成对每次重复读取雷达信号的相位校正。
6) 幅相转换模块采用查表的方式将相位数据再转换为幅度数据。
7) 数模转换模块将最终得到的数字干扰信号转换为模拟信号输出。
4 性能测试
实际测试中,1GHz,8位量化位数的系统在50MHz~450MHz内输出的干扰信号杂散抑制大于-45dBc。对雷达的截取信号宽度选择200ns,循环复制次数选择20次,分别在信号为179MHz和279MHz时进行无相位校正循环复制干扰和基于相位校正的循环复制干扰测试,通过实时频谱仪和频谱仪分别对输出信号进行观测,得出的结果如图3~图6所示。图3、4通过实时频谱仪显示了输出信号的实时相位和瞬时频率,图(a)是实时相位图,图(b)是瞬时频率图。从图(a)可以看出没有相位校正时,输出信号在每次复制的起始位置都存在相位突变,此时从图(b)可以看出相位发生突变的同时瞬时频率也发生了变化。而有相位校正时,输出信号的相位在整个信号发射过程中都是连续的,信号的瞬时频率一直保持不变。

图3 179MHz信号无相位校正和有相位校正输出信号实时相位和瞬时频率图
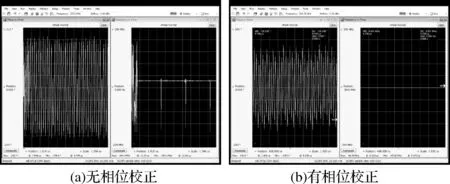
图4 279MHz信号无相位校正和有相位校正输出信号实时相位和瞬时频率图
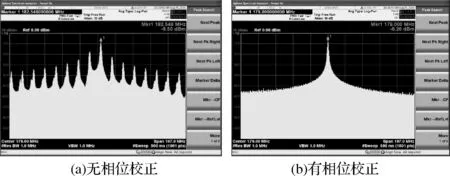
图5 179MHz时无相位校正和有相位校正干扰信号频谱
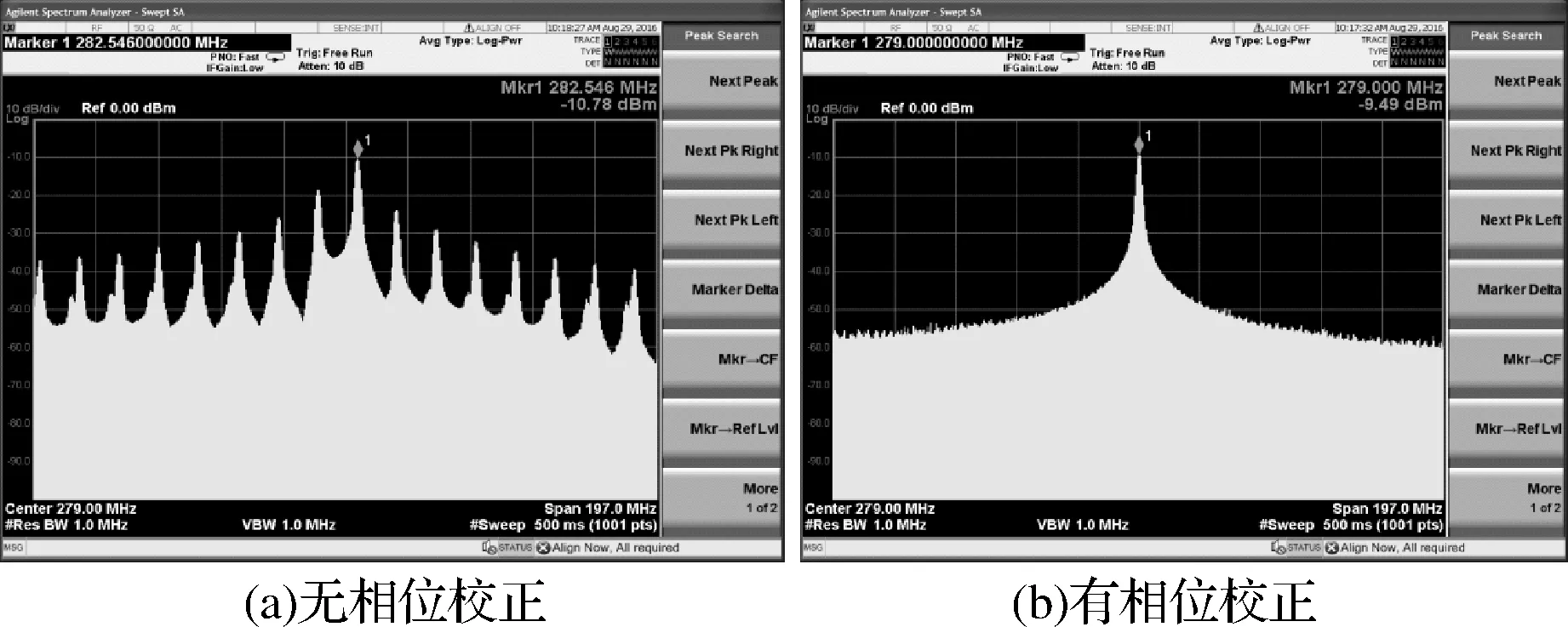
图6 279MHz时无相位校正和有相位校正干扰信号频谱
图5和图6显示了输出信号接非实时频谱仪的结果。从图中看出,无相位校正时,相位突变使得输出信号的频率较输入信号发生了偏移,还产生了除了主信号之外的杂波信号,而增加相位校正功能之后输出信号的频率与输入信号频率一致,频谱纯净度也大大提高。
5 结语
本文介绍了一种循环复制干扰技术,通过增加相位校正功能来解决产生的干扰信号相位不连续的问题。经实际测试,增加相位校正功能后的循环复制样式输出的干扰信号与无相位校正时相比信噪比更好,频率更准确,频谱纯净度也更高。但是本文采用的相位校正技术只能针对点频信号,对于脉冲压缩雷达的线性调频信号,信号的相位变化规律更为复杂,因此,如何对线性调频信号的循环复制干扰进行相位校正是后续研究的重要方向。
[1] 袁兴生.脉冲多普勒雷达信号处理实施仿真算法研究[D].长沙:国防科技大学,2009.
[2] 郭玲红,李亚立.脉冲多普勒雷达低速目标检测技术[J].航空兵器,2012(6):37-39.
[3] 张智敏.脉冲多普勒雷达的高重频调频测距性能分析[D].西安:西安电子科技大学,2009.
[4] 张杰儒.PD雷达干扰的若干问题[J].火力与指挥控制,2001(4):33-36.
[5] 户锋刚,阮怀林.脉冲多普勒雷达特征分析及干扰识别方法研究[J].舰船电子对抗,2007(3):30-36.
[6] 杨海林,郭爱芳,侯民胜.PD雷达抗速度欺骗干扰的计算机仿真[J].电子工程师,2005(10):2-6.
[7] 李淑婧.宽带DRFM的带宽扩展技术研究[D].西安:西安电子科技大学,2010.
[8] 曲尔光,曲荣,杨绍全.数字射频储频技术(DRFM)中的两种量化方法[J].运城学院学报,2003(3):16-18.
[9] 曲尔光,杨绍全.多比特相位量化器的优化设计[J].西安电子科技大学学报,2002(3):419-422.
[10] 程嗣怡,吴华,王星.应用于电子干扰中的1bit数字射频存储器DRFM的设计[J].弹箭与制导学报,2005(S9):280-281.
Jamming Technology of High-PRF Pulse Doppler Radar Based on Phase Calibration
YANG YiqianZHENG JigangAN Tao
(723 Research Institute, CSIC, Yangzhou225001)
This research suggests a jamming technology to high-PRF pulse doppler radar based on phase calibration, which adds phase calibration to circular-replication in order to clear up phase sudden change and get high-quality coherent jamming signal. The paper elaborates the principle and design of circular-replication base on phase calibration, and implements the hardware ,tests its performance. Besides, it also compares the jamming signal generated by with phase calibration and without phase calibration.
high-PRF, circular-replication, phase calibration, phase sudden change
2016年4月1日,
2016年5月23日
杨祎綪,女,硕士,研究方向:雷达有源干扰。
TN95
10.3969/j.issn.1672-9730.2016.10.018
猜你喜欢
计算技术与自动化(2022年2期)2022-07-04
股市动态分析(2021年25期)2021-12-30
海军航空大学学报(2021年1期)2021-09-01
国学(2020年1期)2020-06-29
通信电源技术(2020年22期)2020-03-27
通信电源技术(2020年20期)2020-02-02
家庭影院技术(2018年11期)2019-01-21
宇航计测技术(2018年3期)2018-09-08
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18