永磁同步电机的模糊控制研究
2016-11-30 03:16苏鸣翰
鞍山师范学院学报 2016年4期
苏鸣翰
(香港科技大学 电子工程系,香港 九龙清水湾)
永磁同步电机的模糊控制研究
苏鸣翰
(香港科技大学 电子工程系,香港 九龙清水湾)
永磁同步电机(PMSM)采用传统PID控制器时,在面对特定参数的情况下,控制系统能够取得良好的控制效果.但当系统参数发生变化时,需要对PID控制器进行重新设计,使其适应各种情况.为了解决这个问题,本文提出了一种新型的模糊PID控制器,它可以随时调节PID参数,对比例、积分、微分环节进行自调整,使得永磁同步电机能够快速跟踪输出量.通过仿真实验表明,模糊PID控制器具有响应速度快、稳定精度高等优点.
永磁同步电机;PID控制器;模糊控制
1 模糊逻辑控制
模糊逻辑控制(Fuzzy Logic Control)简称模糊控制(Fuzzy Control),是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术[1].1965年,美国控制理论专家L.A.Zadeh建立了模糊集合理论,首先提出了模糊集合的概念.70年代,E.H.Mamdani博士将一系列语句加入到模糊控制器,并将它应用到具体的机械控制中,获得了极大的成功.由此模糊控制理论逐渐成为人们日益关注的焦点.
2 模糊PID控制原理
模糊控制器主要由4部分组成:模糊化、知识库、模糊推理和反模糊化.其控制原理框图如图1所示.
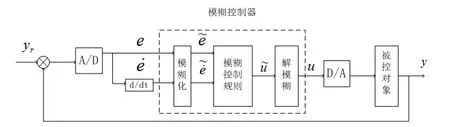
图1 模糊控制原理框图
模糊控制器首先要进行模糊化运算,将输入的观测量转换为输入论域的模糊集合,其中,需要对输入变量进行尺度变换,然后映射到相应的论域范围.在得到变量在论域中的映射量后,需要运用数据库和规则库中的知识进行模糊推理.模糊控制的核心就是一系列语句描述的控制规则.例如“如果...则...(if...then...)”语句,其中if语句被称为条件部分,是由被控量组成的命题;then语句被称为结论部分,是用来描述控制量的命题.模糊推理就是通过这些专家知识或经验来控制被控系统,得到模糊控制量.得到这些量后,还必须对它们进行反模糊化处理,将通过上一步得到的模糊量转换为实际进行控制的准确量,这包括将模糊量转换为论域中的准确量和将准确量经放大或缩小后得到的用来控制电机的控制量.与传统的PID控制相比,模糊PID控制具有如下优点:
(1)使系统设计变得简单,适用于非线性控制;
(2)不依赖于被控对象的数学模型;
(3)鲁棒性强,对被控对象变化不敏感;
(4)模糊控制器易于纠错和掌握.
3 模糊PID控制器的设计
PID控制具有结构简单、稳定性高、可靠性好等特点,目前很多控制器仍采用PID控制策略,而如何确定PID的参数便是PID控制策略的关键.传统PID控制中,人们是以电机的数学模型为基础,根据某些原则对参数进行整定.而实际操作中,许多控制系统结构复杂,具有高度非线性,模型也在不断地变化,某一条件下整定的参数在另一条件下很可能不适用.这就要求在现代控制系统中,PID的参数能随着对象模型的变化而变化.
模糊PID控制器利用人工智能的方法,将专家或操作员的理论或经验作为知识储存起来,并建立起知识库,根据被控对象实际运行中的情况,能够通过计算机自动调节PID的参数,实现对系统的最佳控制.本文设计的模糊PID控制器结构如图2所示.

图2 模糊PID控制器结构图
模糊PID控制器由一个普通PID控制器和一个模糊推理模块构成.根据输入信号的大小,自动调节PID的参数KP,KI和KD,以获得最佳调节效果,以下为模糊PID控制器设计的具体步骤.
3.1 精确量的模糊化
在本次设计中,将偏差E最大值设为0.1,即百分之十.通过调节比例系数k使偏差E的实际取值范围为[-3,+3],偏差所取的模糊集论域为[-3,+3],模糊量化因子k1=3/0.1=30.这7个量化等级的语言集合为{NB,NM,NS,ZO,PS,PM,PB}.从模糊理论的发展来看,输出量的隶属度函数可以采用梯形、吊钟型和三角形.但为了简化计算,人们采用三角形函数,偏差E隶属度函数如图3所示.
同理,偏差变化率EC,PID参数KP、KI、KD隶属度函数分别如图4~7所示.
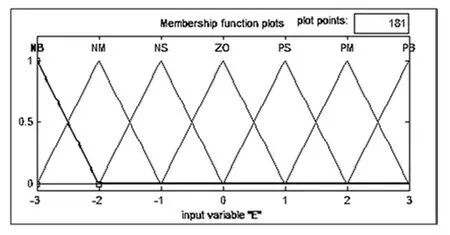
图3 偏差E隶属度函数

图4 偏差变化率EC隶属度函数
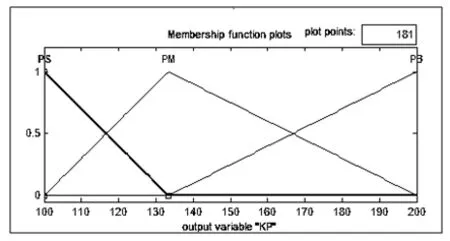
图5 KP隶属度函数

图6 KI隶属度函数

图7 KD隶属度函数
3.2 建立模糊控制规则
模糊控制规则建立的原则是完备性和一致性,即要求规则涵盖所有可能出现的条件,且在给定输出的情况下,不允许产生2组不同的输出.在满足上述条件的要求下,还要求使模糊条件的数量尽量少,使模糊控制器的结构尽量简单.
控制量变化的原则是当误差较大时,应以及时使误差变小为首要因素;而遇到小误差的情况时,应注意不要使系统超调量太大,使系统保持平稳.KP、KI、KD的调整规则分别如表1~3所示.

表1 KP调节规则
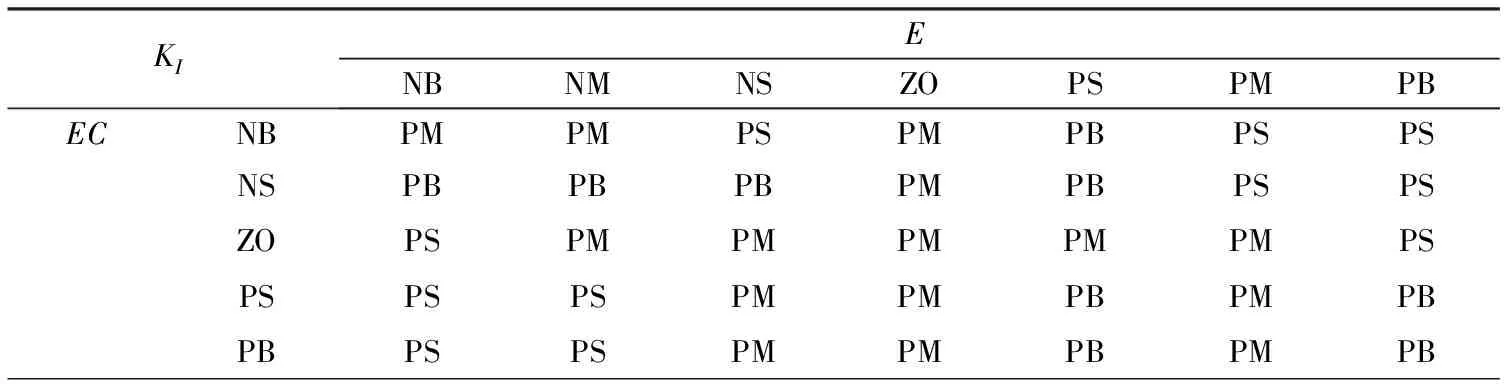
表2 KI调节规则
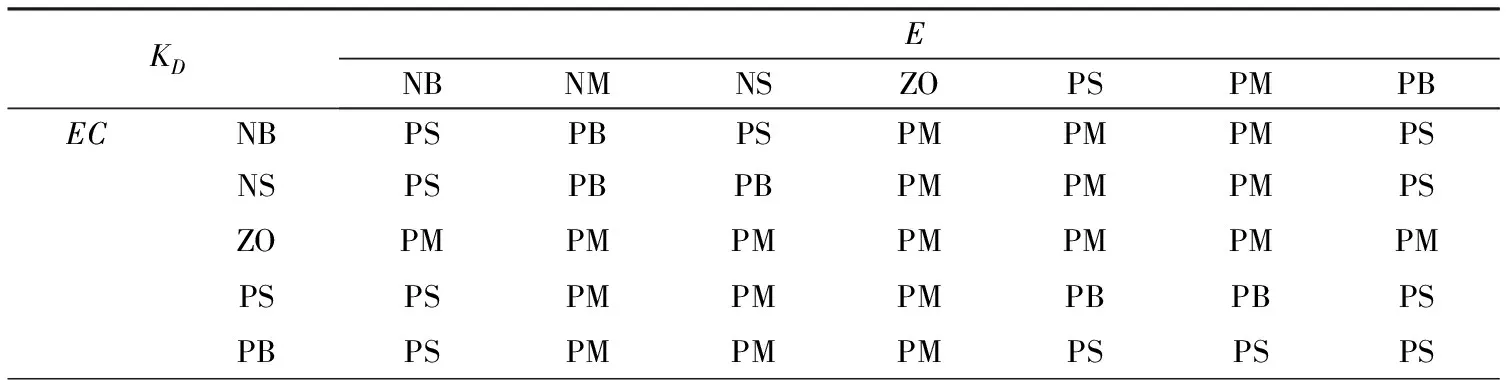
表3 KD调节规则
4 模糊PID控制器的仿真
采用Simulink对永磁电机的模糊控制进行仿真,仿真原理图如图8所示.
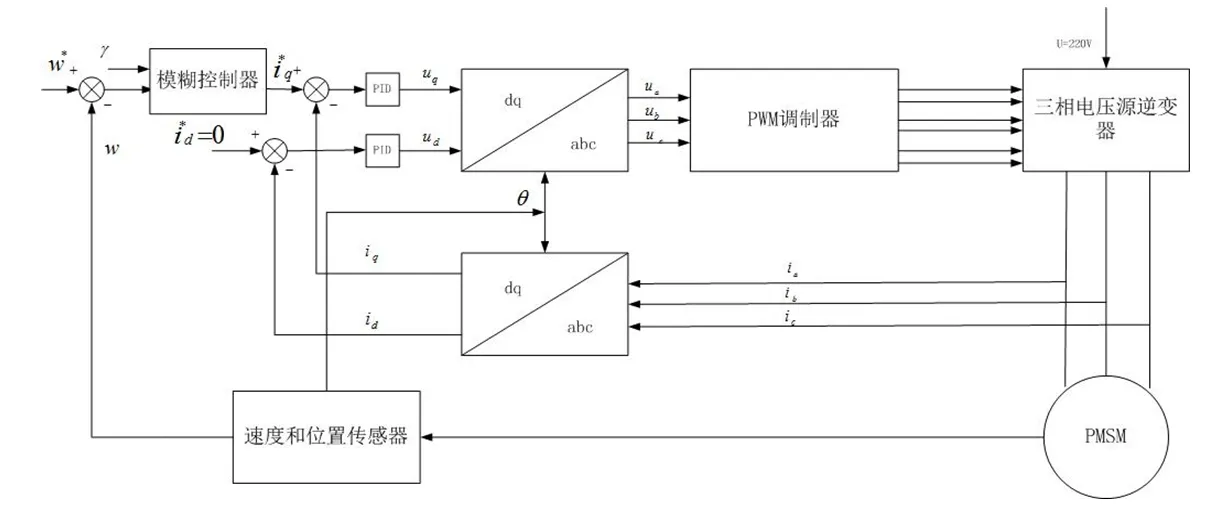
图8 基于模糊PID控制的永磁同步电机控制系统
模糊PID控制与传统PID仿真模型基本相同,增加了模糊控制模块,模糊控制模块如图9所示.

图9 模糊控制模块
其中,“Fuzzy Logic Controller”为MATLAB自带的模糊控制器,运行时直接调用已经编辑好的模糊规则;“Saturation”饱和度模块,用来限制最大输出,防止超调;K为调节系数,将误差E、误差变化率EC转换到输入论域中.永磁同步电机模糊控制系统仿真结构图如图10.

图10 模糊PID控制系统仿真结构图
其中,电机模块采用永磁同步电机,其具体参数为:
定子电阻Rs=2.875 Ω,定子电感Ld=Lq=L=0.001 35 H,转子磁链ψf=0.175 Wb,转动惯量J=0.008 kg·m2,极对数P=2,额定转速n=1 500 r/min.速度控制器比例系数KP=100,积分系数KI=3,微分系数KD=0.005,电流控制器比例系数KP=10,KI=4.给定转速n=1 500 r/min,t=0时,负载转矩为-10 N·m,t=0.03 s时,负载转矩变为10 N·m,总仿真时间为0.1 s.
仿真结果与传统PID仿真结果对比见图11~14.

图11 传统PID控制转速响应曲线
图12 模糊PID控制转速响应曲线
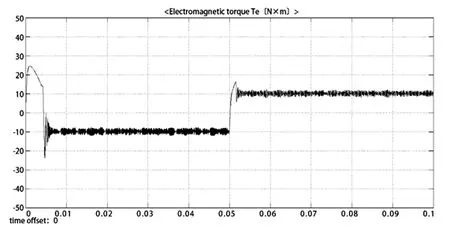
图13 传统PID控制转矩响应曲线
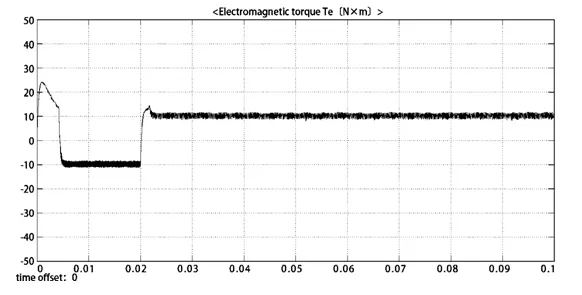
图14 模糊PID控制转矩响应曲线
从以上结果可以看出,采用模糊PID控制方法,控制效果相比传统PID控制有了很大的改善:首先,模糊PID控制的调节时间要小于传统PID控制;其次,模糊PID控制几乎没有超调量;最后,在发生扰动时,模糊PID恢复原运行状态的时间短,抗干扰性能较强.
5 总结与展望
本文介绍了模糊控制的基本原理,研究了模糊PID控制器的设计与仿真.结果表明模糊PID控制在调节时间、控制超调量等方面都优于传统PID控制器,且在电机参数变化时调节快,鲁棒性更强.
在对永磁同步电机的控制方面,模糊控制也可以和其它控制策略一起使用,如预测控制等,如何有效地将对电机参数的估计和模糊控制结合使用仍是未来的重点研究方向.
[1] 李士勇.模糊控制[M].哈尔滨:哈尔滨工业大学出版社,2011.
[2] 张池.永磁同步电机模糊控制方法研究[J].武汉工业学院学报,2011,30(1):63-66.
[3] 吴茂,刘铁湘.空间矢量脉宽技术研究[J].现代电子技术,2006(8):127-128.
[4] 田明秀.永磁同步电动机的模糊神经网络控制方法研究[D].沈阳:沈阳工业大学,2006.
[5] 张涛.交流同步伺服电机模糊PID参数自整定矢量控制系统研究[D].合肥:合肥工业大学,2012.
[6] 梁迎春,吴海涛,林益平.永磁同步电动机研究现状评述[J].微电机,2007,40(11):51-55.
[7] 龙明贵.永磁同步电机矢量控制分析[D].成都:西南交通大学,2012.
(责任编辑:陈 欣)
Research on fuzzy control of PMSM
SU Minghan
(DepartmentofElectronicEngineering,HongKongUniversityofScienceandTechnology,ClearWaterBay,Kowloon,HongKong,China)
Good performance can be achieved if the PID controller’s parameters match with the control system.However,the parameters of PID have to be modified when the system’s parameters change,which indicates its lack of robustness.In response to this,a fuzzy PID controller is designed in this paper to modify the PID controller’s parameters,which makes PMSM track output in time.Simulation results show that the fuzzy PID controller has a lot of advantages,such as fast response,high accuracy,etc.
PMSM;PID controller;fuzzy control
2016-04-18
苏鸣翰(1991-),男,辽宁鞍山人,香港科技大学电子工程系研究生.
TM351
A
1008-2441(2016)04-0014-07
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15
防爆电机(2022年3期)2022-06-17
成都信息工程大学学报(2021年6期)2021-02-12
防爆电机(2020年6期)2020-12-14
现代装饰(2020年7期)2020-07-27
运筹与管理(2019年10期)2019-12-17
人民音乐(2016年3期)2016-11-07
光学精密工程(2016年3期)2016-11-07
广东石油化工学院学报(2016年3期)2016-05-17
体育科学研究(2015年5期)2015-02-28