
浅谈自适应跟踪窗的红外小目标检测
2016-11-19 16:47孙静晶崔夏菁汪鲁才
科技创新与应用 2016年4期
孙静晶 崔夏菁 汪鲁才
摘 要:红外目标检测与跟踪系统具有精密度高、非接触、抗电子干扰的特性,在光学侦察和导弹制导等军事领域应用广泛。由于自然环境的复杂性和工程应用中的实际需要,研究红外目标的检测和跟踪系统,使它具有更好检测和跟踪效果,一直是一项具有挑战性的工作。
关键词:红外目标检测;航迹关联;kalman滤波;自适应跟踪窗
1 概述
图像序列检测和跟踪点目标的问题以及它的战略意义,近年来一直是研究的热点问题之一。算法和硬件的性能提高了在复杂环境中检测弱小目标的处理能力。然而,由于现实环境的复杂性,没有一种通用算法在任何環境下都适应。造成这种情况的主要原因有:极低的信噪比,目标信号的不可重复性,目标有相似形状的干扰,被遮蔽的目标缺少一个初始条件和信号统计的先验信息等[1]。
利用多帧图像累计时空信息的方法,通常称为检测前跟踪算法。标准方法是将跟踪问题变为在3-D噪声中检测已知信号的问题。这些技术的主要缺点在于它们依赖于特定的统计噪声和干扰分布模型,而对真实数据不是很适用。特别是当整个3-D空间必须为每个目标速度的潜在轨迹滤波时,计算量非常大。
2 目标检测
于远距离红外小目标而言,背景中细节成分较少,小目标在图像中和背景相比是一些突出的峰值点,其中含有大量的高频信息,且与周围背景的相关性小。而背景由一些缓慢移动的云层组成,大部分为低频信息,且噪声具有高斯特征。因此,利用背景像素之间灰度的相关性,目标灰度与背景灰度的无关性,设计一个简单的空间高通滤波器,就可以滤除大量的背景像素,而只保留高频噪声和目标点,实现目标与背景的初步分离。
3 目标跟踪
假如在图像区域成功检测到目标,则进入目标跟踪状态,只需要将经阈值分割后标记的潜在目标和检测到的真实目标进行最近邻关联,便可实现持续跟踪。
(1)在红外检测跟踪系统中,如果成功在场景中确认目标,则将目标的坐标值和场景中心坐标值的偏差信息发送给转台,以控制转台移动,使目标始终锁定在视场中心。
目标运动时,将目标在视场中的坐标和视场中心的坐标的差值发送给转台,转台转动,但是转动的位置和真正的目标中心由于转台精度、目标时刻在运动等原因,总会存在一定的差值。
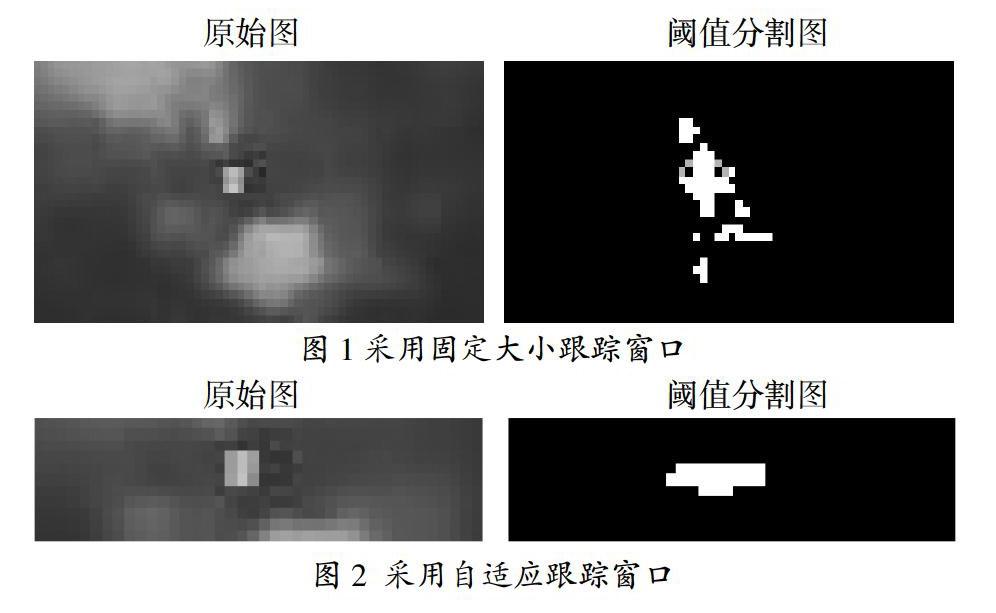
需要注意的是,跟踪框不能选得太小,在实际应用中需要设置一个下界,不然在阈值分割阶段无法正确提取出目标点。
由于采用了自适应的跟踪窗口,提高了算法的实时性。在某无人值守项目中采用的红外跟踪器上实验,算法的处理时间大约为20毫秒每帧左右,比采用固定大小跟踪框的时间大约节约了5%。
(2)目标跟踪过程中遮挡,丢失。
a.目标遮挡的判决。
空中小目标被遮挡主要表现为目标未越出视场边界,但在视场范围内未能检测到目标,这时一般为目标被云层遮挡。
b.目标被遮挡时的处理。
如果在自适应窗口中,连续多帧未能提取出目标信息,则扩大搜索窗口,或全帧搜索,进入检测状态,看能否检测到目标,如果未能检测到目标 ,说明目标受到了较大云层的遮挡,这时,我们认为目标彻底丢失,需要人为选定感兴趣区域。
4结束语
文章从实时性、实用性等方面出发,对空中红外小目标的检测和跟踪算法进行了详细阐叙,针对空中红外小目标跟踪时容易受云层干扰影响的问题,提出了一种基于kalman滤波思想的自适应跟踪窗口算法,尽可能地减少云层干扰信息对目标跟踪的影响:根据转台和目标的运动信息建立系统状态方程,通过kalman滤波预测跟踪框的大小,在保证能检测到目标的前提下,缩小跟踪框,从而对云层干扰能起到一定的抑制作用。通过在真实红外跟踪平台上的试验,证明文章方法能较长时间稳定的跟踪飞机等空中小目标。算法的平均处理时间为20毫秒每帧左右,完全能保证跟踪的实时性。
参考文献
[1]Ren-Jean Liou, Mahmood R. Azirdi-Sadjad. Multiple target detection using modified high order corre1ations[J].IEEE Transactions on Aerospace and Electronic Systems.VOL. 34,NO. 2 APRIL 1998.
[2]Porat, B., and Friedlander, B. A frequency domain algorithm for multiframe detection and estimation of dim targets[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,12(Apr.1990):398-401.
[3]Mohanty, N. C. Computer trxking of moving targets in space[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,I'AMI-3,1981,5:606-611.
[4]Roth, M. Neural networks for extraction of weak targets in high clutter environments[J].IEEE Transactions on Systems, Man, and Cybernetics,1989,10:1210-1217.
