基于MEMS与扩频组网高速公路二次事故防撞系统设计*
2016-11-15 10:30刘恒罗栋梁刘峰
广东通信技术 2016年10期
[刘恒 罗栋梁 刘峰]
基于MEMS与扩频组网高速公路二次事故防撞系统设计*
[刘恒 罗栋梁 刘峰]
高速公路二次事故防撞系统对于人员的自救和财产的保护具有重要的意义。针对传统的高速公路防相撞系统的传输距离近、抗干扰能力弱、穿透能力弱、可靠性差等缺点,提出了一种结合SX1278扩频组网技术和MEMS姿态测量技术的高速公路二次事故防相撞系统的方案,并分析了相应的防撞算法,给出了不同场景时的仿真结果,验证了该方案的可行性。
扩频组网 姿态测量 二次事故 应急救援
刘恒
重庆邮电大学,重庆邮电大学移动通信技术重点实验室,硕士研究生,研究方向为姿态测量、导航雷达。
罗栋梁
重庆邮电大学,重庆邮电大学移动通信技术重点实验室,硕士研究生,研究方向为移动通信、导航雷达。
刘峰
重庆邮电大学,重庆邮电大学移动通信技术重点实验室,硕士研究生,研究方向为无线定位、移动通信。
1 引言
驾乘人员在汽车故障和发生交通事故时,按照道路交通安全法的规定,在车辆后方50~150米(各级道路要求不同)需要放置警示装置,用来提醒后来车辆注意避让。但在恶劣气候或复杂道路情况下,后面车辆驾驶员往往很难观察到前方警示牌,二次事故随之产生[1]。同时,驾乘人员在外出旅途中,遇到紧急情况时,无法通过现有手段通知就近的交警、医疗单位、车辆救援装置及保险公司,往往需要层层联系才能解决实际需求,误时误事。
为有效降低高速公路二次相撞事故的发生率,提高高速公路管理的自动化程度,本文提出了基于SX1278扩频组网技术和MEMS姿态测量技术的高速公路防相撞系统。该系统是由SX1278网络节点构成一个自组织无线传感器网络,网络中的每个子节点利用MEMS模块判断交通锥的姿态变化;同时每个子节点与主控节点相连,主控节点连有报警器和GPS、GPRS模块,使得救援人员可以第一时间做出防备和撤离,同时把驾乘人员的相关信息报告给就近的交警、医疗单位、车辆救援装置及保险公司等,及时做出救援和处理。
2 系统设计
2.1系统架构
本文所设计的基于SX1278扩频组网技术、MEMS姿态测量技术的高速公路防相撞系统包括传感器节点与控制中心两部分组成。传感器节点分为两部分:车载接收单元节点和交通锥发射单元节点,网络可以设置成星型网络,其中交通锥发射单元节点为子节点,车载接收单元节点为主节点,也为星型网络的集中器,多个交通锥发射单元节点(子节点)与唯一的车载接收单元(主节点)采取点对点通信,点对点通信模式可以避免使用路由的模式,减少信息传递时间和传输错误。控制中心分为两类:本地控制中心和远程控制中心。本地控制中心主要通过车载接收模块上的蓝牙与手机进行通信,当发生误报时,驾乘人员可通过手机控制声光报警停止;当没发生误报或者驾乘人员需要帮助时,可通过手机蓝牙软件控制模块打开GPS/ GPRS服务,将自己的定位信息以及车主之前预设好的信息通过GPS/GPRS模块发送出去;远程控制中心分为服务类控制中心和救援类控制中心,服务类控制中心主要包括附近的4S店和保险公司,救援类控制中心主要包括交警和医疗机构,控制中心可以通过发送反馈短信等方式确定驾乘人员是否需要服务或者救援。图1为高速公路防二次相撞系统总体框图。
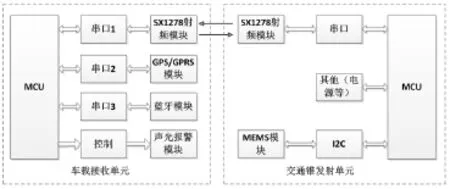
图1 高速公路防相撞系统总体框图
图1 中,MCU(处理器)本设计选用的是具有ARM内核的STM32F103芯片,用于控制整个节点的初始化、数据处理、协调各个模块的工作[2];GPS/GPRS模块选用simcom公司的SIM808模块,此模块内部镶嵌了高性能GSM/GPRS引擎和GPS引擎,用于获取当前节点的实时定位信息,并可以将定位信息和预设的车辆、驾乘人员的相关信息发送出去;SX1278射频模块负责维护当前网络,与其他节点进行通信,交换控制信息和收发数据;MEMS模块选用InvenSense公司的MPU6050姿态传感器,此传感器集成了3轴MEMS陀螺仪和3轴MEMS加速度计,用于判断交通锥的状态是否发生变化;声光报警模块用于当交通锥发生撞击时进行声光报警,从而附近的人员可以第一时间进行躲避,防止造成人员伤害;蓝牙模块用于模块与手机之间的通信;其中车载单元还有LCD模块,用于提供人机接口。
2.2无线传感器网络结构
目前的高速公路防相撞系统多采用ZigBee技术,ZigBee技术是一种具有低成本、低功耗、组网能力强等特点的新兴的无线组网通信技术,适合于各种监测领域[3]。但是ZigBee具有传输距离近、抗干扰能力弱、穿透能力弱等缺点。比如在高速公路的弯道,特别是在丛林、山坡附近时ZigBee技术就不再适用。再加上ZigBee网络有时会发生断网情况,在不能漏报、误报的前提下,ZigBee技术就不能满足高速公路的这种特殊场合。
相比于ZigBee技术,本文采用的是SX1278收发器,该收发器具有 LoRaTM 远程调制解调器,提供超长距离扩频通信,高抗干扰性,同时最大限度地减少电流消耗,适用于电池待机的收发电路。在自动抄表、家庭楼宇自动化、无线报警和安全系统、工业监控中得到广泛的应用。它具有能获得超过-148 dBm的高灵敏度,频率范围137~1 020 MHz,带 宽 7.8 ~37.5 kHz,数据传输速率180 bit/s~37.5 kbit/s,能够检测信号强度,并对数据进行CRC校验[4]。该收发器运用自扩频组网技术,可以完成一点对一点、一点对多点的通讯。
本文设计了一种嵌入式车载SX1278扩频网络节点,通过在车辆上配置这些节点,可以在高速公路局部范围内建立一个自组织无线传感器网络。在高速公路其中一个方向上局部范围的网络拓扑结构如图2所示。
系统中的节点分为车载单元的主控节点和多个交通锥的子节点,每个子节点都与主控节点自组网,不含有路由节点,为的是获得更少的时间传递信息从而给驾乘人员或者救援人员有多一点的时间做出反应。

图2 无线传感器网络结构
2.3系统功能
如上所述,在建立基于SX1278扩频组网技术的无线传感器网络和姿态测量传感器的基础上,通过交通锥被撞击后的状态,可以为驾驶员和救援人员提供如下主要功能:
(1)告警功能:告警功能为最主要的功能,当某一个或几个交通锥发生撞击后,车载端的声光报警器马上进行声光报警,为驾驶员或者救援人员第一时间做出反应,防止二次伤害造成巨大的人身及财产损失;
(2)SOS一键报警功能:车载单元根据不同市场(国内、国际)内置BD/GPS模块,根据不同需求内置GPRS/北斗短报文等通讯模块,设置SOS一键报警功能,后台根据用户提前设计的应急预案完成“通知应急联系人、通知交警、通知附近的修理店”等措施;
(3)后台系统功能:由第三方设计的后台系统可以进行数据搜集及接入如:驾驶人及车辆信息、交警系统、汽车销售商、指定医院、汽车维修店、保险公司等信息,便于在需要时帮助驾乘人员联络。
3 防撞算法设计
3.1加速度标准差计算原理
在交通锥被撞的情况下,MEMS模块中的加速度信号将发生异于静止状态的不规则变化,通过分析某一段时间段内的加速度信号的变化情况可以判断出交通锥被撞事件的发生,由于加速度信号的不连续性和不规则性给分析造成了极大困难[5-7]。本文提出了采用标准差分析法对加速度信号进行分析,这可以平滑加速度信号,使得分析处理的更为方便也更为准确。
当处理器采集到加速度传感器X轴、Y轴、Z轴的值


通过分析标准差,可以得到加速度值分散程度利用
3.2节的算法能够对交通锥的撞击事件做出判断。
3.2防撞检测算法设计
由于高速公路的特殊环境,以及为了降低功耗和达到最佳判断效果,处理器的采集频率设置为50 Hz,当车载主节点和交通锥子节点构建无线网络后,便开始数据采集工作,为了时间的可靠性,让加速度传感器一直处于工作状态[12-13]。处理过程如下:不断计算当前50个数据的标准值,如果在1s内标准差的值超过预设值,便认为交通锥出现了撞击(撞飞与一定的距离平移)事件,其中具体的预设值可以通过多次试验所得,本项目用的预设值为当有40%的标准差的值超过2时,即为发生了撞击事件,虽然在交通锥掀起一定角度并复位时有误报的情况,但应用在关乎人身安全的特殊场合是允许的,因为一旦发生误报,可能会造成严重的后果。
当处理器判断为事件(交通锥遭到撞击)发生,会立即把撞击信号通过SX1278模块的通信传给车载终端,声光报警器会立即产生声光报警,将撞击的事件传递给驾乘人员或者救援人员。节点的工作流程图如图3所示。
3.3 实验结果
为了检测加速度标准差防撞算法的正确性,论文对3种事件进行了模仿实验:(1)交通锥倾斜一定的角度后复位;(2)交通锥平移一段距离;(3)交通锥撞倒或者撞飞。具体的试验过程如下:
(1)针对事件1选择将交通锥快速倾斜到接近45度然后松开,静止时加速度矢量和为10,标准差略高于0。当交通准偶然发生倾斜后复位时,400 ms到800 ms的标准差超过了2,可以看出在交通锥下落的瞬间标准差变化较大,在此时间段加速度矢量和在10的上下进行剧烈变化,系统进行报警,实验结果如图4、图5所示。

图3 传感器节点工作流程图

图4 事件1加速度矢量和仿真图

图5 事件1标准差变化仿真图
(2)针对事件2选择将交通锥沿着某一方向快速平移一段距离,在这种情况下,加速度传感器的某一个方向的值急剧变化,标准差在150 ms到450 ms之间数值都超过了2,在此时间段加速度矢量和基本上在10以上变化系统进行报警,实验结果如图6、图7所示。

图6 事件2加速度矢量和仿真图

图7 事件2标准差变化仿真图
(3)针对事件3选择交通锥进行翻滚,在这种事件下,在150 ms到550 ms标准差的值超过了2,由于翻滚时加速度各方向均有变化,则在此时间段加速度矢量和在10上下进行剧烈变化,系统进行报警,实验结果如图8、图9所示。

图9 事件3标准差变化仿真图
on Wireless and Mobile Computing,Networking and Communications,2010: 368-375
12Lan Bing .Li Bingbing.Liu Jia.Chang Junsheng.Potential game resource allocation algorithm for high density D2D users.GuangZhou:Journal of South China University of Technology,2015:1-5
13MARCO B,GABOR F,ANDREA A.Performance analysis of a distributed resource allocation scheme for(D2D)communications[C]//In IEEE Workshop on Machine-to-Machine Communications,2014:358-362
14PIRO G,GRIECO L A,BOGGIA G,et al.Simulating LTE cellular systems:an open source framework [J].IEEE Transactions on Vehicular Technology,2011,60(2):498-513 Selection procedures for the choice of radio transmission
15technologies of the UMTS [Z].3GPP TR 30.03U,version3.2.0,1998 JANIS P,KOIVUNEN V,RIBEIRO C,et al.Interference-
16aware resource allocation for Device-to-Device radio underlaying cellular network [C]//Proc of IEEE VTC’ 09.Barcelona,Spain,2009郜伟伟,易辉跃,胡艳军,等.D2D 通信中基于信噪比均衡
17的资源分配算法[J].计算机工程,2012黄俊伟 .基于Kuhn_Munkres最优匹配的D2D资源分配算法
18设计.重庆邮电大学学报.2015
10.3969/j.issn.1006-6403.2016.10.013
国家自然科学基金(61301126),重庆市基础与前沿研究计划项目(cstc2013jcyjA40041)。
(2016-09-19)
猜你喜欢
当代水产(2022年6期)2022-06-29
汽车实用技术(2022年10期)2022-06-09
铁道通信信号(2020年8期)2020-02-06
汽车维修与保养(2019年3期)2019-06-19
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
中国公共安全(2017年11期)2017-02-06
医学理论与实践(2014年5期)2014-03-06
医学理论与实践(2014年23期)2014-03-06