
面向侧翻试验的线控主动转向试验台架构建
2016-11-23 06:01王阳阳
同济大学学报(自然科学版) 2016年10期
王阳阳, 潘 定, 李 巍, 付 涛
(1.同济大学 新能源汽车工程中心,上海 201804; 2.同济大学 汽车学院,上海 201804;3.同济大学 电子信息与工程学院,上海 201804; 4.浙江吉利汽车研究院,浙江 杭州 317000)
面向侧翻试验的线控主动转向试验台架构建
王阳阳1,2, 潘 定2, 李 巍3, 付 涛4
(1.同济大学 新能源汽车工程中心,上海 201804; 2.同济大学 汽车学院,上海 201804;3.同济大学 电子信息与工程学院,上海 201804; 4.浙江吉利汽车研究院,浙江 杭州 317000)
为了研究通过线控主动转向系统实现的侧翻控制,需要建立合适的试验台架.首先分析了面向侧翻的线控主动转向硬件在环实验平台结构,建立了整车模型、实验管理软件和硬件平台.硬件平台中包括转向器、磁粉制动器转矩模拟加载装置和数据采集装置.分别在75°方向盘角脉冲、25°方向盘角阶跃、20 km·h-1车速紧急调头、80 km·h-1车速双移线和70 km·h-1车速蛇形工况下,对仿真和实验下的表征整车侧翻程度的车身侧倾角进行了监测,得到两种结果相近,说明了该试验台架的侧翻实验的适用性.
汽车侧翻; 线控主动转向; 硬件在环; 磁粉制动器
侧翻是汽车转向时发生的一种极限危险工况,是汽车侧向动力学的典型非线性工况.侧翻往往是在急速转向或高速转向时发生,通常通过汽车车身侧倾角来表示侧翻的危险程度[1-2].
根据汽车系统动力学分析,汽车侧翻与汽车的悬架、整车侧倾刚度和整车质心分布等有关.Hocine研发了一种用于估计车辆动力学状态的高阶滑模观测器,可以监测侧向加速度极限和整车质心高度.并通过算法控制侧向位移和侧向速度以保证整车稳定性从而避免侧翻[3].但是在汽车被设计好后,为了减少侧翻危险,通常需要通过监测左右车轮的载荷转移控制整车的姿态来实现.Chad研发了一种预测载荷转移率控制侧翻,通过监测驾驶员方向盘转角和其它从车辆稳定程序中获得的传感器信号实现[4].汽车的侧滑危险一般是通过制动或驱动执行器的整车稳定程序实现控制;而对于汽车的侧翻有不少是通过主动转向控制实现.Solmaz S.提出一种利用主动转向来避免侧翻的鲁棒性控制设计方法,通过在驾驶员方向盘转角输入下控制载荷转移率在某一水平以下实现[5].其中线控转向技术是主动转向领域的一个热点.Nam提出通过线控转向系统来实现横摆稳定性控制.其中包括一个内环控制器通过补偿转向角来防止转向干扰输入和一个外环路径控制器来实现稳定性控制[6].紧急调头、双移线等工况都可以检验侧翻[7-8].
为了研究侧翻问题,可以通过主动线控转向系统实现.但是纯仿真虚拟环境对于汽车来说,又不能真实反应汽车侧翻动力学特性.硬件在环(Hardware-in-the-loop, HIL)半实物仿真技术能在“虚拟车辆”中模拟汽车各种行驶工况,对实物硬件进行大量测试,而无需真实的车辆,因此是测试汽车电子控制器的一种理想实验工具[9-11].同时,硬件在环测试技术的关键还在于对硬件的真实性构建,已有一些研究进行了转向加载的模拟[12-14].
综上,为了深入研究汽车侧翻问题,通过线控主动转向系统,利用硬件在环技术进行研究是一套行之有效的方法.但是目前多是通过对横拉杆处简单加载或成本较高的驾驶模拟器等实现,本文创新性将纺织业使用的磁粉制动器用于转向模拟主销处加载,可以实现实时跟随加载,更加接近实际动力学特征.首先设计和开发了面向侧翻的主动线控转向硬件在环实验实验管理平台结构,通过实时软件模型、实验管理软件和硬件平台实现;在转向角脉冲、角阶跃、紧急调头、双移线和蛇形典型紧急转向工况下,对仿真和实验结果进行了比较.
1 HIL实验管理平台结构
作为具有低成本优势的硬件在环实时仿真试验技术已成为研究热点.为了实现硬件在环实验管理,需要在Labview中建立与硬件平台通讯的接口.图1所示为面向侧翻的主动线控转向HIL实验管理平台结构.主要包括整车仿真模型、控制、台架执行和数据采集模块.相互之间的逻辑关系明确,如图1.

图1 HIL实验平台结构
2 线控主动转向侧翻试验台
试验台由三部分组成:实时软件模型、实验管理软件和硬件平台[9].实时软件模型为整车仿真模型,实验管理软件为LabVIEW,硬件平台由转向器、电机控制器、磁粉制动器、张力控制器、转向电机、通信板块、传感器和其他机械机构组成.
2.1 实时软件模型
根据电动小车的整车参数和侧倾弹性特性参数,建立了包含侧翻自由度的整车模型,可以通过设立整车转向工况来验证该车的侧翻稳定性能.
2.2 实验管理软件
采用虚拟仪器测试软件LabVIEW作为实验管理软件[10].如图2为LabVIEW实验程序实现框图,包括转向电机控制、磁粉制动器控制、转向载荷转移(LTR)控制和位移传感器输入模块.

图2 LabVIEW实验程序实现框图
2.3 硬件平台
硬件平台主要由转向部分(转向电机、转向器),转向阻力模拟加载部分(主销轴、减速器、磁粉制动器),信号采集部分(齿条位移传感器、板卡)以及各部分机械机构组成,如图3所示.
转向阻力模拟加载通过工业用磁粉制动器及张力控制器实现,如图4所示.
利用一个位移传感器PM-75测量转向横拉杆齿条的实时位移,并设计可以实现精调和粗调的位移传感器夹具,如图5所示.

图3 转向试验台图

图4 转向模拟加载装置

图5 转向横拉杆齿条位移传感器及夹具
2.4 侧翻控制原理
没有转向时左右轮的垂直载荷近似相等.当发生转向时,左右轮垂直载荷转移,侧倾动力学模型如图6所示.

图6 侧倾动力学模型
图中,Fs1y为前轴悬挂质量受到的惯性力;FΦr1为前悬挂受到的侧倾力矩.
侧倾程度可以用载荷转移率LTR反映,记作r,即
(1)
(2)
通过式(1)—式(2)得到
(3)
式中:ΔFz1l为左前轮垂直载荷变化;Fz1l为左前轮垂直载荷;Fsy为汽车悬挂质量部分受到的惯性力;Fu1y为前轴非悬挂质量受到的惯性力;B1为轮距;bs为后轴到质心的距离;L为轴距;h1为前轴侧倾中心的高度;hu1为前轴非悬挂质量质心离地高度;Kφr1为前悬刚度;Cφr1为前悬阻尼;φr为车身侧倾角;ms1为前悬挂质量;mu1为前非悬挂质量;ay为侧向加速度.
如果车身侧倾趋势增大,r将会变大.r接近1,意味着侧倾到达一个临界状态,可采用一个PID控制算法,文献[15]已给出,这里不再赘述.
3 汽车侧翻转向试验验证
为了验证该线控主动转向试验台架在转向侧翻工况下的适用性,在转向角脉冲、角阶跃、紧急调头、双移线和蛇形典型紧急转向工况下,对仿真和实验结果进行了比较.仿真模型见文献[15].
3.1 75°方向盘角脉冲实验
在车速为60 km·h-1,方向盘75°的角脉冲工况测量车身的侧倾角的仿真与实验如图7,可以看出,两种结果非常相近,说明了该试验台架对角脉冲侧翻实验的适用性.
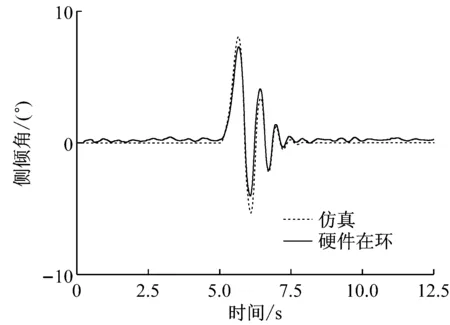
图7 角脉冲工况
3.2 25°方向盘角阶跃实验
在方向盘角阶跃为25°,车速45 km·h-1的工况下测量车身的侧倾角的仿真与实验如图8,可以看出,两种结果相近,在特征峰值处实验和仿真变化趋势相近但有微小差别,可能是由于台架的惯量所致;在后期仿真与实验结果有较大差异,说明了该试验台架在角阶跃侧翻实验需要进一步优化.

图8 角阶跃工况
3.3 20 km·h-1车速紧急调头实验
在车速为20 km·h-1紧急调头工况下测量车身的侧倾角的仿真与实验如图9所示,两种结果非常相近,说明了该试验台架对于紧急调头侧翻实验的适用性.
3.4 80 km·h-1车速双移线实验
在车速为80 km·h-1的双移线工况下测量车身的侧倾角的仿真与实验如图10所示,两种结果相近,在特征峰值处实验和仿真变化趋势相近但有微小差别,可能是高速下的响应时间问题,说明了该试验台架在高速双移线侧翻实验需要进一步优化.

图9 调头工况

图10 双移线工况
3.5 70 km·h-1车速蛇形实验
在车速70 km·h-1蛇形工况下测量车身的侧倾角的仿真与实验如图11所示,两种结果非常相近,说明了该试验台架对于蛇形实验的适用性.
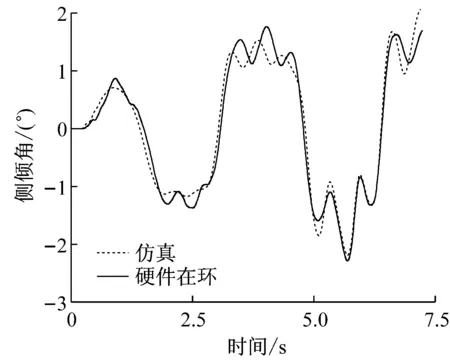
图11 蛇形工况
4 结论
对面向侧翻试验的线控主动转向电动小车台架进行了研究,得到如下成果和结论:
(1)构建了用于侧翻试验的线控主动转向电动小车实验台架,包括建立了实时整车仿真模型、实验管理软件和硬件平台.
(2)硬件平台主要由转向部分(转向电机、转向器),转向阻力模拟加载部分(主销轴、减速器、磁粉制动器),信号采集部分(齿条位移传感器、板卡)以及各部分机械机构组成.
(3)分别在角脉冲、角阶跃、紧急调头、双移线和蛇形工况下,对仿真和实验结果进行了比较,两种结果相近,说明了该试验台架对于侧翻实验的适用性.仅在角阶跃和高速双移线工况有较小差异,可能是由于台架的惯量和高速下的硬件响应时间问题,可以通过后期的算法优化、硬件进一步调试来解决.
[1] 米奇克. 汽车动力学[M]. 北京:人民交通出版社, 1992.
Mitschke. Vehicle dynamics[M]. Beijing: China Communications Press, 1992.
[2] 余志生.汽车理论[M].北京:机械工业出版社,2012.
YU Zhisheng.The theory of automobile[M].Beijing:China Machine Press,2012.
[3] Imine H, Fridman L M, Madani T. Steering control for rollover avoidance of heavy vehicles[J]. IEEE Transactions on Vehicular Technology, 2012, 61(8):3499.
[4] Larish C, Piyabongkarn D, Tsourapas V,etal. A new predictive lateral load transfer ratio for rollover prevention systems[J]. IEEE Transactions on Vehicular Technology, 2013, 62(7):2928.
[5] Solmaz S, Corless M, Shorten R. A methodology for the design of robust rollover prevention controllers for automotive vehicles with active steering[J]. International Journal of Control, 2007,80(11): 1763.
[6] Nam K, Oh S, Fujimoto H,etal. Robust yaw stability control for electric vehicles based on active front steering control through a steer-by-wire system[J]. International Journal of Automotive Technology, 2012, 13(7):1169.
[7] 褚端峰,李刚炎.半主动悬架汽车防侧翻控制的研究[J].汽车工程,2012,34(5): 399.
CHU Duanfeng, LI Gangyan.Research on anti-rollover control for vehicles with semi-active suspension[J].Automotive Engineering, 2012, 34(5): 399.
[8] 潘盛辉,张兴达,王娜.基于差动制动的SUV防侧翻控制仿真研究.计算机仿真,2013,30(6): 174.
PAN Shenghui, ZHANG Xingda, WANG Na.Research on simulation of vehicle anti-rollover control based on differential braking.Computer Simulation,2013,30(6): 174.
[9] 李静, 王子涵, 余春贤,等. 硬件在环试验台整车状态跟随控制系统设计[J]. 吉林大学学报:工学版, 2013, 43(3):577.
LI Jing,WANG Zihan,YU Chunxian,etal. Design of control system to follow vehicle state with HIL test bench[J]. Journal of Jilin University: Engineering and Technology Edition, 2013, 43(3):577.
[10] 郑尧军,陈开考,骆美富.自动变速器实验台测控系统的研究[J]. 机电工程, 2009, 26(7):19.
ZHENG Yaojun, CHEN Kaikao, LUO Meifu. Research of computer detection and control system on auto transmission laboratory[J]. Mechanical Electrical Engineering Magazine, 2009,26(7):19.
[11] 赵玲, 孙仁云. 虚拟仪器技术在汽车测试技术实验中的应用[J]. 实验科学与技术, 2006, 4(2):20.
Zhao Ling, Sun Renyun. Application of virtual instrument technology in automobile test technology experiment[J]. ExperimentScience and Technology, 2006, 4(2):20.
[12] 刘冰. 汽车线控转向系统硬件在环试验台研究与开发[D].长春:吉林大学,2008.
Liu Bing. Research and development of the hardware-in-the-loop test bench for steer-by-wire system[D]. Changchun: Jilin University, 2008.
[13] 解后循, 高翔, 夏长高. 基于LabVIEW软件的电动液压助力转向台架测控系统设计[J]. 重庆交通大学学报:自然科学版, 2015(3):162.
XIE Houxun, GAO Xiang, XIA Changgao.Measurement and control system design of electro-hydraulic power steering system test bench based on LabVIEW[J]. Journal of Chongqing Jiaotong University: Natural Science,2015(3):162.
[14] 刘军, 穆桂脂, 罗石,等. 线控转向硬件在环系统设计[J]. 机械设计与制造, 2009(3):232.
LIU Jun, MU Guizhi, LUO Shi,etal.Design of the hardware-in-the-loop simulation system for SBW[J]. Machinery Design and Manufacture, 2009(3):232.
[15] 王阳阳, 付涛, 邓纤离,等. 线控转向汽车防侧翻稳定性控制[J]. 计算机辅助工程, 2015, 24(5):28.
WANG Yangyang, FU Tao, DENG Xianli,etal. Anti-rollover stability control for steer-by-wire car[J]. Computer Aid Engineering,2015,24(5): 28.
Test Bench Construction of Active Steer-by-wire for Rollover Research
WANG Yangyang1,2, PAN Ding2, LI Wei3, FU Tao4
(1. Clean Energy Automotive Engineering Center, Tongji University, Shanghai 201804, China; 2. College of Automotive Studies, Tongji University, Shanghai 201804, China; 3. College of Electrical Engineering, Tongji University, Shanghai 201804, China; 4. Zhejiang Geely Automobile Research Institute, Hangzhou 317000, China)
In order to study the rollover control through active steer-by-wire system, a suitable test bench was requested. First, a hardware-in-the-loop experiment platform structure of active steer-by-wire for rollover was analyzed. The vehicle model, experiment management software and hardware platform were established. The hardware platform was composed of steering system, torque simulation loading device with magnet brake and data acquisition device. On the condition of 75° steering wheel angle of pulse test, 25° steering wheel angle of step test, 20 km·h-1speed of J-turn test, 80 km·h-1speed of double lane change test and 70 km·h-1speed of snake test rollover angle of vehicle body which was used to characterize roll degree in the simulation and experiment were monitored. Results of which are close to each other. It indicates the applicability of the test bench for the rollover test.
vehicle rollover; active steer-by-wire; hardware-in-the-loop; magnet brake
2015-08-21
2015中央高校交叉学科项目;2016同济大学优秀项目
王阳阳(1980—),女,副教授,工学博士,主要研究方向为汽车系统动力学与控制.E-mail:wyangyang@tongji.edu.cn
U46
A
猜你喜欢
现代仪器与医疗(2022年3期)2022-08-12
汽车之友(2021年23期)2021-12-24
化工自动化及仪表(2021年6期)2021-11-26
装备制造技术(2020年11期)2021-01-26
制造技术与机床(2019年6期)2019-06-25
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年9期)2018-08-04
天津教育·下(2018年9期)2018-07-13
汽车工程师(2018年3期)2018-07-12
自动化仪表(2017年8期)2017-08-30
