
气动系统在竞赛机器人中的应用
2016-12-05 13:15谭梓炜
新教育时代·教师版 2016年30期
关键词:原理
谭梓炜

摘 要::Makeblock是融合机械 、电子、软件三者相结合的创意实现平台。借助 Makeblock,你可以快速搭建高性能气动机器人。本文主要介绍了 Makeblock和气动机器人的原理。
关键词:Makeblock 气动机器人 原理;
一、Makeblock简介
Makeblock是一款专为Makeblock平台电子控制而开发的免费应用,同时您也可以用它来和Arduino平台的传感器和执行器进行数据交互,使用它来和您作品中的电子部分进行交互,控制您机器人的移动,操控机械臂,控制一个倒水机器人,发射小球的机器人,控制相扑机器人和别人对战,甚至控制一些家用和竞赛,教育的机
器人。
Makeblock最初的逻辑理念就是打造金属材料的“乐高积木”,提供另外一个无需专业知识灵活搭建专业机器人的平台。深圳的一支创业队伍开创了Makeblock,让用户实现创意的平台,给使用者做出了一套内容非常完善的软件、电子和机械的解决方案。Makeblock 主要解决电子、软件和硬件这三方面不统一的问题。机械部分,机械构件采用的材料绝大部分是铝型材,这些构件包含动力构件、整体框架构件、传动构件和连接部位的构件。用这些机械构件基本上能够组建出各种类型的机器人或者其他机械构型。这些机械构件具有机械美感而且相当专业。主要使用刚度非常高的铝型材。机械零件就类似人类的肢体躯干。
电子模块,基于应用范围非常广泛的开源硬件Arduino,设计开发的各种类型的传感器、控制器及电机驱动单元,采用的接口都是按照机械国际标准而来的RJ25接口,单元化程度非常高,而且使用颜色标签接线体系,这样用户操作起来非常容易方便,即使没有接触过这方面专业知识的用户也可以进行操作。这方面就像人类的大脑以及感官。
软件部分,适用于平板电脑、手机等等各种类型的客户端的App。用户可以利用Makeblock搭建的作品进行交换数据,实现某种动作,操作起来非常直观和容易,不需要学习相关的编程语言,也能够让使用者搭建的作品实现相应的功能。
此外,Makeblock这个平台是开源的开放的而且兼容性很强。许多常用的电动机和标准的工业构件都可以安装在Makeblock搭建的产品里,同时,可以把乐高积木里面的一些构件和 Makeblock 的构件混合起来共同搭建新模型。
使用MakeBlock搭建的产品具有下面三方面优势:
1.具有非常高的刚度和强度。
2.搭建产品的结构可以非常庞大,有利于向工业级别产品发展;
3.因为采用铝型材这种金属材料,更能体现出机械的特点,更能展现机械美观,因此很容易得到认可,也不会被大众开玩笑说成玩具,更加适合18岁以上的人群。
二、气动系统
气动指的是利用气体压强实现动作,由于使用的是气体这种介质,获取方式非常简单,且不会造成环境污染、非常干净[1]。但由于气体能够压缩,没有办法传递比较大的载荷,通常情况下,工作压强在0.4-0.8之间,气压传动方式和使用控制、比较便于维修,费用比较低、使用起来比较可靠和安全、使用寿命比较长,所以在传动和控制方面应用十分广泛[2]。气压传动系统在机器人竞赛中使用范围越来越大,下面以手动机器人为例,分析设计气压传动和控制方法。
1.手动机器人
竞赛要求每个参加比赛的队伍做手动机器人,能够和很多智能机器人一起配合实现动作,且要求机器人一共重50kg。因为战略战术的需求,设计人员增加了智能机器人筹码,其工作内容仅有一个,即抢烽火台上面的主火炬。这样手动机器人需要做的事情很多,其中包含篝火盘、外围副火炬,加上击出敌方的燃料球,来阻挡敌方登上烽火台。而手动机器人不允许走进簧火盘的上面和自动区,且发射篝火盘和外围副火炬的时候,击球的角度和力度是不一样的,所以想要实现投球行为,设计手动机器人要有3种角度和
力度。
射球和投篮机构是手动机器人其中一个核心,采用气压传动方式。在一样的功率下,就气压装置和电器装置这两方面来说,气压传动的重量比较小,体积不算太大,结构十分紧凑、功率密度比较大、控制起来比较容易,易于和电控制结合,比较适用于自动化比较高的地方[3]。采用气动系统还有一个很关键的优势是非常容易进行直线活动,且速度相当快[4]。不足之处就是不能够准确的控制活动位置,一般情况下,仅仅能够满行程活动。但这一不足之处在结构设计上能够加以弥补[5]。基于设计方案,需主副两个气缸用于控制,让其能根据一定速度缩回和伸出。与此同时,最好的效果是能控制主气缸伸出和缩回的速度,来更加灵活方便的调控射击方向。
气源角度,采用压缩气体钢瓶来当作气源,因为比赛时间很短,所以使用存储一定量的压缩气体的钢瓶,能够满足竞赛需求。但就保险方面而言,在符合重量要求的条件下,应该增加规格很小的充气泵,及时补充能源。
气缸伸出和缩回的速度,可以利用流量的多少对其进行控制,然而气缸做伸出和缩回的力可以基于气体压强来确定,手动机器人的压缩空气钢瓶上面有一个稳压阀,通过它能确保输出的气压是恒定的,然而流量多少方面,仅能在整个气路中由电磁控制阀和节流阀相互配合,将运动速度控制在3个档位上面。
2.投球机构
通过两个气缸来驱动,主气缸用于完成投球,副气缸主要是调整投球的角度。
图2-1为投球结构的气动机理图,2个气缸都是通过二位五通这种电磁阀来决定气路是否通,利用流量调节阀来决定气缸伸出和缩回的速度。节流阀打开的大小程度需通过反复试验进行控制,来仔细查看手动机器人的速度,满足需求后,使用螺纹扣件将其锁紧。
主气缸是投球的主要构件,调控其伸出和缩回的速度就能够调整发射燃料球的力和其运动轨迹,如果想要在竞赛的过程中,基于实际情形,轻松灵活地调整发射燃料球的力和距离,就要针对主气缸设计可以调控的变速单元。
在调控主气缸的主电磁阀出气口,和3个二位三通这样的电磁阀,同时在每一个电磁阀出气口都要安装一个节流阀。通过试验,把3个节流阀设置不同大小的流量,这样就实现了整个投球机构3个不同档位的运动速度。随意选择其中一个电磁阀通电,这样主气缸里就会通有已经设置好流量的空气,这时再让主电磁阀通电,就能完成投球的行为。
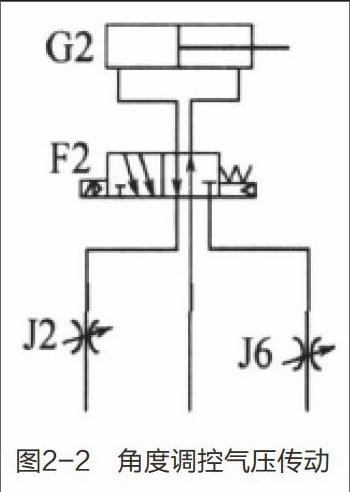
3.角度调控结构
平面四杆结构和副气缸一起能够实现发射角度的改变,由于燃料球的质量并不是很大,且不需气缸的推动力很大,因此选用规格比较小的气缸就能够实现相应的行为。还有一点就是,规格比较小的气缸本身的质量并不是很大,对发射架发射球不会产生非常大的影响。
图2-2为投球气缸的气压控制回路,副气缸为,二位五通电磁阀为,下面连接的还有两个节流阀,通常,电磁阀不接通电的时候,压强很大的空气从气缸的前面进去,这时气缸属于缩回的状态,且持续这种状态。当下达反射指令的时候,电磁阀通上了电,压强很高的空气从气缸的尾部进去,气缸前面的空气经过节流阀的调节速度之后排出去了,这样能够使气缸以恒定的速度伸出,调整燃料球中心处于什么地方,进一步调整发射燃料球的角度。
竞赛结果验证了设计的整个机构简单,本次设计的机器人结构简单,操作起来容易,运转稳定可靠,满足设计需求。
参考文献
[1]刘祥时.竞赛机器人控制系统的研制[J].机电工程,2005,22(6).
[2]钱晓忠.竞赛机器人的创意设计与基本机械结构[J].无锡职业技术学院学报,2005 4 (1 ).
[3]许弋.竞赛机器人的控制系统设计[J].无锡职业技术学院学报,2005 4 (1 ).
[4]凌勇坚,等.气动控制系统的设计和使用[J].液压与气动,2003 ( 3).
[5]吴广顺,等.PLC在搬运机器人控制系统中的运用[J].机床与液压,2006 (12).
猜你喜欢
中学生数理化·八年级物理人教版(2022年5期)2022-06-05
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
中学生数理化·八年级物理人教版(2021年5期)2021-11-22
保健医苑(2020年1期)2020-07-27
电子制作(2019年22期)2020-01-14
幽默大师(2019年10期)2019-10-17
数学物理学报(2019年1期)2019-03-21
中学生数理化(高中版.高二数学)(2017年1期)2017-04-16
电子制作(2016年15期)2017-01-15
高师理科学刊(2016年8期)2016-06-15
