亚像素边缘定位算法过滤噪声的分析
2016-11-23 00:50田原嫄谭庆昌
东北电力大学学报 2016年5期
田原嫄,谭庆昌
(1.东北电力大学 机械工程学院,吉林 吉林 132012;2吉林大学 机械科学与工程学院,长春 130022)
亚像素边缘定位算法过滤噪声的分析
田原嫄1,谭庆昌2
(1.东北电力大学 机械工程学院,吉林 吉林 132012;2吉林大学 机械科学与工程学院,长春 130022)
针对噪声对图像边缘检测等过程带来的极大干扰,严重地影响了图像质量的问题,研究图像中普遍存在的白噪声对边缘定位精度的影响尤为重要。采用一维灰度矩法与二次多项式插值亚像素边缘定位算法进行比较分析,分别讨论两种算法在同一偏移量、不同信噪比的情况下,噪声对边缘定位精度的影响。实验结果表明,在对受噪声影响的图像进行边缘检测时,一维灰度矩法更能够有效地抑制噪声,保护边缘细节,提高检测精度,具有不可忽视的理论价值。
边缘检测;定位精度;噪声;信噪比;点扩散函数
边缘检测在图像处理和模式识别中发挥着重要的作用,图像边缘表达图像的基本形状,包含图像的主要特征信息。经典的边缘检测方法(如Robert[1]算子、Sobel算子[2]、Prewitt算子[3]、Laplacian算子等[4])由于引入了各种形式的微分运算,故这些方法对噪声敏感,抗噪性能偏差[5]。一般来讲,一个好的边缘检测算法应满足以下要求:(1)检测精度高;(2)抗噪能力强;(3)计算简单;(4)便于并行实现。边缘的定位有两点需要考虑:(1)所得到的边缘是多像素还是单像素,如果是多像素的,在以后的工作中还必须加上细化才可以确切地得到边缘方向,从而其精度由边缘检测算法和细化算法共同确定;(2)考虑其误检率和漏检率。有的边缘算法已经包含了连接,它所得到的边缘图像是连续的,如LOG[6]算法,而其他的某些算法并不能连接。因此,边缘不连续,漏检就比较多。噪声对图像的干扰严重地影响了图像的质量,给图像边缘检测等过程带来了极大的困难。图像噪声类型较多,椒盐噪声和高斯噪声是两类常见的图像噪声,不少图像降噪方法都能较好地滤除椒盐噪声,而滤除高斯噪声或混合噪声就相对较差,随着噪声强度的增加消噪能力更差。如果对这类图像进行边缘检测,会损失很多图像细节,检测效果很不理想。因此,在图像处理中一个非常重要的问题就是对图像中所混有噪声的滤除。边缘检测的基本问题是检测精度与抗噪性能之间的矛盾,由于图像中普遍存在噪声,而图像边缘和噪声均为频域中的高频分量,这给边缘检测带来了困难,为此人们做了许多研究[7-8]。文献[9]作者发现对外科手术机器人的视觉系统设计中,相机畸变和图像中的噪声是两个主要因素,启发我们可以从这两方面着手得到高精度的标定技术。因此,本文利用两种亚像素边缘定位法,即一维灰度矩法与多项式插值法分别讨论了两种算法在不同信噪比、不同偏移量情况下和同一种算法在同一信噪比情况下,噪声对边缘定位精度的影响。在对受噪声影响的图像进行边缘检测时,能够有效地抑制噪声,保护边缘细节,提高检测精度,具有不可忽视的理论价值。
(1)
1 镜头模型的建立及量化
1.1 镜头模型
本文所用的光学镜头为圆形工业定焦镜头,它的无像差成像可以用圆形孔径的夫琅和弗衍射求出[10]。圆孔的透过率函数为
(2)
(3)


(4)
或简写成:
(5)
对于CCD照相机而言,z为有效焦距f,即从镜片中心到CCD成像平面的距离。为采集到清晰的图像,需要调节光圈的大小,孔径d不易求得,而镜头的F数可以通过标识读取,所以将公式(5)进行转换。
(6)
那么,一维情况下的衍射光强分布为

(7)
由于上面的推导假设入射光为单位振幅的单色平面波,所以公式(5)也就是常说的镜头点扩散函数(Point Spread Function)。在本文中,λ=550 nm,F=4,那么根据面积法归一化后的一维点扩散函数为

(8)

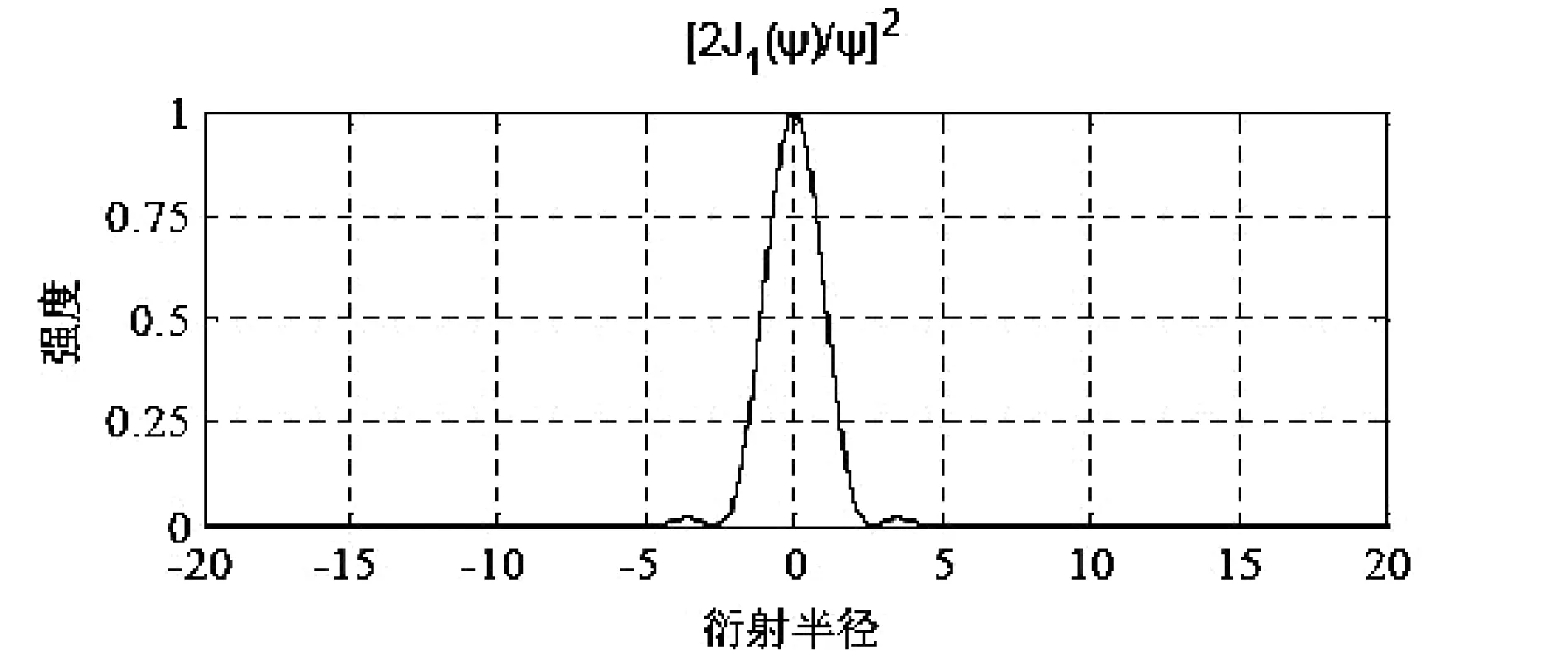
图1 点扩散函数一维图
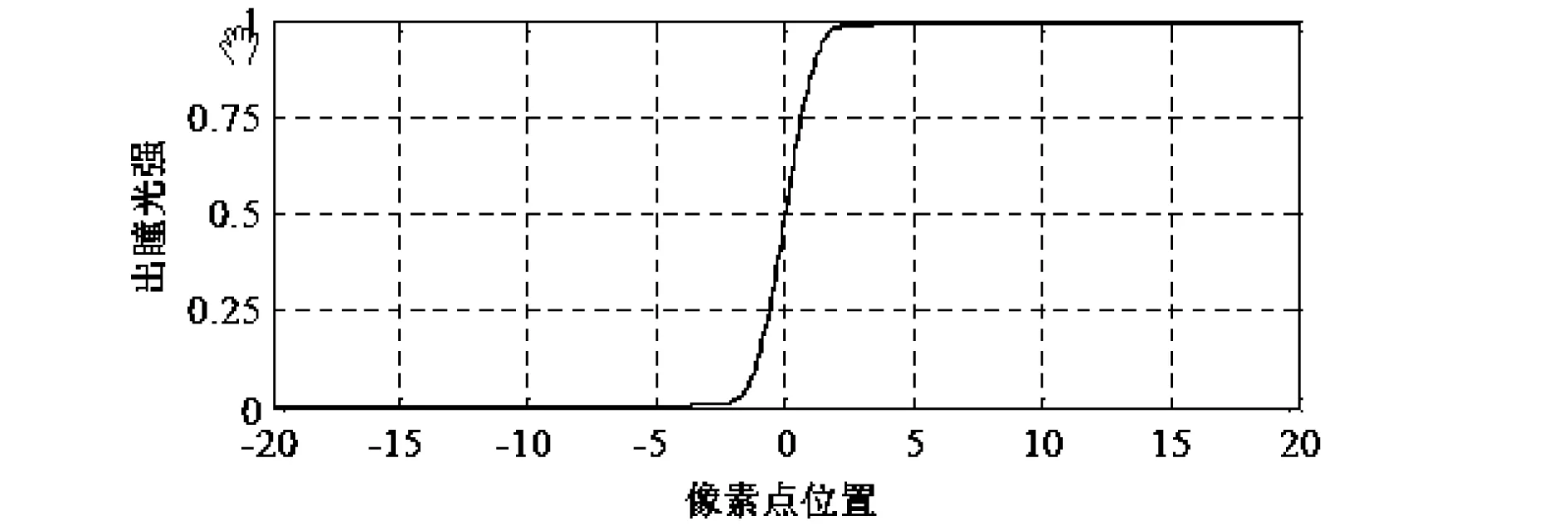
图2 CCD相机成像平面上接收到的光场分布函数
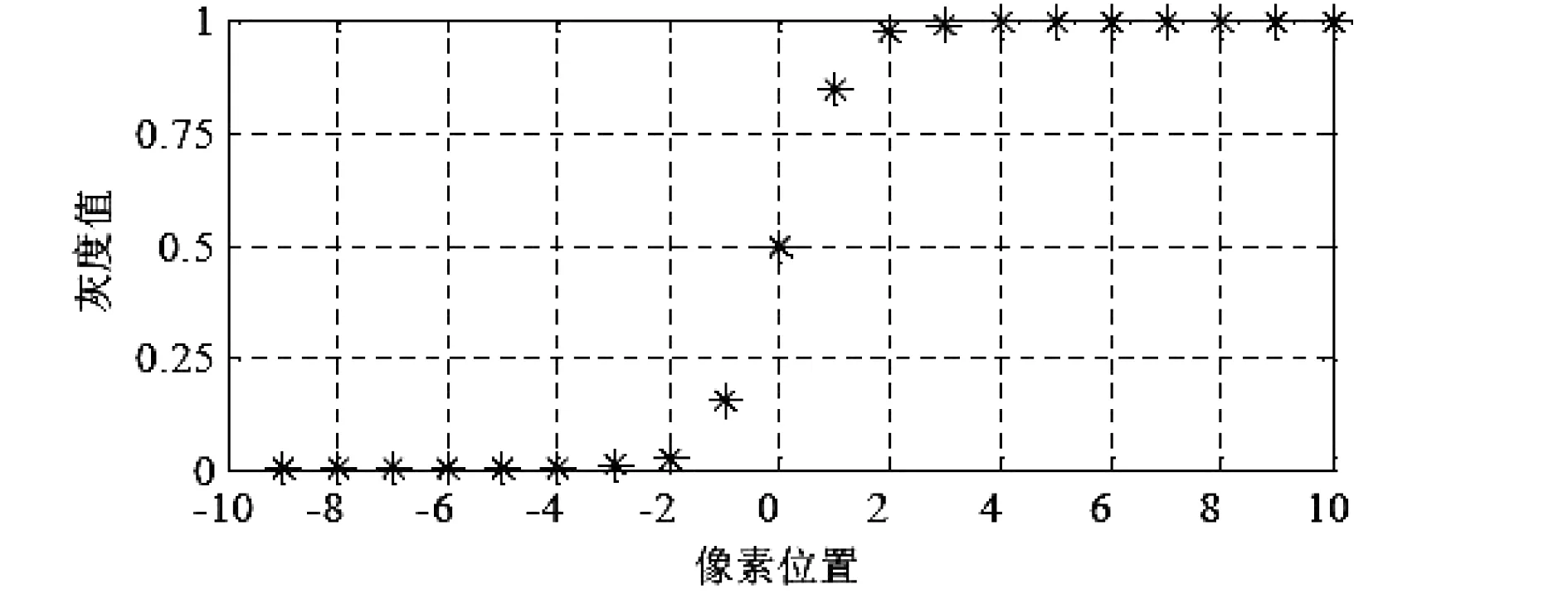
图3 离散的边缘灰度分布图
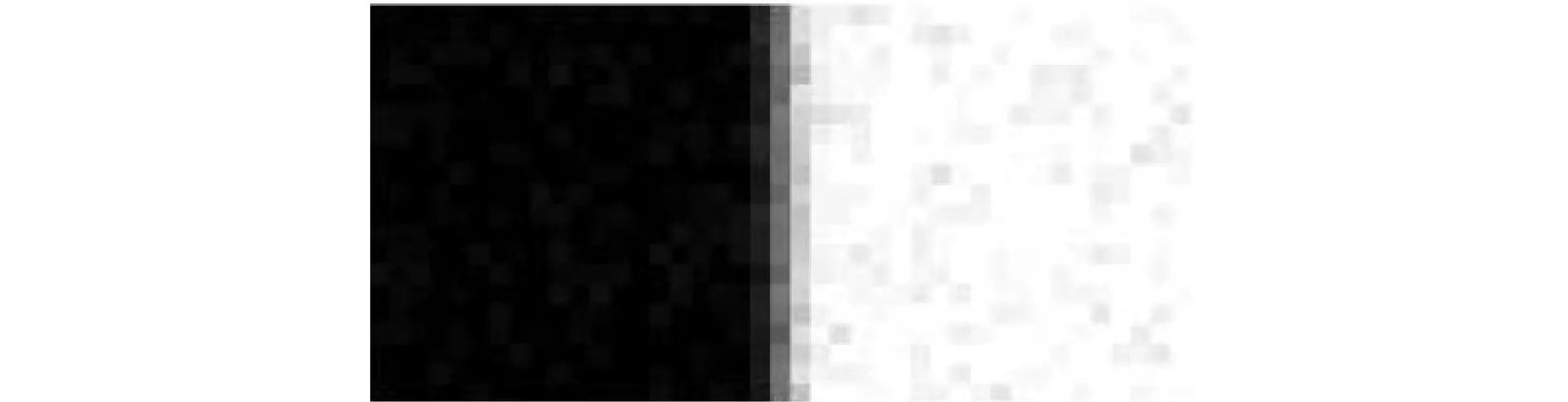
图4 含有SNR=30dB的高斯白噪声的图像(41×20)

(9)
1.2 量化

(10)
得到的离散化的边缘模型如图3所示。
1.3 随机噪声
通过对上面得到的一维离散数据添加不同信噪比的高斯白噪声,再对这些数据进行处理,以评价算法在不同信噪比水平下的鲁棒性。加了信噪比(SNR)为30dB的高斯白噪声后的图像,如图4所示。
2 两种亚像素边缘定位算法
2.1 一维灰度矩亚像素边缘定位算法
基本原理是假设实际图像中的实际边缘分布理想阶跃边缘模型的灰度矩保持一致,即矩不变原理。通过此关系来确定实际边缘的位置,一维理想阶跃边缘模型可以认为是有一系列具有灰度h1与一系列具有灰度h2的像素相接而构成的。这样的模型就可以用三个参数来确定:边缘位置k、边缘两侧的灰度值h1和h2。

(11)
假设p1和p2分别表示灰度值为h1和h2的像素点数在整个边缘上所占的比例,则两者满足如下关系:
p1+p2=1 ,
(12)


(13)
上述三个方程中包含三个未知数p1、h1和h2,求解可得:

(14)

(15)

(16)

(17)
2.2 二次多项式插值亚像素边缘定位算法




(18)
(19)
其中:xi为插值基点;yi为函数值。
(20)

(21)

(22)
如果公式(21)和公式(22)同时成立,则上述亚像素定位算法理论可获得较高的边缘定位精度。
3 基于两种边缘定位法分析噪声对定位精度的影响
(1)在每个给定的信噪比(SNR)水平下,将理想的边缘移动一小位移(小于1pixel),并用上述两种亚像素边缘定位法分别测量。在本次试验中,我们移动的小距离1/100个像素,然后将理想边缘的位置从i移动到i+1并记录每次理想边缘移动后的边缘位置测量值。
(2)对于在给定信噪比(SNR)水平下的每次移动,我们都用最优滤波算子——中值滤波法对图像进行平滑处理,然后用上述两种算法对平滑后的边缘进行亚像素边缘位置的测量。
(3)本文通过计算给定信噪比水平下每次移动的边缘位置测量误差的标准差(STD)来测定每种算法的分辨率精度。当然测定算法分辨率精度的方法并不唯一,本文选择计算误差的STD来测定主要是因为这种方法更能直观的比较不同算法的分辨率精度。
(23)
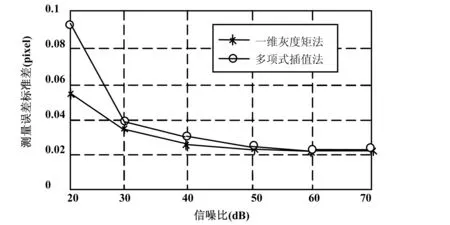
图5 边缘定位误差标准差与信噪比的关系图
本文实验中SNR取值为20 dB、30 dB、40 dB、50 dB、60 dB和70 dB六个不同级别的噪声水平。在偏移量不变、信噪比不同情况下,每种算法在位移量为0.01pixel时,边缘定位误差的标准差与信噪比的关系绘制曲线如图5所示。
4 结 论
(1)一维灰度矩和二次多项式插值亚像素边缘定位法在任何信噪比水平下均不能达到0.01个像素精度;
(2)在信噪比SNR≥30 dB时,本文两种方法均不能达到0.02个像素的分辨率精度;
(3)本文两种方法在信噪比SNR≥30 dB时的分辨率精度均能达到0.05个像素;
(4)本文两种方法对噪声比较不敏感,尤其是当信噪比SNR<40 dB时;
综上所述可知,一维灰度矩和二次多项式插值亚像素边缘定位算法在高信噪比SNR≥40 dB时的边缘定位性能相近,而在低信噪比SNR<40 dB时,一维灰度矩法比二次多项式插值法的边缘定位性能要好。
[1] 李树强.基于Roberts算子的牡丹红斑病叶病斑边缘检测方法比较[J].经济林研究,2014,32(1):144-149.
[2] 来国红,王春宁,刘嵩.基于DSP的Sobel算子边缘检测算法的实现[J].湖北民族学院学报:自然科学版,2015,33(1):48-49.
[3] 方惠蓉.基于FPGA的Prewitt边缘检测算子的实现[J].哈尔滨师范大学:自然科学学报,2015,31(2):72-76.
[4] 徐建华.图像处理与分析[M].北京:科学出版社,1992:47-98.
[5] 曾欢,王欢.图像边缘检测算法的性能比较与分析[J].现代电子技术,2006,29(14):53-55.
[6] 龙鹏,鲁华祥.LOG边缘算子改进的加权引导滤波算法[J].计算机应用,2015,35(9):2661-2665.
[7] 陈虎,凌朝东,张浩,等.基于FPGA的实时彩色图像边缘检测算法的实现[J].液晶与显示,2015,30(1):143-150.
[8] 苗天一,石志标.液体管道泄漏的流场模拟与空包噪声分析[J].东北电力大学学报,2013,33(3):35-37.
[9] Jian-hua Wang,Fan-huai Shi,jing Zhang,et.al.A new calibration model of camera lens distortion[J].Pattern Recongnition,2008,104(41):607-615.
[10] Antonin Miks,jiri Novak,Pavel Novak.Calculation of point-spread function for optical systems with finite value of numerical aperture[J].Optik-International Journal for Light and Electron Optics,2006,118(11):537-543.
Filter Noise Analysis Based on Sub-pixel Edge Orientation Algorithm
TIAN Yuan-yuan1,TAN Qing-chang2
(1.School of Mechanical Engineering,Northeast Dianli Universty,Jilin Jilin 132012;2.Mechanical Science and Engineering College,Jinlin University,Changchun 130022)
Noise interference with image impacts on image quality severely.It brings great difficult for the course of image edge detection.So an important problem during image process is to research precise of edge orientation affected by noise.In the paper,there methods of sub-pixel edge orientation such as 1-dimention gray moment algorithm,Gauss fitting method and polynomial interpolating method are used.The paper discussed affection of edge orientation precise by noise under two conditions respectively.One is that SNR and displacement are different using above there methods.The other is that the same SNR using the same method.The research in this paper is greatly valuable in order to restrain noise availably,protect edge details and improve detection precise when edge detection of image is affected by noise.
Edge detection;orientation precise;Noise;Signal to noise ratio(SNR);Point spread function
2016-03-10
田原嫄(1979-),女,吉林省长春市人,东北电力大学机械工程学院副教授,博士,主要研究方向:三维图像测量技术.
1005-2992(2016)05-0043-05
TP391.4
A
猜你喜欢
数学物理学报(2022年5期)2022-10-09
北京航空航天大学学报(2022年6期)2022-07-02
现代仪器与医疗(2022年1期)2022-04-19
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年1期)2021-03-29
天津医科大学学报(2021年1期)2021-01-26
应用数学(2020年2期)2020-06-24
北京航空航天大学学报(2019年9期)2019-10-26
雷达学报(2017年3期)2018-01-19
自动化学报(2017年5期)2017-05-14