
紧急避险车道全宽型服务车道设置位置
2016-11-23 06:01宋灿灿郭忠印宋超
同济大学学报(自然科学版) 2016年10期
宋灿灿, 郭忠印, 宋超
(1. 同济大学 道路与交通工程教育部重点试验室, 上海 201804;2. 贵州宏信创达工程检测咨询有限公司, 贵州 贵阳 550014)
紧急避险车道全宽型服务车道设置位置
宋灿灿1, 郭忠印1, 宋超2
(1. 同济大学 道路与交通工程教育部重点试验室, 上海 201804;2. 贵州宏信创达工程检测咨询有限公司, 贵州 贵阳 550014)
在设置全宽型服务车道且避险车道制动床宽度为9.0 m与4.5 m的断面条件下,利用UCWin Road Ver.9驾驶模拟仿真平台测试了5名驾驶员48次驶入避险车道的几何运动参数.选取方向盘转速指标对车辆驶入紧急避险车道的最小转向半径、方向调整时间、转向角幅值、转向角频率指标进行提取,选取横向偏移率指标对起弯点进行提取与理论验证,然后运用相关分析检验了5个指标与驶入速度的相关性,运用方差分析与配对样本T检验,检验了5个指标与全宽型服务车道设置的显著性.研究结果表明:当制动床宽度为9.0 m且服务车道设置于制动床左侧时,车辆行驶稳定性强,驶入紧急避险车道难度小,供车辆方向调整的距离长,驾驶员心理紧张程度低.当制动床宽度为4.5 m且服务车道设置于制动床左侧时,车辆的行驶稳定性强且易于驶入紧急避险车道.
避险车道; 驾驶模拟; 全宽型服务车道; 道路工程
自1956年美国加利福尼亚州修建第一条避险车道,其建设数量增长迅速.我国自1998年在北京八达岭高速设置第一条避险车道,现已投入使用的避险车道数量达400多条[1].避险车道利用车辆轮胎与坡床填料间的滚动阻力及车辆爬坡时所受爬坡阻力来降低车速,直至失控车辆安全停止.在车辆救援时,使避险车道成为有效安全设施的滚动阻力成为障碍,因此,必须针对救援车辆进行专用车道设计,故服务车道成为避险车道设计中不可缺少的组成部分.
据Ballard记载,1983年之前并不是所有的避险车道都有救援设施.但越来越多的现阶段研究支持服务车道的建设,并涌现了大量的研究成果[2].David指出如果服务车道设置于制动床侧,设计者应该对服务车道进行特殊设计,以避免失控货车驾驶员将服务车道与制动床混淆[3].服务车道与避险车道的区别在晚间尤为重要.加利福尼亚州设计指南规定:应该在碎石制动床一侧设置12~14英尺宽的服务车道[4].德国A7高速公路的避险车道将服务车道设置于制动床的左侧[5].云南省《自救匝道设计指南》中指出服务车道应与制动床完全隔离[6].杨少伟等指出服务车道宜设置在制动床右侧,宽度不小于3.5 m[7].王俊骅等指出服务车道应设置在避险车道制动床侧,便于拖车和维护车辆使用[8].陈竟飞建议避险车道采用10 m横断面,即0.75 m(路肩)+5 m(制动床)+3.5 m(服务车道)+0.75 m(路肩)[9].郭永谊根据设计车辆外廓尺寸、行车道宽度、失控车辆操控难易程度,建议采用12 m宽的横断面,即0.75 m(路肩)+7 m(制动床)+3.5 m(服务车道)+0.75 m(路肩)[10].
国内外与紧急避险车道设置相关的规范与指南中均未对服务车道与制动床的设置位置进行规定,对服务车道的研究集中于服务车道的设置宽度.通过对国内109条紧急避险车道的设置进行调研,58%的紧急避险车道设置了服务车道,且均设置于制动床的右侧.这与《中华人民共和国道路交通安全法》规定的机动车实行右侧通行的习惯相悖,且驾驶人错误的将服务车道视为制动床的事故时有发生,一般集中在夜间无照明避险车道区域内[8].
本文从交通安全的角度出发,运用驾驶模拟仿真技术,针对主线为直线段的紧急避险车道,研究制动床宽度为9.0 m与4.5 m时全宽型服务车道的设置位置,从而为我国紧急避险车道全宽型服务车道的设置提供参考.
1 试验方案
1.1 试验路段
仿真试验道路主线长4 km,紧急避险车道设置于3.5 km处.平面线形除2.0 km处设置半径2 000 m、长500 m的圆曲线外其余路段为直线.纵坡为-2%.横断面为宽24.5 m的标准横断面,即2.5 m(硬路肩)+3.75 m(行车道)×2+0.75 m(路缘带)+3.0 m(中央分隔带)+0.75 m(路缘带)+3.75 m(行车道)×2+2.5 m(硬路肩),并设置2%的双向横坡.
紧急避险车道的平面线形按照图1所示设置,流出角度设置为5°[11-12].横断面按照图2所示设置.纵断面线形中引道段和渐变段为平坡段,制动床纵坡为8%的上坡,竖曲线半径为600 m.由于不研究车辆驶入避险车道时的驾驶行为,因此,不对防撞砂袋进行细部设计.

图1 避险车道试验平面模型

1.2 被试驾驶员
为减少驾驶员驾龄与驾驶经验对试验的影响,选取5名熟练且未有驶入紧急避险车道经验的男性货车驾驶员进行试验.

表1 被试驾驶员信息
1.3 试验方法
试验采用日本Forum 8公司开发的UCWin Road驾驶模拟场景软件,该软件提供了地形、道路构造、模型、交通流及自然环境的模拟,并能连接多种性能与规模的驾驶模拟控制设备,且利用专用程序进行驾驶车辆及周边交通流的数据采集[13-14].驾驶模拟实验基于UCWin Road Ver.9驾驶模拟平台.
为了使被试驾驶员熟悉模拟器,驾驶员驾驶模拟器自带场景20km后驾驶试验场景.试验车型为6轴半挂车,驾驶员启动车辆并加速至要求车速后保持该速度至驶入紧急避险车道,并在车辆调整为驾驶员认为可顺利驶入制动床的方位或至制动床时停止方向调整.
1.4 数据初步处理
根据驾驶模拟器输出数据,可用于车辆驶入紧急避险车道位置判定的参数有横摆角、横摆角速度、X方向加速度、方向盘转角和方向盘转速5个指标,由于方向盘转速在渐变段和引导段的突变性最大,同时该指标是横摆角、X方向加速度、方向盘转角发生变化的原因,因此,选用该指标判定驾驶员何时驶入紧急避险车道.判定标准为当方向盘转速为相邻数据采集点转速的10倍以上时,该点确定为驾驶员方向调整区的起点或终点.
试验中将车辆自驶出圆曲线段,即主线2.5 km处至渐变段起点之间的车速进行离散度分析,选取车速变异系数作为标准将车速变异系数大于0.02的数据进行剔除.48组试验数据均能满足车速离散度的要求.
2 失控车辆行驶稳定性分析
失控车辆驶入紧急避险车道的转向圆曲线半径反应了车辆行驶的稳定性,车辆在转向过程中转向半径是连续变化的,因此,车辆稳定性最差的位置为转向圆曲线半径最小的位置.所以,选取最小转向半径作为研究指标.
由于试验过程中设定了车辆驶入紧急避险车道的驶入速度,因此,首先检验驶入速度与最小转向圆曲线半径之间的相关关系,因驶入速度与最小转向圆曲线半径均为连续变量,且符合泊松相关性检验的条件,因此,采用积差相关系数检验二者之间的相关性.

表2 驶入速度与最小转向圆曲线半径相关关系分析
通过二者相关性检验发现,驶入速度和最小转向圆曲线半径之间不存在相关关系.因此,最小转向圆曲线半径仅与紧急避险车道的设置条件有关.图3为最小转向圆曲线半径箱型图,在相同的横断面宽度条件下,服务车道设置于左侧时的最小转向半径大于服务车道设置于右侧时的最小转向半径,即服务车道设置于左侧时车辆的行驶稳定性优于服务车道设置于右侧时的行驶稳定性.
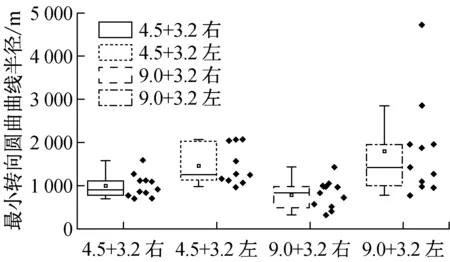
图3 最小转向圆曲线半径箱型分布
从最小转向圆曲线半径中位数来看,服务车道设置于右侧时最小转向圆曲线半径较服务车道设置于左侧时的小.从箱体宽度来看,服务车道设置于右侧时的离散度小,设置于左侧时的离散度大,但是相同设置宽度条件下两两方差之比小于3.从离群值和极端值分布情况来看,样本中存在一个离散程度大的数值.
采用方差分析法检验服务车道设置位置对车辆行驶稳定性的影响.通过方差齐性检验,两组数据均不满足方差齐性,但方差之比小于3,因此,通过方差分析检验的结果是稳定的.检验结果表明,当制动床为4.5 m时,检验统计量F=8.420,显著性P<0.01;当制动床为9.0 m时,检验统计量F=7.933,显著性P<0.05,服务车道设置位置对于车辆行驶稳定性存在显著性影响,即服务车道设置于左侧时更有利于车辆行驶的稳定性.
3 失控车辆起弯点分析
车辆在驶入紧急避险车道的过程中,横向偏移量是行驶距离的连续函数,如图4.横向偏移量的函数形状类似于弯起的预应力钢筋,而弯起的位置为车辆变换车道驶入紧急避险车道的起点,因此将该点定义为起弯点.将车辆横向偏移量与行驶距离的导数定义为横向偏移率,则起弯点位于偏移率的突变点,如图5所示.根据起弯点的定义,横向偏移率的突变点即为车辆驶入紧急避险车道的起弯点.

图4 横向偏移量

图5 横向偏移率
3.1 理论计算分析
如图6所示,从驾驶员心理角度分析,当制动床位于右侧而服务车道位于左侧时,由于制动床右侧设置有护栏,驾驶员可以沿护栏行驶,而当制动床设置于左侧时,由于左侧护栏设置在小鼻点之后,驾驶员无法沿护栏行驶,且驾驶员在决定驶入位置时需要避免驶入服务车道,因此,在相同的车辆转向角条件下,制动床设置于右侧时驾驶员的起弯点位置更早,即车辆获得的调整时间更多.
从几何关系角度分析,假设失控车辆驶入紧急避险车道的轨迹线平行于制动床,且均位于制动床的断面中心处;同时假设失控车辆转向驶入紧急避险车的行驶轨迹是圆曲线.

图6 车辆转向进入紧急避险车道示意图
由于主线与紧急避险车道的夹角α是相同的,因此行驶轨迹对应的圆心角相同,均为α,因此,车辆转向起始点的距离L2与车辆由于横断面设置不同产生的距离L1相同.根据几何计算关系,L1可根据式(1)计算,即
(1)
其中,ω为不同断面设置条件下车辆停驶于制动床时的横向距离.根据模型假设,制动床宽度为9.0 m时ω取5.2 m;制动床宽度为4.5 m时,ω取3.2 m.车辆转向起弯点理论计算距离如表3所示.

表3 服务车道不同设置位置条件下车辆转向起弯点距离
3.2 试验数据分析
试验数据输出间隔为0.06 s,根据导数的定义,若两点间距离无限小则相邻两数据点斜率即为该点的导数,因此,通过相邻两点的斜率进行横向偏移率的计算.4种断面类型的起弯点如表4所示.
断面宽度7.7m时渐变段起点为3 254.67 m,由表4中数据可知,起弯点均位于渐变段之前.断面宽度12.2 m时渐变段起点为3 150.95 m,起弯点均位于渐变段之后.起弯点与驶入速度、横断面设置条件两个因素有关,因此首先检验起弯点与驶入速度间的相关关系,因驶入速度与起弯点均为连续变量,且符合泊松相关性检验的条件,因此采用积差相关系数检验二者的相关性,如表5.
通过二者相关性检验,一组断面驶入速度与起弯点间存在相关关系,因此,对(4.5+3.2)m宽横断面组进行配对样本T检验,(9.0+3.2)m宽横断面组进行方差分析,检验横断面设置位置对于起弯点影响的显著性.通过配对样本T检验,P=0.055>0.05,即不存在显著性差异,服务车道的设置位置对起弯点没有显著性影响.

表4 不同断面组成车辆起弯点统计表

表5 驶入速度与起弯点相关关系分析
注:*标注为在0.05显著水平下二者呈现相关性.
如图7,断面宽度为(9.0+3.2)m时,从起弯点桩号中位数来看,服务车道设置于右侧时起弯点桩号较大.从箱体宽度来看,服务车道设置于右侧时的离散度较大.采用方差分析法,检验服务车道的设置位置对车辆的起弯点影响的显著性.数据满足方差齐性检验.检验统计量F为20.278,显著性P<0.001,服务车道设置位置对起弯点存在显著性影响,即服务车道设置于左侧时起弯点桩号小,二者均值相差28.1 m.

图7 不同断面设置条件下起弯点箱型分布图
通过试验数据分析,紧急避险车道断面宽度为7.7 m时,服务车道设置位置对起弯点没有显著影响;紧急避险车道断面宽度为12.2 m时,服务车道设置位置对起弯点存在显著影响,且二者的差值达28.1 m,约为车辆驶入速度的1 s行程,可以显著提高车辆驶入紧急避险车道的调整时间.
对比理论计算结果与实测数据结果,理论计算模型中起弯点均位于渐变段起点之前,实测结果表明当断面宽度增大时,起弯点位于渐变段起点之后,说明紧急避险车道断面宽度过大时单圆转向模型已不适用.对比理论计算值与实测值可知,理论计算起弯点距离比实测起弯点距离长,但变化规律一致.
4 方向调整段时间分析
定义了方向调整段时间,该时间为驾驶员驶经方向调整段时需要的时间.调整段长度是指驾驶员自驶入紧急避险车道渐变段起,至车辆方向调整至驾驶员认为可顺利驶入制动床止或制动床起点处止.
将驾驶员在转向过程中需进行方向调整的时间进行统计,并按驶入速度的大小进行排序,如表6.根据表中数据做不同断面设置条件下方向调整时间的箱形图,如图8.
同一宽度条件下,服务车道设置于左侧时驾驶员的方向调整时间略低,且在避险车道设置宽度较低时该影响更为明显.从箱体宽度来看,不同断面条件下调整时间的离散度基本相同.
由试验设计可知,方向调整时间受驶入速度和断面条件的影响,首先分析驶入速度与方向调整时间的相关性,因驶入速度与方向调整时间均为连续变量,且符合泊松相关性检验的条件,因此采用积差相关系数检验二者之间的相关性,如表7.

表6 不同断面设置条件下驾驶员方向调整时间统计

图8 不同断面设置条件下方向调整时间分布图

表7 驶入速度与方向调整时间相关关系分析
注:**标注为在0.01显著水平下二者呈现相关性.
通过二者相关性检验,一组断面方向调整时间与驶入速度之间存在相关关系,但回归分析发现,速度每增大1 km·h-1,调整时间增加0.027 s,速度对调整时间的影响较小,因此仍然假定方向调整时间仅受横断面条件的影响.对不同断面组进行方差分析,检验横断面条件对方向调整时间影响的显著性.数据满足方差齐性.对于(9.0+3.2)m横断面组,检验统计量F=3.124,显著性P=0.093>0.05,对于(4.5+3.2)m横断面组,检验统计量F=0.236,显著性P=0.632>0.05,因此横断面条件对调整时间不存在显著的影响.
5 操控行为特征分析
车辆在驶入紧急避险车道的过程中,驾驶人对方向盘的操控水平反应了驾驶人对方向盘的操控能力.通过方向盘转角的散点图,如图9所示,可以看到,其变化规律类似于有阻尼的波动,而阻尼为车辆距离车道中心线的距离.因此,可以反应驾驶员对车辆操控行为特征的因素为幅值与频率.

图9 方向盘转角沿桩号的分布规律
5.1 转向角幅值
驾驶员驶入避险车道的转向角幅值定义为车辆转入紧急避险车道过程中最大转向角与最小转向角的差值,反应了驾驶员驶入紧急避险车道的难易程度.
不同驶入速度条件下,服务车道设置于左侧时转向角幅值较小,但不同断面条件下转向角幅值离散度基本相同,如图10和图11所示.对驾驶员在不同横断面条件下转向角幅值进行配对样本T检验,结果见表8.检验结果表明服务车道设置位置对转向角幅值存在显著差异,即当服务车道设置于左侧时更易于驾驶员驶入紧急避险车道.

图10 7.7 m横断面幅值分布

图11 12.2 m横断面幅值分布
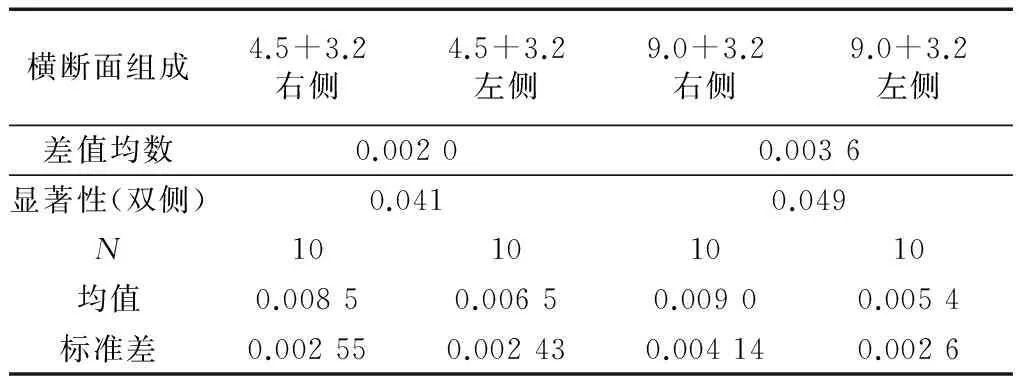
表8 不同横断面设置条件下转向角幅值配对样本T检验统计
5.2 转向角频率
驾驶员驶入避险车道的转向角幅值与幅值之间时间差的比值定义为转向角频率,反应驾驶员驶入避险车道的紧张程度如下:
(2)
式中:F为转向角频率;amax和amin分别为驾驶员驶入避险车道的最大和最小转向角;t为驾驶员从最大(最小)转向角变化为最小(最大)转向角所用时间.根据上式计算车辆的转向角频率,散点图如图12和图13.
横断面宽度7.7 m时不同断面条件下转向角频率无明显规律,断面宽度为12.2 m时服务车道设置于左侧时转向角频率与离散度较小.对驾驶员在不同横断面条件下转向角频率进行配对样本T检验,结果如表9.横断面宽度12.2 m时,服务车道设置位置对转向角频率存在显著影响,服务车道设置于右侧时驾驶员驶入紧急避险车道更紧张.

图12 7.7 m横断面频率分布

图13 12.2 m横断面频率分布

表9 不同横断面设置条件下转向角频率
6 结论
通过对失控车辆行驶稳定性、起弯点、方向调整时间与操控行为特征分析,制动床宽度为9.0 m且服务车道设置于制动床左侧时,车辆的行驶稳定性更好,拥有较长的空间距离调整车辆的行驶方向,驶入避险车道越容易,驾驶员心理紧张程度明显降低.制动床宽度为4.5m且服务车道设置于制动床左侧时,车辆的行驶稳定性更好,驶入避险车道更容易.
综合以上分析,制动床断面宽度在4.5~9.0 m时,全宽型服务车道宜设置于制动床的左侧,该项研究结论也符合驾驶员靠右行驶的驾驶习惯,尤其是在夜间,可减少车辆误驶入服务车道的事故.
[1] 梁志林. 河北省山区高速公路避险车道关键技术研究[J]. 石家庄: 河北省交通运输厅科技教育处, 2010.
LIANG Zhilin. Research on key technology of truck escape ramp of mountainous expressway in Hebei province [R]. Shijiazhuang: Technology and Education Division at Hebei Transportation Department, 2010.
[2] Ballard, Andrew J. Current state of truck escape ramp technology[J]. Transportation Research Record, 1983,923:35.
[3] Whiteford K D. NCHRP Synthesis 178: truck escape ramps[R]. Washington D C: National Research Council of Transportation Research Board, 1992.
[4] Edward J T. Design guide for truck escape ramps[S]. [S.l.]: Department of Transportation, 1986.
[5] Owe work. Notbremsweg für LKW am ende der Gefällstrecke vor der Werratalbruecke der A 7 in Richtung Hannover[EB/OL]. [2015-08-30].https://commons.wikimedia.org/wiki/File:A7-Notbremsweg.jpg.
[6] 云南省交通运输厅. 自救匝道设计指南[S].昆明:云南省交通运输厅, 2014.
Yunnan Provincial Transportation Department. Design guide of emergency escape ramp[S]. Kunming: Yunnan Provincial Transportation Department, 2014.
[7] 杨少伟. 道路勘测设计[M].3版. 北京: 人民交通出版社, 2009.
YANG Shaowei. Road surveying and design[M]. 3rd ed. Beijing: China Communications Press, 2009.
[8] 王俊骅,方守恩,陈雨人,等. 高速公路特大交通事故预防技术研究及示范[M]. 上海: 同济大学出版社,2011.
WANG Junhua, FANG Shouen, CHEN Yuren,etal. Study and demonstration of serious traffic accidents prevention technology on freeway [M]. Shanghai: Tongji University Press, 2011.
[9] 陈竞飞. 避险车道的设计探讨[J]. 城市道桥与防洪, 2008(1): 19.
CHEN Jingfei. Study on the design of truck escape ramp[J]. Urban Roads Bridges & Flood Control, 2008(1): 19.
[10] 郭永谊.避险车道设计及存在问题的分析[J]. 工程建设与设计, 2013(11): 104.
GUO Yongyi. Emergency lane design and problems analysis[J]. Construction & Design for Project, 2013(11): 104.
[11] 中交第一公路勘察设计研究院有限公司. 公路路线设计细则[S]. 西安:中交第一公路勘察设计研究院有限公司,2008.
China Communications Construction First Highway Consultants Co., Ltd. Design detailed regulations for highway alignment[S]. Xi’an: China Communications Construction First Highway Consultants Co. Ltd., 2008.
[12] 牛建峰,王俊骅,董宪元. 山区公路紧急避险车道驶入角研究[J]. 重庆交通大学学报:自然科学版,2010,29(4):604.
NIU Jianfeng, WANG Junhua, DONG Xianyuan. Research on the angle to truck escape ramps of mountain road [J]. Journal of Chongqing Jiaotong University: Natural Sciences, 2010, 29(4):604.
[13] 金淳, 舒宏. 保税港区运作系统规划的VR仿真建模与实现[J]. 系统仿真学报, 2010, 22(4):1042.
JIN Chun, SHU Hong. Modeling and realization of virtual reality simulation system for operation system planning of free-trade Port Area [J]. Journal of System Simulation, 2010, 22(4):1042.
[14] 冯志慧. 基于驾驶员认知特征和视觉特性的高速公路景观设计方法研究[D]. 西安:长安大学, 2012.
FENG Zhihui. Study on freeway landscape design method based on drivers’ cognitive and visual characteristics [D]. Xi’an: Chang’an University, 2012.
Location of Full-width Service Lanes on Truck Escape Ramp
SONG Cancan1, GUO Zhongyin1, SONG Chao2
(1. Key Laboratory of Road and Traffic Engineering of the Ministry of Education, Tongji University, Shanghai 201804, China; 2. Guizhou Hongxinchuangda of Engineering Inspection & Consulting Co. Ltd., Guiyang 550014, China)
Under the condition that full-width service lanes are set on truck escape ramps and the width of arrester bed is 9.0 m or 4.5 m, 48 groups of motion parameters in the process of entering truck escape ramps by 5 drivers were obtained through driving simulation UCWin Road Ver.9. Then the minimum turning radius, adjusting time, steering angle amplitude and steering angular frequency were extracted by judging lateral migration rate and validated by theory. The correlation between the above five index and operation speed was analyzed. At the same time, the significance between the above five indexes and the full-width service lane’s position was tested via the variance analysis and the paired sample T test. Research result indicates that when the arrester bed width is 9.0 m and service lane is located on the left side, the errant vehicle will be more stable and easier to enter the truck escape ramp, the space to adjust the vehicle’s driving direction will be larger, and it will be easier to enter the truck escape ramp and drivers’ psychological tension will decrease. When the arrester bed width is 4.5 meters and the service lane is located on the left side, the errant vehicle will be more stable and the entrance of the truck escape ramp will be more accessible.
truck escape ramp; driving simulation; full-width service lanes; road engineering
2015-09-30
贵州省交通厅科技项目(2014-122-011);山西省交通厅科技项目(2014-1-18);同济大学国际合作培养基金(2016XKJC-007);“十二五”国家科技支撑计划(2014BAG01B01)
宋灿灿(1988—),女,博士生,主要研究方向为道路安全与环境.E-mail:77conshir@tongji.edu.cn
郭忠印(1962—),男,教授,博士生导师,工学博士,主要研究方向为道路安全与环境.E-mail:zhongyin@tongji.edu.cn
U491
A
猜你喜欢
卫星应用(2021年11期)2022-01-19
科学大众(2021年9期)2021-07-16
中国交通信息化(2020年11期)2021-01-14
中外公路(2019年5期)2019-01-15
中华老年口腔医学杂志(2016年6期)2017-01-15
中国感染控制杂志(2015年7期)2015-12-13
医学研究杂志(2015年5期)2015-06-10
中国交通信息化(2015年10期)2015-06-06
中国当代医药(2015年17期)2015-03-01
人生十六七(2015年5期)2015-02-28
