移动机器人的路径规划与定位技术研究
2016-11-18 08:27林盛国
中国科技纵横 2016年18期
林盛国
(北京理工大学珠海学院,广东珠海 519088)
移动机器人的路径规划与定位技术研究
林盛国
(北京理工大学珠海学院,广东珠海519088)
随着社会的发展,导航技术是实现机器人移动的关键,在对导航技术应用过程中,要注重对移动机器人的路径规划与定位,能够更好地满足移动机器人的设计需要。移动机器人的路径规划与定位技术研究,要注重结合相关技术手段,对路径规划问题和定位问题进行有效分析,采取有效技术手段,实现移动机器人的移动和定位,更好地通过拐角区域。
移动机器人路径规划定位技术
导航技术是实现机器人移动的关键,在对导航技术应用过程中,要注重对移动机器人的路径规划与定位,能够更好地满足移动机器人的设计需要。移动机器人的定位,主要是借助传感器对机器人所处的环境进行分析,能够在保证移动机器人定位完成后,实现机器人的移动目标。移动机器人的路径规划,要注重结合机器人移动的特点,选择最优无碰路径,从而保证机器人能够有效行走。
1 移动机器人路径规划问题分析
本文在对移动机器人的路径规划问题分析过程中,注重立足于声呐和摄像头的信息融合技术为研究背景,通过对信息融合技术的有效应用,实现移动机器人路径规划问题。信息融合技术实现了对传感器信息资源的有效利用,能够利用计算机技术,更好地对传感器观测信息进行分析,并对信息进行综合、有效的利用,从而实现路径规划目标。移动机器人路径规划,要注重以融合方法进行实现,在这一过程中,需要根据移动机器人所处的环境进行考虑。在进行路径规划时,主要涉及到了D-S证据推理法、贝叶斯法、卡尔曼滤波法、加权法等[1]。
基于移动机器人路径规划问题,本文主要利用了加权法进行分析。在利用加权法过程中,首先对声呐和摄像头采集到的数据信息进行汇总和分析,将采集的信息进行距离转化,并定义l=∞;这样一来,摄像头在检测距离过程中,同样适用于l=∞。这样一来,在对距离分析过程中,通过利用加权算法,可以对数据进行预处理。在与处理过程中,要考虑到时刻k下,移动机器人处于怎样的状态,并且需要根据实际情况,对权值进行相应的调整。利用摄像头和声呐对移动机器人的路径进行规划时,要注重对局部路径问题进行考虑。一般来说,当机器人移动到门的位置时,并需要进行穿门操作时,需要保证穿行不受到障碍物影响,并且避免发生碰撞[2]。这样一来,就需要根据移动机器人垂直姿态情况,对轨迹进行有效规划。在路径规划过程中,我们可以结合图1进行分析。
如图1所示,在对移动机器人路径规划分析过程中,需要考虑到移动机器人的转弯动作,在进行设计过程中,我们需要对行进距离△进行把握,△=l-d,在转弯控制过程中,需要对转弯动作进行控制,这就需要把握左右转轮的关系,其关系如下所示:VR/V l=(r+N)/r,这样一来,在对转弯问题解决时,需要保持左右轮速处于相等的状态[3]。
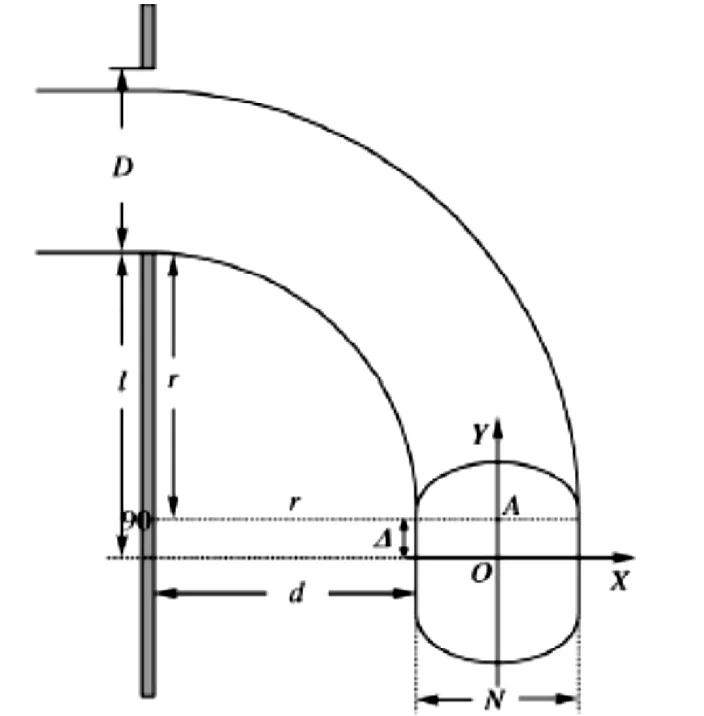
图1 移动机器人路径规划分析
2 移动机器人定位技术分析
在对移动机器人进行定位过程中,可利用信息融合技术实现移动机器人的自定位发展,这样一来,就需要根据移动机器人作业环境情况,对定位进行有效设计。例如移动机器人的行动环境为门型,在进行定位过程中,需要利用声呐对环境信息进行获取,并需要对机器人的行动姿态进行调整,使其能够与墙壁保持一个平行状态。在定位过程中,需要对N声呐测得的距离A1和M声呐测得的距离B1进行比较,若是N声呐和M声呐测得距离相等,这表明移动机器人与墙壁呈现平行的状态。这一过程中,机器人处于一个行走的状态,并且会根据声呐测得的信息,对自身的姿态进行调整。声呐P发出的超声波扫过门的前沿时,采集到的相关信息会出现跳变,在跳变状态下,邻点的数据差会超过距离最小值。这一过程中,就需要对距离“跳变”问题进行解决[4]。
对此,在进行移动机器人定位分析过程中,我们可以设置d1,d2为机器人距离墙壁的距离,d1和d2与A 1和B1属于对应关系。针对于这一问题,距离跳变情况下,存在d2-d1》dmin,基于这种情况,在对移动机器人进行定位时,我们需要对声呐C产生的距离跳变进行解决,假设d1=d2,距离l=tanθ[d+(N+2)-x]+y。同时,距离跳变问题,需要结合超声波镜面反射原理,需要保证C声呐设置角度为40°,并且在进行采样过程中,采样的频率应该控制在50m s一次。
在利用摄像头进行移动机器人定位过程中,可以将摄像头对准门框的边缘,之后对角度进行计算,对移动机器人与门之间的位置关系进行确认,从而实现机器人定位目标。摄像头定位过程中,要注重对角度进行把握,根据小孔成像原理,更好地保证机器人定位目标得以实现。
3 结语
移动机器人路径规划与定位技术应用,是满足移动机器人发展需要的重要技术手段,在进行路径规划和定位过程中,要注重把握传感器和摄像头信息技术的融合,能够保证机器人路径规划和定位具有智能化和自动化的发展特点。同时,路径规划与定位过程中,需要考虑到各自的实际特点,例如摄像头定位过程中需要对角度进行把握,声呐定位以及路径规划时,则需要对距离进行把握。因此,在日后的发展过程中,移动机器人的路径规划与定位技术应用,要注重对算法进行改进,更好地提升设计精度,以满足机器人路径规划和定位的实际需要。
[1]张银玲,牛小梅.蚁群算法在移动机器人路径规划中的仿真研究[J].计算机仿真,2011,06:231-234.
[2]王殿君.基于改进A~*算法的室内移动机器人路径规划[J].清华大学学报(自然科学版),2012,08:1085-1089.
[3]崔瑾娟.移动机器人路径规划技术现状与展望[J].安阳师范学院学报,2013,02:54-56.
[4]胡选子,董崇杰.基于智能技术的移动机器人路径规划方法概述[J].中国西部科技,2015,10:105-107.
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
北京航空航天大学学报(2022年6期)2022-07-02
汽车工程师(2021年12期)2022-01-18
海洋信息技术与应用(2020年3期)2020-08-24
小学科学(学生版)(2019年10期)2019-11-16
电子测试(2018年13期)2018-09-26
制造技术与机床(2017年3期)2017-06-23
声学技术(2014年1期)2014-06-21
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
中国海洋大学学报(自然科学版)(2014年7期)2014-02-28