自动驾驶汽车测试体系与现状探究
2016-12-08 05:12王艺帆
汽车与安全 2016年10期
王艺帆
(公安部道路交通安全研究中心,北京 100062,中国)
自动驾驶汽车测试体系与现状探究
王艺帆
(公安部道路交通安全研究中心,北京 100062,中国)
自动驾驶汽车正处在快速商业化进程中,受到各国政府、汽车企业、科技公司高度关注。由于自动驾驶技术涉及传感器感知、车联网、智能控制等诸多领域新技术,国内外研发和管理机构的自动驾驶汽车测试工作面临新的挑战,存在较大提升空间。本文基于自动驾驶汽车特性,简析其测试体系框架,并介绍了国内测试应用和相关法规标准情况。
自动驾驶;感知系统;交通环境;测试
自动驾驶汽车是能够利用车载传感器或摄像头来感知车辆周围环境,并根据感知所获得的道路、车辆位置和障碍物信息,智能自主地控制车辆的转向和速度,从而使车辆能够安全、可靠地在道路上行驶,并到达预定目的地的汽车[1]。它融合了汽车电子、移动互联、智能感知与控制等技术,最终实现部分或完全取代人类驾驶员操控车辆,应对各类交通状况。其系统复杂性远超普通汽车,也并非目前各类ADAS (Advanced Driver Assistance Systems,高级辅助驾驶系统)的简单集合。如何确保复杂系统的安全性、可靠性,成为自动驾驶汽车从概念到量产过程中的重要挑战。自动驾驶汽车测试验证显得尤为重要。
目前美国、英国、德国等地政府已允许无人驾驶汽车上路测试,为自动驾驶技术研发测试提供了有力保障[2]。除了公共道路测试,国内外各地也在快速建设专用测试验证场地。但这些在开发时间、成本、灵活性方面满足不了自动驾汽车复杂功能的开发验证需求,在实车测试之前,系统设计、软件仿真和模型验证也十分重要。综合以上因素,本文将介绍自动驾驶系统测试体系,分析测试对象、环境、内容、流程,以供相关研究借鉴。
1 测试对象
自动驾驶系统由一套复杂的感知、控制、执行模块组成,驾驶需求、外部环境作为系统输入由感知模块采集,经过控制模块分析运算,执行模块操纵运行后,车辆运行状态为系统输出。车辆状态会根据驾驶员需求和周围环境,不断调整更新,以保障汽车状态安全且符合预期。自动驾驶汽车测试主要是验证感知、控制、执行三个系统的功能和安全性。
感知系统功能包括环境感知、内部感知、驾驶人感知,其中内部感知主要是通过车内CAN(Controller Area Network,控制器局域网络)总线实时采集多个车载电子控制单元信息和各类传感器信息,以获取车辆状态,包括车体(车内外温度、空气流量、胎压 ),动力(油压、转速、机油),车辆安全(安全带、气囊、门窗锁)等;驾驶人感知是通过人机交互界面或传感器获取驾驶人操控、手势、语音等控制指令,以及面部表情等检测信息,用来接收控制命令、检测驾驶人状态。控制系统包含控制策略软件、控制器硬件两部分,可制定驾驶指令、规划行驶路径。执行系统包括制动、转向、照明、仪表盘等组成系统,可按照指令执行改变车辆行驶速度和方向、车灯开闭、仪表盘显示等操作。自动驾驶测试对象的系统框架如图1所示。
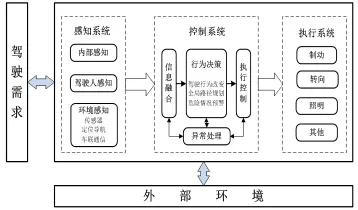
图1 自动驾驶测试对象框架图
2 测试环境
为确保汽车性能在各种环境下均满足用户需求,传统汽车研发过程中需进行汽车环境适应性试验,即在各种环境条件下对整车、系统及零部件进行测试、验证及相应的主观评价,发现设计缺陷和隐患,并改进和加强防护措施。例如,通过开展高温、高原、高寒“三高”环境适应性试验,在特殊、苛刻环境下,对车辆综合性能进行试验验证[3]。自动驾驶汽车开发不仅要经历传统环境适应性试验,以验证特殊气候环境下性能,还要经历各种交通环境适应性试验,以验证感知能力和智能决策能力是否能够实现部分或完全自动行驶。
实际交通环境由各类环境元素组成,如交通信号灯、标志标线、其他交通参与者、天气情况、交通管制等。为了提高交通环境适应性试验测试效率、可操作性和易复现性,测试环境需基于实际交通环境,进行环境元素分类、组合以及参数化[4,5]。
(1)元素分类。根据环境元素动静特性及含义属性,可分为静态元素、动态元素和事件元素三种。静态元素是指在一定时间内无位置移动或状态改变的、通过视觉可以感受到的区域环境元素,如道路类型、建筑物、天气状态等。动态元素是指一切可能影响自身车辆行驶的运动元素,如同车道车辆、路边行人、周边声音等。信号元素是指通过车载网络、V2X(车与外界)通信等方法获取的信息元素,如车辆内部零部件故障、前方交通拥堵情况、消防车即将驶来等信息。测试环境元素分类组成如图2所示。
(2)元素组合。在测试中,各类环境元素作为单个变量,测试环境则为多个环境元素变量的集合。通过组合不同元素、改变集合内容,可设计模拟各类交通场景。例如,建立“雨天+湿滑路面+城市道路+十字交叉路口+左转+行人穿行”的组合,设计相应测试场景。
(3)元素参数化。根据环境元素的属性和状态,为元素变量定义数据类型和大小。例如,将交通信号灯定义为有三个数值的变量,分别表示红黄绿三色;将前方车辆定义为有多个变量的数组,包含相隔距离、行驶速度等信息。参数化是对交通环境进行软件仿真的基本流程,也是设计模拟测试场景、进行实际道路测试的重要手段。
3 测试内容
自动驾驶系统测试内容需围绕系统目标和组成结构进行设计,以验证系统功能、安全和鲁棒性。系统目标是保证车辆可在复杂、未知、多变的交通环境下自主控制,完成各种设定的智能驾驶行为;系统结构由感知系统、控制系统、执行系统3个子系统组成。测试内容应包括各子系统功能测试、交通环境测试,其中感知系统对外部环境的准确感知能力,是自动驾驶的先决条件。

图2 测试环境元素分类
(1)子系统功能测试中,感知系统测试主要是验证车载传感器、车联通信、导航定位等装置获取环境信息、识别复杂场景的功能;控制系统测试是验证控制器软硬件的数据融合、威胁评估、路径规划、路径跟踪、故障处理等功能;执行系统测试是验证车辆实时精准控制驱动与制动、电动助力转向、自动变速器、电子稳定系统等执行机构的功能。由于子系统装置和技术方案的不同,例如感知传感器有单目双目摄像头、激光雷达、毫米波雷达等设备种类,车联通信有专用短程通信(Dedicated Short Range Communication,DSRC)、LTE-V(LTE-Vehicle)等技术路线,动力系统有内燃机、混合动力、纯电动等系统方案,相应的具体测试内容也会有所不同。
(2)交通环境测试是验证车辆在各种交通环境下的智能驾驶行为,包括车道保持、遵守交通规则、遵守礼节、应对其他车辆、道路使用者、或者经常碰到的突发状况,以测试系统实时感知环境信息、控制车辆实现智能驾驶的功能,和在装置失效或者软件错误时维持安全状态的功能。智能驾驶行为测试包括检测和响应道路环境、交通参与者、管理事件等环境元素和执行典型行车任务,如图3所示。维持安全状态测试针对防止系统失效的冗余性设计,以及当实际情况超出系统能力时,由驾驶人重新接管车辆的转换策略。
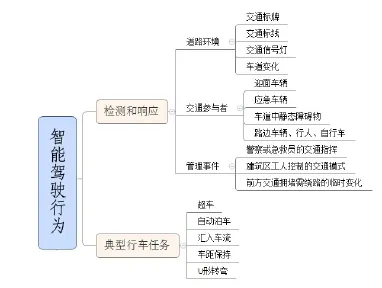
图3 典型智能驾驶行为
4 测试流程
传统汽车控制系统开发测试方法是典型的串行开发模式,由于存在开发效率低、测试改进困难、程序可移植性差等缺点,目前现代化开发测试已普遍采用V模式[6]。该模式由于将整个开发测试过程构造成一个V字形而得名,它大量使用计算机辅助控制系统设计(Computer-Aided Control System Design,CACSD),将计算机支持工作贯穿开发测试全程,使得开发、测试处在同一环境,每步开发过程都可方便验证、快速更新。V模式开发测试流程如图4所示,主要包括控制系统设计及软件离线仿真、快速控制原型、产品代码生成、硬件在环(Hardware In Loop,HIL)仿真测试、实车验证测试与标定[7,8],逐步完成了系统需求分析与仿真模型设计、子系统模型设计与原型系统下运行、仿真模型转换为产品代码、真实运行环境下子系统测试、整车系统集成测试与标定的开发测试工作。从结构角度分析,V模式左侧表示系统功能的分析、分解与开发,右侧表示系统功能的整合、综合与测试;左侧重在仿真模型开发,右侧重在软硬件结合测试;左右两侧有一定对应关系,使得在需求分析、系统设计、子系统设计等不同开发阶段有采用相应测试验证方案,便于实现分层测试、迭代验证,最终完善控制系统。

图4 V模式开发测试流程图
在V模型流程下,自动驾驶系统测试既要验证系统功能的安全、可靠,又要保证测试环境的真实、全面。按照测试技术方案,系统测试可分为“软件在环(SIL)——硬件在环(HIL)——车辆在环(VIL)——试验场地——实际道路”;按照测试场景搭建方式,又可分为“仿真软件的模拟场景——受控场地的测试场景——公共道路的实际场景”。测试流程是一个由模拟仿真逐步面向实际应用的过程,期间通过自然驾驶数据、实际环境信息、上路测试数据的采集标定,不断验证和迭代完善系统功能。
自动驾驶测试由于要充分考虑交通环境影响,相比传统V模式流程,软件离线仿真测试、实际道路测试及数据采集在整体开发测试流程中作用更加显著,且两者功能相互弥补、缺一不可。软件离线仿真可进行大量、可重复性模拟场景测试,并且可基于一个真实交通场景数据自动推演其他交通场景,实现多种环境元素可变可控,大大提高测试效率;自动驾驶系统主流的基于深度学习的识别和控制算法开发验证需要大量实际交通环境、自然驾驶信息等路测采集数据,算法有效性与数据质量关系密切;实路测试是验证系统功能、获取用户信任的必备阶段,复杂、随机的实际场景有助筛选系统漏洞,避免实际应用时发生交通事故。
5 测试现状
目前,全球在自动驾驶汽车的试验场地测试、实际道路测试、测试政策制定等方面快速建设部局,取得了显著进展[9]。
(1)试验场地测试。多个国家和地区均已建设自动驾驶汽车测试示范区,搭建多种道路测试场景。例如,美国州政府主导建设了两大自动驾驶示范阵营,东部的底特律Motor City(位于密西根州)和西部的硅谷Silicon Valley(位于加利福尼亚州),分别有两个自动驾驶汽车测试示范区。2015年,我国上海嘉定也开启建设智能网联汽车试点示范区,并计划建设成为全球测试功能场景最多、DSRC和LTE-V等V2X通讯技术最丰富,覆盖安全、效率、信息服务和新能源汽车应用四类领域的国际领先封闭测试区。
(2)实际道路测试。谷歌公司自动驾驶汽车自2012年起在美国多州上路测试,之后大众、奔驰、特斯拉等多家汽车企业陆续开展了自动驾驶实际道路测试;特斯拉公司已为市场在售车型提供自动驾驶功能,但近期该功能在国内引发了多起伤亡事故;2016年8月,新加坡率先允许nuTonomy公司自动驾驶出租车上路营运,9月美国宾夕法尼亚州匹兹堡市也允许Uber公司提供自动驾驶汽车载客服务,但这些营运测试车上均配有安全驾驶员,随时准备在必要时控制车辆。
(3)测试政策制定。目前,美国、欧州、日本、新加坡等国家和地区政府发布了道路测试指南,规范指导自动驾驶汽车测试。其中,美国加州政府机动车管理局于2013年提出了自动驾驶汽车道路测试规范;2014年出台正式规定,要求每辆无人驾驶汽车必须首先获得资质授权才能上路行驶,至今已有大众、福特、通用、博世、谷歌以及中国百度、蔚蓝在内的16家汽车厂商、科技公司获得了加州测试牌照;2016年9月,加州政府签订新法案,允许自动驾驶汽车在公共道路测试时,可不配备人类驾驶员。美国联邦高速公路管理局(NHTSA)于2013年发布了自动驾驶汽车初步政策声明,对各州制定自动驾驶技术法规提出指导意见;2016年9月发布了《联邦自动驾驶汽车政策指南》[10],内容包括15项安全技术评估指南、州政府政策制定标准、NHTSA现行及未来新的现代化监管方式,进一步完善了自动驾驶汽车测试应用管理体系,同时NHTSA表示将继续与各方沟通,合理化、精细化指南内容,计划一年时间内推出新版本。2016年初,我国工业和信息化部牵头,中汽中心组织相关技术机构和汽车企业,已联合开展了关于《智能网联汽车使用公共道路测试管理规范》的研究工作,不久后我国也将建立测试管理制度和流程,在允许智能网联汽车使用公共道路进行测试验证的同时,最大程度地消除潜在风险、维护道路交通安全。
6 总结
自动驾驶技术是汽车行业和智能交通领域发展变革的新热点,并可能成为自上世纪个人汽车普及以来最大的个人交通革命,带来巨大的经济和社会效益。规范完善的测试标准和管理体系是引导自动驾驶汽车设计开发,推动产品商业化,保障消费者利益和交通安全的前提。本文对自动驾驶汽车测试体系进行了初步探究,介绍了测试应用项目和法规标准。
[1] 潘建亮. 无人驾驶汽车社会效益与影响分析. 汽车工业研究[J]. 2014(5): 22-24
[2] 夏溦. 自动驾驶汽车技术最新发展. 新经济导刊[J]. 2015(07): 24-27.
[3] 程源等. 汽车“三高”环境适应性试验开发和验证.公路与汽运[J]. 2016(03): 11-13.
[4] 熊光明,高利. 无人驾驶车辆智能行为及其测试与评价[M]. 北京:北京理工大学出版社, 2015.
[5] Koopman,P. and M. Wagner,Challenges in Autonomous Vehicle Testing and Validation. SAE International Journal of Transportation Safety[J], 2016.
[6] 魏学哲,戴海峰,孙泽昌. 汽车嵌入式系统开发方法、体系架构和流程. 同济大学学报(自然科学版)[J]. 2012(07): 1064-1070.
[7] 田真等. 基于V模式的整车控制系统开发及模型单元测试. 汽车工程学报[J]. 2012(06): 458-463.
[8] 侯艳贺,尹冬至. 基于V流程的整车控制策略开发,第十一届河南省汽车工程科技学术研讨会论文集[C], 2014.
[9] 陈大明,孟海华,汤天波. 全球自动驾驶发展现状与趋势(下). 华东科技[J], 2014(10): 68-70.
[10] Federal Automated Vehicles Policy Accelerating the Next Revolution in Roadway Safety, Washington, DC: U.S. Department of Transportation,National Highway Traffic Safety Administration,2016.
王艺帆,实习研究员,工学硕士,主要从事车辆安全性能运行安全研究,事故车辆案例深度调查,相关标准制定工作。
Research on test system and development of automated vehicles
WANG Yifan
(Road Traffic Safety Research Center of the Ministry of Public Security, Beijing 100062, China)
Automated vehicles are in the process of rapid commercialization with highly concerned by governments, auto companies, and technology companies. Because there are many new technologies integrated in the fields of automated vehicles, including sensor sensing, vehicle networking, intelligent control, and so on. It turns out many new challenges for global research and management organization in the test of automated vehicles. And there is much room for improvement in this field. Based on the characteristics of automated vehicles, this paper analyzed automated vehicles test system framework, and introduced the development of test applications and related regulatory standards, at home and abroad.
Automated vehicles; perceptual system; traffic environment; testing
猜你喜欢
环球时报(2022-03-09)2022-03-09
学生天地(2020年5期)2020-08-25
阅读(低年级)(2019年2期)2019-04-19
小太阳画报(2018年3期)2018-05-14
小天使·一年级语数英综合(2017年3期)2017-04-25
莫愁(2017年9期)2017-04-07
阅读与作文(小学低年级版)(2016年12期)2016-12-22
汽车博览(2016年9期)2016-10-18
文理导航·科普童话(2015年6期)2015-07-29
小猕猴学习画刊(2015年2期)2015-01-22