MEMS陀螺旋转导航误差的分析与仿真
2016-11-09 09:43周琼峰康国华陈雪芬
中国空间科学技术 2016年4期
周琼峰,康国华,*,陈雪芬
1.南京航空航天大学 航天学院,南京 210016 2.南京航空航天大学 自动化学院,南京 210016
MEMS陀螺旋转导航误差的分析与仿真
周琼峰1,康国华1,*,陈雪芬2
1.南京航空航天大学 航天学院,南京 210016 2.南京航空航天大学 自动化学院,南京 210016
目前基于高精度陀螺导航的旋转调制技术研究及应用已相当成熟,为实现低成本、低精度微机电系统(Microelectromechanical Systems,MEMS)陀螺的高精度应用,文章引入旋转调制技术。对旋转调制前后导航误差进行了理论分析和仿真,对比了相同条件下对不同精度陀螺的调制效果,分析了影响陀螺误差调制的因素。仿真结果表明,相同条件下低精度MEMS陀螺的旋转调制效果比高精度陀螺更加明显,在100 s内导航误差降低了30%以上。另外,对旋转导航误差的分析表明,研制高精度旋转调制转台是提高MEMS陀螺旋转调制精度的关键技术。
旋转调制;MEMS陀螺;调制转台;导航误差;调制速率误差
近年来,惯性导航系统发展迅速,以其独特的优点在航空、航天和航海等领域应用十分广泛,尤其是大量高科技战术武器,很大程度上体现了国家武器装备现代化的程度[1-3]。但目前使用的高精度惯性导航系统往往成本高,体积大,无法满足现代需求,所以为实现中精度、低成本的惯性导航系统,扩大其应用领域,引入了微型微机电系统(Microelectromechanical Systems,MEMS)技术和旋转调制技术。
MEMS惯性传感器是采用MEMS技术研制的陀螺和加速率计,其特点是体积小、成本低、抗振动冲击能力强、可靠性高,非常适用于构建低成本、微型捷联惯性导航系统。但目前的MEMS惯性传感器精度较低,误差随时间积累较大,大大降低了导航系统的精度;而旋转调制技术是一种全自主误差补偿方法,引入该技术能够有效地抑制MEMS惯导器件的常值误差,从而在使用低成本、低精度的微型MEMS惯导器件的同时提高其导航系统的精度。但目前旋转调制技术大部分是针对高精度陀螺,如光纤陀螺、激光陀螺等,较少有对MEMS等低精度陀螺的应用。文献[4]详细描述了惯性技术、导航技术领域内前沿研究机构研究惯性导航(MEMS-INS)的路线,总结了微型导航技术系统算法的研究现状,对MEMS-INS的发展进行展望,指出MEMS-INS的发展方向。文献[5]针对MEMS惯性器件低信噪比和漂移大的问题,提出了基于惯性测量单元(IMU)转动的MEMS器件误差旋转自补偿方法。将MEMS的输出信息利用小波降噪技术进行预处理,以此消除旋转调制方案不能自补偿的随机噪声信号并提高器件输出信噪比,试验表明,采用旋转状态下的MEMS惯导系统可有效地提高系统自身测姿和定位精度。文献[6]为了实现中精度、低成本的航姿参考系统,提出了一种基于低精度MEMS陀螺旋转调制技术的解决方案,研究了陀螺的刻度系数误差以及比例敏感漂移在旋转调制下的特性,分析了旋转调制技术可能引入的新误差,针对各种不同的误差源,给出了相应的误差补偿方法及补偿结果。
本文通过对现有文献[7-18]的调研,从理论上分析并仿真验证了旋转调制系统速率误差等因素对导航误差的影响,提出了提高旋转式MEMS陀螺精度的关键技术,并通过对比分析不同精度陀螺的旋转调制效果,验证了技术的有效性。
1 旋转调制原理
首先给出旋转调制导航系统常用的坐标系。
1)导航系(OXnYnZn):选取当地地理坐标系作为导航系。
2)机体系(OXbYbZb):与载体固连的坐标系,OXb为俯仰轴,OYb为横滚轴,OZb为方位轴。
3)IMU系(OXsYsZs):各轴指向惯性器件敏感轴方向,陀螺和角速率计的测量值为IMU系中的角速率和角加速率。
旋转调制技术是指在惯性导航系统中加入转动机构和测角装置,通过转动机构旋转调制将导航误差调制成三角波信号,在求解导航参数的计算过程中通过数学积分运算使得误差得到抵消和补偿,从而提高导航精度。
设MEMS陀螺仪东向、北向和天向漂移误差分别为εbx、εby、εbz,MEMS组件绕天向轴方向以角速率ω匀速旋转。
若载体坐标系与导航坐标系重合,则得到以下坐标转换矩阵
(1)
得到t时刻后MEMS陀螺的漂移误差调制为
(2)
设IMU转动一个短周期τ,对式(2)进行积分运算:
(3)
由此可以看出,通过IMU绕天向轴的单轴旋转调制,可以消除MEMS惯性敏感轴与旋转轴垂直的漂移误差,从而减小这部分漂移误差对导航系统精度的影响;但沿着旋转轴方向上的陀螺仪和加速率计的常值漂移仍按着原有的规律传播。
理想情况下,转位机构不存在角速度和角位置误差,相对于惯性系载体坐标系下的角速度可以表示为

(4)
(5)
设角位置误差为小量,则由转位机构误差引起的角速度误差为
(6)
由式(6)可以看出,转位机构角速度误差产生的影响等效于陀螺常值漂移误差。
2 仿真分析
采用单轴单向连续旋转的调制方案对不同精度MEMS陀螺的旋转调制效果以及旋转速率对调制效果的影响程度进行仿真分析。
仿真条件:设初始航迹位置经度、纬度、高度分别为110°、20°、500 m,初始横滚角、俯仰角、航向角分别为0°、0°、90°,机体的初始速率为0 m/s,用捷联组合导航算法对旋转调制前后的捷联飞行位置轨迹及误差进行仿真,仿真步长为0.02 s,仿真模型包括机体航迹发生器、IMU输出、IMU误差模拟、GPS/SINS(捷联惯导系统)组合导航系统、卡尔曼滤波等。
2.1不同精度陀螺旋转调制效果
设旋转调制系统角速率为10(°)/s(假设不存在旋转速率误差),仿真时间为100 s,经过旋转调制,MIMU导航系统俯仰轴姿态误差与高精度陀螺和中低精度的MEMS陀螺单轴零偏的关系如表1所示,输入量为陀螺零漂,仿真输出量为横滚角误差。
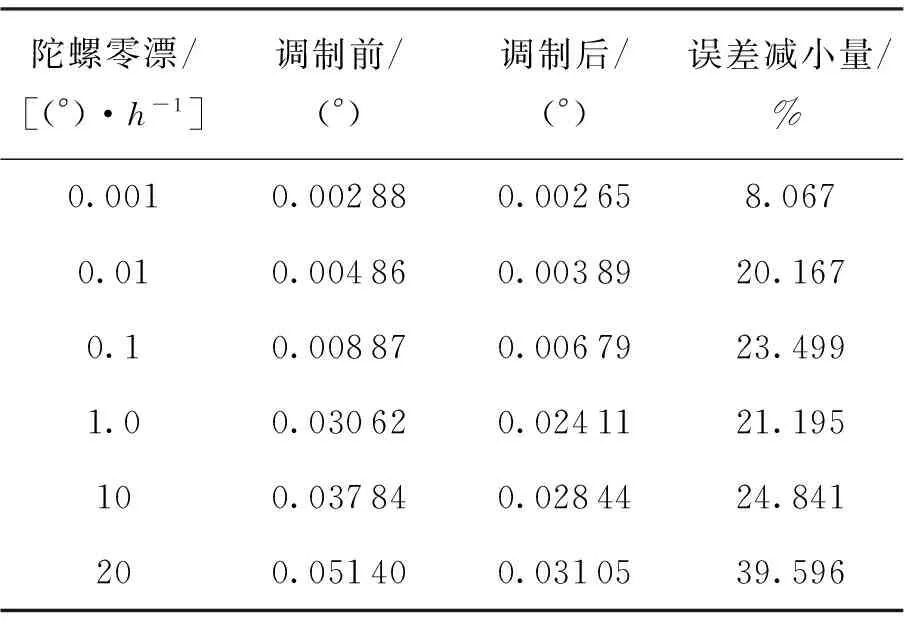
表1 仿真时间为100 s的横滚角误差
1)从表1可以看出,单轴陀螺零漂越大,即陀螺精度越低,产生的导航姿态角误差越大,这与陀螺零漂引起的误差方程[2]描述一致。
2)从表1的误差减小量看,对于较低精度的陀螺,即零漂在10(°)/h左右,旋转调制效果最明显。
3)零漂小于0.01的陀螺旋转调制效果较差,对比零漂较大的陀螺,根据陀螺的各项随机误差效应对导航误差的影响分析,其原因在于:零漂远远大于其他随机误差时,陀螺的漂移误差可近似等于常值零漂,零漂越大,产生的导航误差越大,旋转调制的效果越明显;零漂较小,与随机误差数量级相近,零漂产生的导航误差较小,陀螺随机误差引起的误差不可忽略,旋转调制的效果对随机误差的调制效果较差。
2.2旋转调制效果的影响因素
2.1节是在仿真时间和旋转调制速率一定的条件下,分析陀螺本身零漂对旋转调制效果的影响,但由文献[1]可知旋转调制的时间、旋转速率以及不同的旋转调制方法都会影响旋转调制效果,表2和表3给出了仿真时间为1 000 s时15(°)/s和6(°)/s旋转速率两种调制方式下的调制结果,其中陀螺零漂为0.01(°)/h。
从表2可以看出,在调制速率、调制时间相同的情况下,相比于100 s的调制时间,经过1 000 s的旋转调制后,各项导航误差都有很大的改善,尤其是姿态误差,精度提高了一个数量级;而对于单向连续旋转和正反连续旋转,对速率误差和位置误差的调制效果相当,但正反连续旋转对姿态误差的调制效果更好。
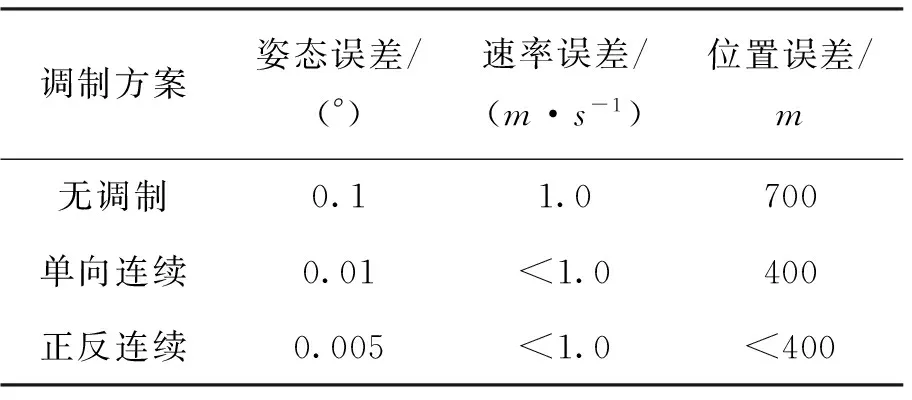
表2 仿真时间为1 000 s、旋转速度为15(°)/s的导航误差
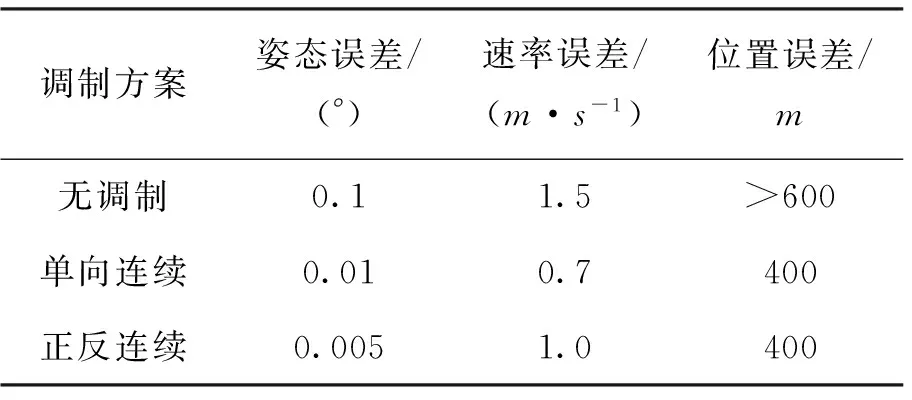
表3 仿真时间为1 000 s、旋转速度为6(°)/s的导航误差
表3结果显示,单向连续旋转与正反连续旋转对误差调制的效果和表2的结果一致,但在6(°)/s的转速调制下,旋转调制对速率误差的调制效果比15(°)/s的调制效果好。
综上所述,对于零漂为0.01(°)/h的陀螺分析可知,旋转调制的时间越长,误差调制效果越好;不同的旋转调制方案对各项导航误差调制效果不同;旋转调制速率对旋转效果有一定程度的影响。
2.3旋转速率对不同陀螺的调制影响
旋转调制速率w的变化范围为5~15(°)/s,以1(°)/s递增,对不同常值零漂的陀螺进行导航误差分析,结果如图1~图5所示。
由图1~图5可得到:
1)相比于高精度陀螺,旋转速率对低精度陀螺的调制效果影响较大;
2)对于姿态角误差,旋转速率对横滚角误差调制效果影响较大,且旋转速率在8~10(°)/s范围内平均角误差相对较小;
3)对于速度误差和位置误差,y轴方向上的误差对旋转调制速率比较敏感,所以要根据陀螺精度等实际情况选取合适的旋转速率范围。
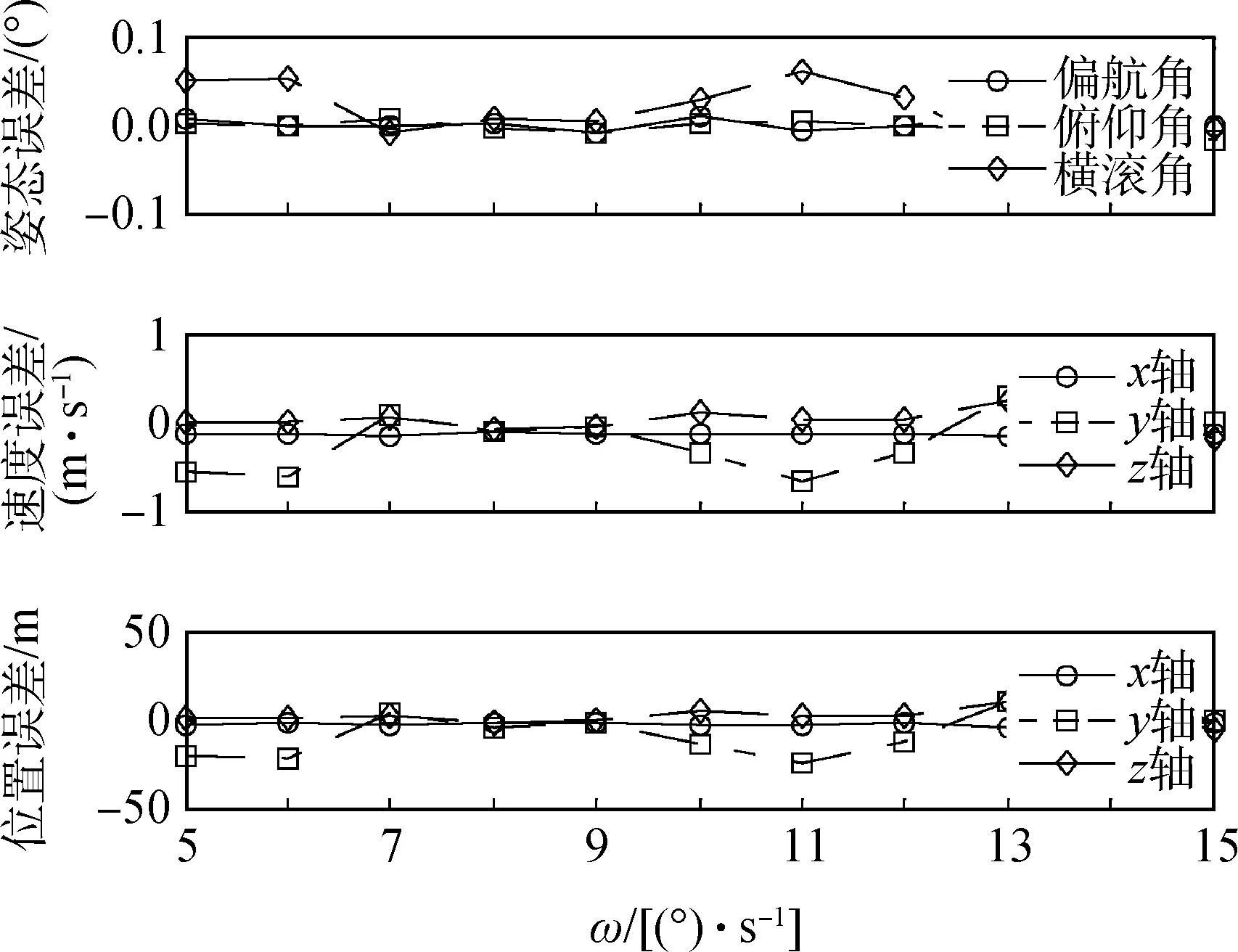
图1 陀螺零漂为0.001(°)/h的导航误差Fig.1 Navigation error for 0.001(°)/h gyro drift
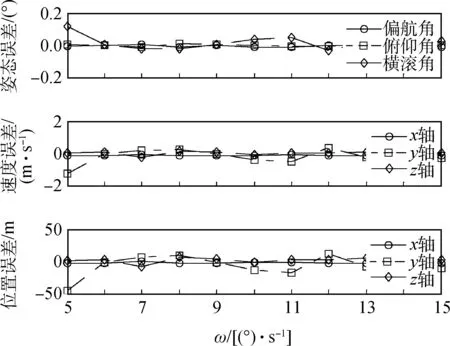
图2 陀螺零漂为0.01(°)/h的导航误差Fig.2 Navigation error for 0. 01(°)/h gyro drift
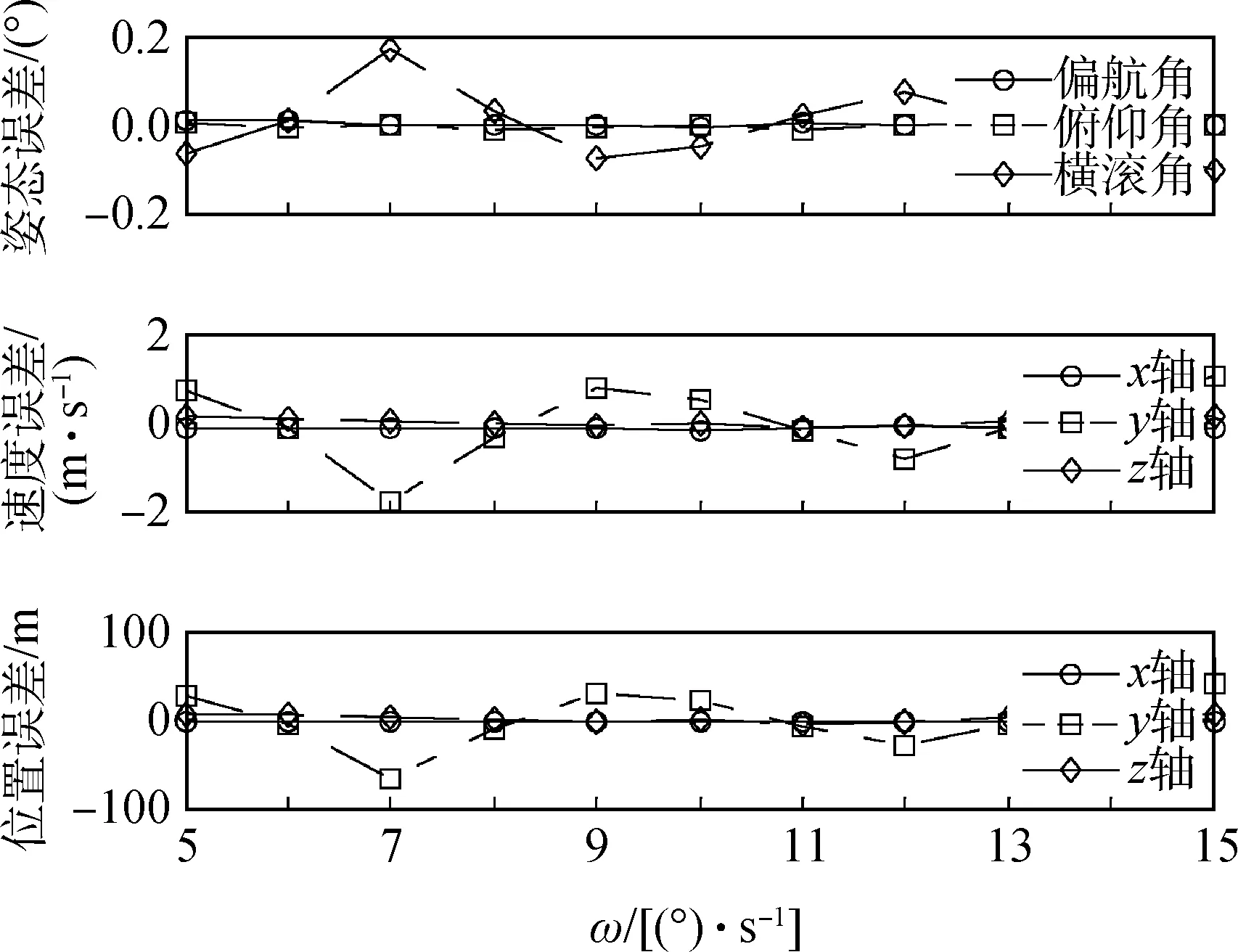
图3 陀螺零漂为0.1(°)/h的导航误差Fig.3 Navigation error for 0.1(°)/h gyro drift

图4 陀螺零漂为1(°)/h的导航误差Fig.4 Navigation error for 1(°)/h gyro drift
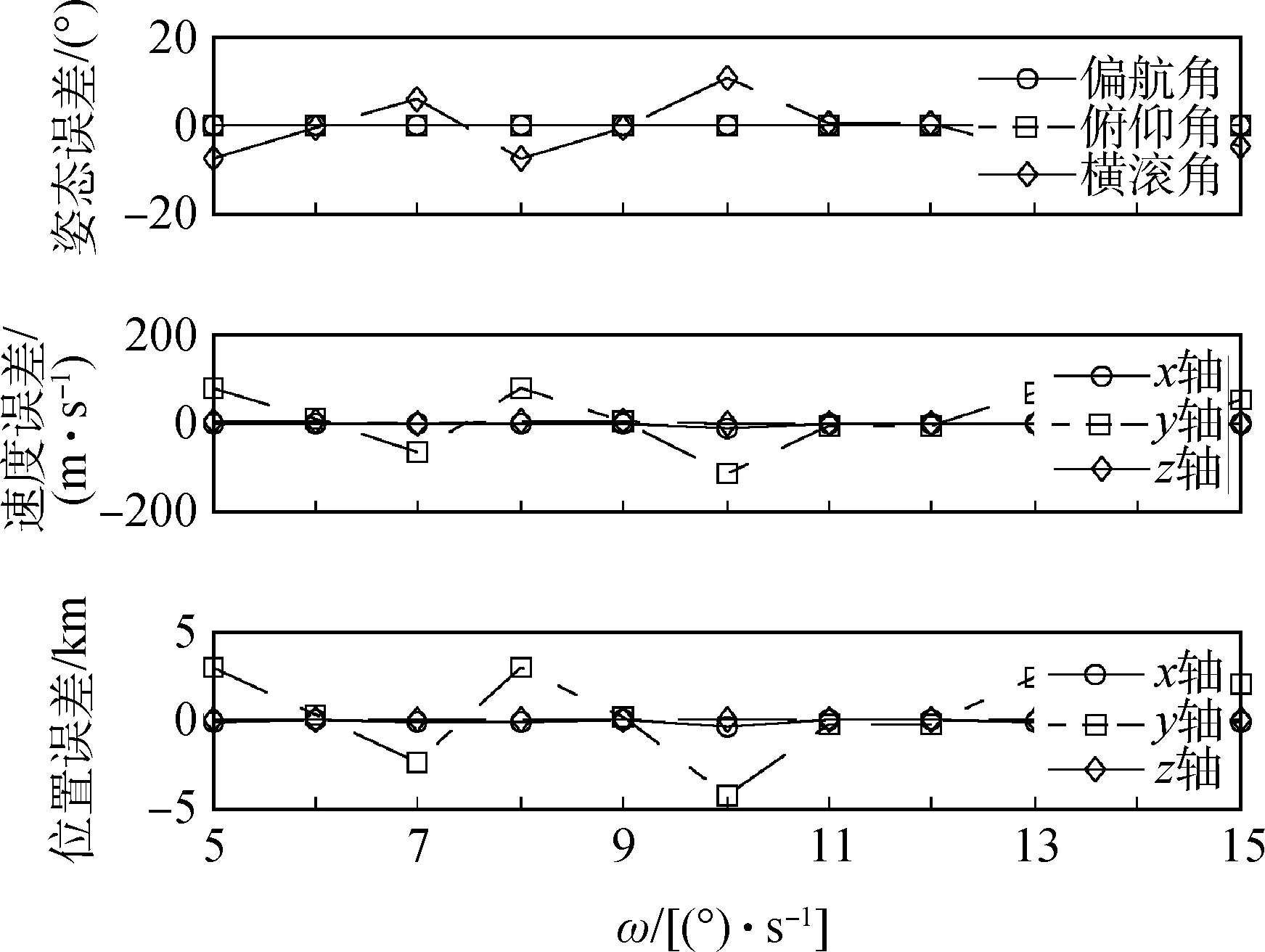
图5 陀螺零漂为10(°)/h的导航误差Fig.5 Navigation error for 10(°)/h gyro drift
2.4旋转速率误差对误差调制的影响
采用低精度的MIMU,其陀螺零漂为10(°)/h,旋转速率设为15(°)/s,仿真不同速率误差引起的导航误差大小,时间为100s,结果如表4所示。

表4 速率误差引起的100 s内的导航误差
由表4可知,对于10(°)/h的陀螺,旋转速率误差会引入新的导航误差,转位机构存在恒定的角速率误差,等效于存在相应的方位常值陀螺漂移。根据表4的数据,得到以下速率误差与导航误差的拟合曲线,从拟合曲线可以看出航向姿态角误差、北向速度误差和北向位置误差与旋转机构的角速率误差成线性关系,可以对旋转机构角速率精度的选择提供参考。
角速率误差与航向姿态误差角:
y=0.001 7x+67.834
角速率误差与北向速度误差:
y=0.003 2x+555.47
角速率误差与北向位置误差:
y=1.295 1x+36 402
综上所述,角速率误差对旋转调制的影响不可忽略,所以对于低精度陀螺的旋转调制,要控制转位机构的角速率误差,即对转位机构的精度由很大的要求。
3 结束语
本文通过对旋转调制前后导航误差的仿真,对比相同条件不同精度下陀螺的调制效果,分析了影响陀螺误差调制的因素。
1)精度高的陀螺旋转调制提高精度有限,精度低的效果明显,尤其是MIMU,能更好地利用旋转调制技术,同时突出自身低成本、小型化的优点,可用于研制中精度、低成本的惯导系统。
2)影响旋转误差调制效果的因素主要有:陀螺零漂、旋转方式、旋转角速率以及调制时间,陀螺的精度越低,旋转角速率对调制的影响越大;对于低精度的MIMU,更多考虑旋转调制角速率的误差带来的影响,对基于MIMU的旋转调制系统,应该选择高精度的转台,即角速率的误差要控制在一定范围内。
3)若转位机构存在恒定的角速率误差,会引入新的导航误差,所以调制低精度的MEMS陀螺,关键技术在于研制高精度的转位机构,从而提高受调制导航系统的精度。
References)
[1]齐广峰, 吕军锋. MEMS惯性技术的发展及应用[J]. 电子设计工程, 2015(1): 87-89.
QI G F, LV J F. The development and application of MEMS inertial technology[J]. Electronic Design Engineering, 2015(1): 87-89 (in Chinese).
[2]丁枫, 冯丽爽, 晁代宏, 等. 转台安装误差对捷联惯导标定的影响分析[J]. 弹箭与制导学报, 2013, 33(1): 19-24.
DING F, FENG L S, CHAO D H, et al.The influence of turntable fixing errors on optical gyro strapdown inertial system calibration[J]. Journal of Projectiles,Rockets,Missiles and Guidance, 2013, 33(1): 19-24 (in Chinese).
[3]李荣冰, 刘建业, 曾庆化, 等. 基于MEMS技术的微型惯性导航系统的发展现状[J]. 中国惯性技术学报, 2004, 12(6): 90-96.
LI R B, LIU J Y, ZENG Q H, et al. Present development situation on micro inertial navigation system based on MEMS technology[J]. Journal of Chinese Inertial Technology, 2004, 12(6): 90-96 (in Chinese).
[4]杨建业, 蔚国强, 汪立新, 等. 捷联惯性导航系统旋转调制技术研究[J]. 电光与控制, 2009, 16(12): 30-33.
YANG J Y, WEI G Q, WANG L X, et al. Research on rotating modulation technology of strapdown inertial navigation system[J]. Electronics Optics and Control, 2009, 16(12): 30-33 (in Chinese).
[5]孙伟, 初婧, 丁伟, 等. 基于IMU旋转的MEMS器件误差调制技术研究[J]. 电子测量与仪器学报, 2015(2): 240-246.
SUN W, CHU J, DING W, et al. Research on rotary MEMS device error modulation technology based on IMU[J]. Journal of Electronic Measurement and Instrument, 2015(2): 240-246 (in Chinese).
[6]徐烨烽, 仇海涛, 何孟珂, 等. MEMS旋转调制式航姿参考系统设计及误差补偿[J]. 兵工学报, 2011, 32(6): 691-696.
XU Y F, CHOU H T, HE M K, et al. MEMS rotation modulation navigation position reference system design and error compensation[J]. Acta Armamentarii Journal of China Ordnance, 2011, 32(6): 691-696 (in Chinese) .
[7]王学运, 吕妍红, 王玮, 等. MEMS器件捷联惯导系统旋转调制技术[J]. 东北大学学报(自然科学版), 2014, 35(4): 494-498.
WANG X Y, LV Y H, WANG W, et al. Rotating modulation technology of strapdown inertial navigation system on MEMS devices[J]. Journal of northeastern university (Natural Science), 2014, 35(4): 494-498 (in Chinese).
[8]柴永利. 捷联惯导系统误差调制技术研究[D]. 哈尔滨:哈尔滨工程大学, 2010.
CHAI Y L. Research on error modulation technology of the strapdown inertial navigation system[D]. Harbin: Harbin Engineering University, 2010 (in Chinese).
[9]姜朋. 基于MEMS-IMU的捷联式导航系统技术与实现研究[D]. 哈尔滨:哈尔滨工程大学, 2012.
JIANG P. Research of strapdown navigation system technology and implementation based on MEMS IMU[D]. Harbin: Harbin Engineering University, 2012 (in Chinese).
[10]李国强. 旋转捷联惯导系统技术研究[D]. 哈尔滨:哈尔滨工程大学, 2011.
LI G Q. Research on rotary navigation system technology[D]. Harbin: Harbin Engineering University, 2011 (in Chinese).
[11]王庭军. 旋转式捷联惯导系统关键技术研究[D]. 哈尔滨:哈尔滨工程大学, 2013.
WANG T J. Research on the key technology of rotary strapdown inertial navigation system[D]. Harbin: Harbin Engineering University, 2013 (in Chinese).
[12]毛玉良. 激光陀螺导航系统误差辨识与修正技术研究[D]. 北京:北京理工大学, 2014.
MAO Y L. Research on laser gyro navigation system error identification and correction technology[D]. Beijing : Beijing Institute of Technology, 2014 (in Chinese).
[13]王鑫哲. 光纤陀螺捷联旋转式惯导系统关键技术研究[D]. 哈尔滨:哈尔滨工程大学, 2011.
WANG X Z. Research on fiber optic gyro strapdown rotary inertial navigation system is the key technology[D]. Harbin: Harbin Engineering University, 2011(in Chinese).
[14]张鹏. 激光陀螺捷联惯导系统旋转调制技术研究[D]. 哈尔滨:哈尔滨工业大学, 2010.
ZHANG P. Research on laser gyro navigation system rotating modulation technology[D]. Harbin: Harbin Institute of Technology, 2010(in Chinese).
[15]于莹莹. 单轴旋转式捷联惯导系统误差调制技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2013.
YU Y Y. Research on error modulation technology of single shaft rotary strapdown inertial navigation system[D]. Harbin: Harbin Engineering University, 2013 (in Chinese).
[16]YANG Y, MIAO L J. Fiber-optic strapdown inertial system with sensing cluster continuous rotation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2004,40(4): 1173-1177.
[17]ISHIBASHI S, TSUKIOKA S, YOSHIDA H. Accuracy improvement of an inertial navigation system brought about by the rotational motion[C]∥OCEANS 2007-Europe,Aberdeen, 18-21 June, 2007, IEEE: 1-5.
[18]TITTERTON D H, WESTON J L. Strapdown inertial navigation technology[M]. 2nd ed. Reston: AIAA, 2004: 242-344.
(车晓玲、范真真)
收稿日期:2015-09-01;修回日期:2016-03-14;录用日期:2016-05-11;网络出版时间:2016-07-1213:26:47
网络出版地址:http:∥www.cnki.net/kcms/detail/11.1859.V.20160712.1326.005.html
基金项目:高分辨率对地观测系统重大专项
*通讯作者:李文然(1983—),男,硕士研究生,工程师,liwenran@wti.ac.cn,主要研究方向为遥感测控技术和智能交通技术
引用格式:李文然. 空间低温制冷控制器的缓启动电路建模分析[J].中国空间科学技术, 2016, 36(4):81-87.LIWR.
Modelinganalysisofsoft-startcircuitsofspacecoolingcontroller, 2016,36(4):81-87(inChinese).
Analysis and simulation on MEMS gyro rotary navigation error
ZHOU Qiongfeng1,KANG Guohua1,*,CHEN Xuefen2
1.College of Astronautics, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China 2.College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China
Currently, the research and application has been quite mature on rotating modulation technology of navigation based on high precision gyroscope. The rotating modulation technology was introduced to realize high precision application of the low precision MEMS gyroscope. According to the theoretical analysis and simulation of navigation error with rotating modulation or not, the effects on different precision gyroscope were compared under the same condition. As well, the factors that influenced the modulation result was analyzed in detail. It turns out that, compared to high precision gyroscope, the rotation modulation effect of low precision MEMS gyroscope is more obvious in the same condition, and more than 30% navigation error is reduced in the 100s due to rotation. In addition, developing high precision rotating modulation turntable is also one of the key technologies of improving the accuracy of the MEMS gyroscope rotation modulation.
rotating modulation;MEMS gyroscope;modulation turntable;navigation error;modulation rate error
10.16708/j.cnki.1000-758X.2016.0039
2015-11-26;
2015-12-30;录用日期:2016-05-11;
时间:2016-07-1213:26:58
http:∥www.cnki.net/kcms/detail/11.1859.V.20160712.1326.008.html
江苏省自然科学基金(SBK201343261)
周琼峰(1993—),女,硕士研究生,zhouqf0819@163.com
康国华(1978—),男,教授,kanggh@nuaa.edu.cn,主要研究方向为卫星总体设计与姿态控制
V448.2
A
http:∥zgkj.cast.cn
引用格式:周琼峰, 康国华, 陈雪芬.MEMS陀螺旋转导航误差的分析与仿真[J].中国空间科学技术, 2016, 36(4):74-80.
ZHOUQF,KANGGH,CHENXF.AnalysisandsimulationonMEMSgyrorotarynavigationerror[J].ChineseSpaceScienceandTechnology, 2016, 36(4):74-80.(inChinese).
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
河南科技(2022年7期)2022-05-23
数字海洋与水下攻防(2020年5期)2021-01-04
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
北京航空航天大学学报(2018年1期)2018-04-20
快乐语文(2018年36期)2018-03-12
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23