基于电流环的改进ADRC在微型光电稳定平台中的应用
2016-12-16 07:36刘小强邢军智任元斌柳井莉任高辉
光电工程 2016年7期
刘小强,邢军智,任元斌,柳井莉,任高辉
(西安应用光学研究所,西安710065)
基于电流环的改进ADRC在微型光电稳定平台中的应用
刘小强,邢军智,任元斌,柳井莉,任高辉
(西安应用光学研究所,西安710065)
针对微型光电稳定平台的控制提出在电流环基础上使用自抗扰控制器,并对自抗扰控制器进行了改进,在非线性反馈的基础上串联了经典控制理论的校正环节,增加了自抗扰控制器的适用范围,并在一定程度上解决了微型光电稳定平台尺寸受限给控制系统带来的部分非线性问题。某微型稳定光电平台的频率响应测试数据显示,该方法可用于微型光电稳定平台控制的工程应用,且比传统自抗扰控制器适应性更强。
稳定平台;校正;扩张状态观测器;非线性PID
0 引言
微型光电稳定平台控制系统受空间、重量、价格等制约,较难选到理想的传感器及执行机构等器件,尤其是其体积限制了只能选择小尺寸电机。以目前的电机理论及电机制造工艺小电机必然是高转速、低扭矩,低速平稳性较差,如果采用减速机构又会带来其他问题,所以微型光电稳定平台存在机械特性软、控制范围内速度运行不平稳等非线性问题。国内外针对微小型光电系统控制问题的研究相对较少。本文针对某微型光电稳定平台控制系统,在电流环的基础上对自抗扰控制器进行了改进设计,经测试,该方法工程可用。自抗扰控制器是韩京清研究员提出的一种具有非线性特征的控制算法,该控制器虽然有工程应用,但其相关理论仍然在进一步完善过程中。
1 基于电流环的微型光电稳定平台被控模型
微型光电稳定平台为了充分利用被控对象的惯量对平台稳定作用,减小空回、摩擦等非线性因素对控
制的影响,驱动方式采用力矩电机直接驱动,对于存在电流环的力矩电机直驱型稳定平台的被控模型,由于受电流环高带宽对反电动势的抑制作用,电机的电气特性可由电流环代替,则平台的被控模型可简化为一个纯积分环节[1],其被控模型如图1所示。图中Ki为电流环闭环放大系数,KT为力矩系数,Mr为干扰力矩,J为电机轴上的转动惯量,U为电流环输入电压,ω为平台运动速度。

图1 基于电流环的微型光电稳定平台的被控模型Fig.1Control object of miniaturized electro-optical stabilized platform based on current
2 自抗扰控制器
图2为自抗扰控制器原理框图,可见自抗扰控制器主要由四部分组成:使用跟踪微分器为过渡过程、非线性PD实现非线性反馈、通过扩张状态观测器(ESO)实现对扰动的估计、控制量U的生成。v1、v2为输入信号的广义微分信号,z1、z2、z3为状态观测器ESO的输出估计值,f0为扰动中已知部分解析表达式,b为补偿常数,e1=v1-z1,e2=v2-z2,U0为经非线性PD后得输出电压,U为最终控制电压。更详细机理描述可参考韩京青研究员的相关文章[2-3]。

图2 自抗扰控制器算法原理框图Fig.2Block diagram ofADRC on principle
3 改进型自抗扰控制器
自抗扰控制器的核心思想是利用扩张状态观测器对摩擦等未知扰动进行估计补偿来提高小误差段的增益,在该方法中参数调整与控制效果之间存在定性关系,可调参数与控制效果之间的定量关系尚不明确。在某微型光电稳定平台控制实践过程中,受微型光电稳定平台相关非线性影响,通过多次参数调整控制效果未达到使用要求。
通过对自抗扰控制器的频率特性定量测试,然后根据测试结果,借助经典理论,针对性地添加零极点,以改善控制性能。基于此思想,在自抗扰控制器中串入经典控制校正环节,见图3。该算法的优势体现在如下两个方面:首先,该算法保留了自抗扰控制器的优点[2-3];其次,该算法可针对性地对自抗扰控制器的控制性能进行改善,使自抗扰控制器参数调整难度降低,拓展了自抗扰控制器的适用范围,其原因在于经典控制理论零极点配置对控制特性的影响是可定量分析的,不同于自抗扰控制器参数变化对结果影响的非线性特点,所以在自抗扰控制器达到一定效果的基础上,通过经典控制理论的零极点配置,对其存在的问题进行改进,可使控制性能进一步提升。
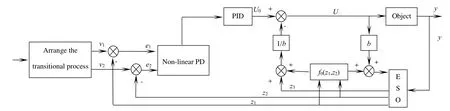
图3 改进型自抗扰控制器原理框图Fig.3Block diagram of improvedADRC on principle
4 基于电流环的改进型自抗扰控制器设计
由图1可知,可以将具有电流环的微型光电稳定平台被控模型简化为一阶系统,据此可将图3简化,并在非线性反馈中增加了一个积分环节来提高控制精度,可得具有电流环的改进型自抗扰控制器原理框图如图4。
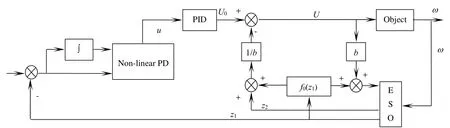
图4 具有电流环的自抗扰控制器稳定平台控制原理图Fig.4Block diagram of improved ADRC based on current loop
4.1 扩张状态观测器(ESO)参数推导
由图1

式(1)可等效为


令b=KiKT/J ,ε=z1-y ,根据文献[6]扩张状态观测器ESO的形式为

式中:β01,β02,α,δ为可调参数,

其中f(x,t)取Stribeck摩擦力模型:

式中:Mc为库仑摩擦力矩,Ms为静摩擦力矩,ωs为Stribeck速度,μ为粘性摩擦系数,由于z2是对未知部分的估计,其中包含摩擦力模型参数的未知因素,所以Stribeck模型参数经粗略测量,保守取值即可。其中ESO(式(4))的离散化形式:

其中T为离散化形式的采样周期。
4.2 非线性PID
非线性PID是指把传统PID的误差、积分、微分“线性加权和”改成“非线性组合”,一种可用的“非线性组合”形式为fal(ε,α,δ),其定义见式(5),该函数具有小误差大增益、大误差小增益的特点,见图5,则非线性PID控制量为


图5 fal(ε,α,δ)/ε函数曲线Fig.5Function curve of fal(ε,α,δ)/ε
4.3 经典控制理论校正环节
经典控制理论校正环节串联在“非线性PID”校正之后,在“非线性PID”校正的基础上,根据控制系统的实测频响特性,针对性地对其进行调整,例如通过增加零点补偿相位,增加极点滤出噪声,也可以增加凹口网络对谐振等进行陷波处理。具体可参考经典控制理论相关文献。为了便于描述,设经典校正环节函数时域表达式为h(x)。
4.4 综合控制量U的生成
根据图4,控制量:

5 某实例设计参数及控制实测效果
在本实例中,KT=0.375,Ki=0.6,J≈0.001 2 Kg·m2。
5.1 电流环设计参数及实验结果
电流环按照文献[2]的方法设计,取ζ=1,固有频率ωn=800 Hz,实测电流环闭环曲线见图6,实测带宽1 396 Hz,无超调。
5.2 基于电流环的改进型自抗扰控制器设计参数及实测结果
1)扩张状态观测器
采样周期T=0.001 s,取b=187,β01=500,β02=6 987.7,α=0.25,δ=0.005,Mc=0.09 Nm,Ms=0.11
Nm,sω=0.03 rad/s,μ=0。

图6 电流环闭环实测频响曲线Fig.6Frequency response of current loop
2)非线性PID控制率
非线性PID控制率取式(9)形式,其中0β=30,0α=0.5,0σ=0.1,1β=2,1α=0.5,1σ=0.1,2β=0.1,2α=0.5,2σ=0.1。
3)经典控制理论校正环节
根据实测的非线性PID校正后稳定环路频率特性曲线,见图7,该系统开环剪切频率及闭环带宽大于150 Hz,谐振峰值Mr=3.16,该系统在工程上难以使用,同时可见,该系统的开环增益在频率大于6 Hz之后未得到有效衰减,且在频率小于20 Hz的频率段开环相位大,相位具有较大的调节余量,考虑到基本惯性环节在大于转折频率后以-20 dB/十倍频程衰减及0°至-90°相位特性,该特性适合对相位有保证的系统进行幅值衰减,所以可在该系统中串联一个转折频率为6 Hz的基本惯性环节对其进行校正。

图7 采用自抗扰控制器的速率稳定环路频响曲线Fig.7Frequency response curve ofADRC speed loop
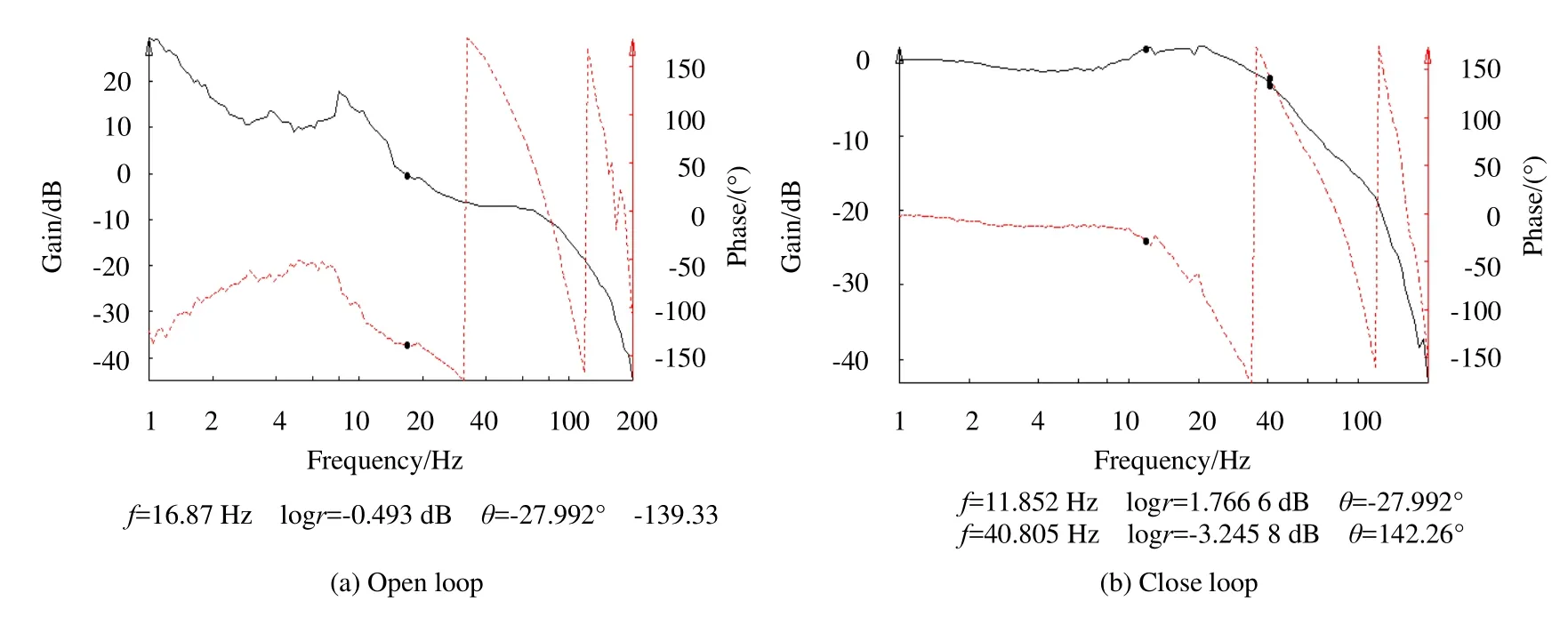
图8 采用改型自抗扰控制器速度环开、闭环频响曲线Fig.8Frequency response curve of improved ADRC speed loop
4)控制效果
图7是采用自抗扰控制器通过频响分析仪测试的速率稳定环路开、闭环频响曲线,由图7可见系统在高频区对噪声的抑制能力较差,超调极大,不能满足工程应用。图8为在非线性PID校正后增加了经典校正环节,即采用改进型自抗扰控制器后系统实测的速率稳定环路开、闭环频响曲线,由频响曲线看出高频段被有效衰减,开环剪切频率fc=16.9 Hz,相位裕度γ=40°,带宽B=40 Hz,谐振Mr=1.23,可以满足一般微型光电稳定平台对控制系统的指标要求。
结束语
本文针对微型光电稳定平台控制提出一种基于电流环的改进型自抗扰控制器,并在某型微型光电平台控制中得到验证。该方法通过调整扩张状态观测器4个参数,非线性PID校正9个参数,并在分析其实测频响数据的基础上,添加了经典控制校正环节,最后取得较好的频率响应特性。由实测频率响应数据可知,改进后自抗扰控制器的适用范围更广,可满足一般的工程应用。
[1]刘川,朱非甲,马伟,等.直线电机的线性自抗扰控制[J].电机与控制学报,2013,17(01):71-76. LIU Chuan,ZHU Feijia,MAWei,et al.Research on linear active disturbance rejection control over linear motor[J].Electric Machines and Control,2013,17(01):71-76.
[2]黄永梅,张桐.高精度跟踪控制系统中电流环控制技术研究[J].光电工程,2005,32(1):16-19. HUANG Yongmei,ZHANG Tong.Study on the control of a current loop in a high-accuracy tracking and control system[J]. Opto-Electronic Engineering,2005,32(1):16-19.
[3]韩京清.自抗扰控制器及其应用[J].控制与决策,1998,13(1):19-22. HAN Jingqing.Auto-disturbances-rejection Controller and It’sApplications[J].Control and Decision,1998,13(1):19-22.
[4]黄一,薛文超.自抗扰控制:思想、应用及理论分析[J].系统科学与数学,2012,32(10):1287-1307. HUANG Yi,XUE Wenchao.ADRC:Methodology,application and theoretical analysis[J].Journal of System Science and Mathematical Science,2012,32(10):1287-1307.
[5]陆培国,寿少峻.舰载光电系统高精度跟踪控制技术[J].应用光学,2006,27(6):480-483. LU Peiguo,SHOU Shaojun.High accuracy tracking technology and its application in ship-borne electro-optical system[J]. Journal ofApplied Optics,2006,27(6):480-483.
[6]WANG Yinqiu,WU Qinghe,WANG Yao.Distributed cooperative control for multiple quadrotor systems via dynamic surface control[J].Nonlinear Dynamics(S0924-090X),2014,75(3):513-527.
[7]韩京清.自抗扰控制技术[M].北京:国防工业出版社,2009:256-315. HAN Jingqing.Active Disturbance Rejection Control Technique[M].Beijing:National Defence Industry Press,2009.
[8]Nikolakopoulos G,Alexis K.Switching networked attitude control of an unmanned quadrotor[J].International Journal of Control,Automation and Systems(S1598-6446),2013,11(2):389-397.
[9]HANJingqing.FromPIDtoactivedisturbancerejectioncontrol[J].IEEETransactionsonIndustrial Electronics(S0278-0046),2009,56(3):900-906.
[10]丛麟骁,黄旻,赵宝玮.自抗扰控制在航空成像稳定平台上的应用[J].光电工程,2014,41(9):38-44. CONG Linxiao,HUANG Min,ZHAO Baowei.ADRC Applications on a Stable Platform for Aerial Imaging[J]. Opto-Electronic Engineering,2014,41(9):38-44.
[11]邱宝梅,万吉权,王建文.机载摄影稳定平台的自抗扰控制[J].光电工程,2012,39(4):21-26. QIU Baomei,WAN Jiquan,WANG Jianwen.Active Disturbance Rejection Controller of the Aerial Photography Stabilized Platform[J].Opto-Electronic Engineering,2012,39(4):21-26.
Application of an ImprovedAuto Disturbances Rejection Controller on Miniaturized Electro-optical Stabilized System
LIU Xiaoqiang,XING Junzhi,REN Yuanbin,LIU Jingli,REN Gaohui
(Xi’an Institute of Applied Optics,Xi’an 710065,China)
Active Disturbance Rejection Controller(ADRC)is used in the current loop of a miniaturized electro-optical stabilized system.In addition to current loop,the method uses an improved auto disturbances rejection.The method uses classical adjust elements series connected with non-linear feedback adjustment to design control system.The frequency response data of a miniaturized electro-optical stabilized system show that the method can be applied in engineering field and the method is more adaptive than classical ADRC.
stabilized platform;adjust;ESO;NLPID
TN253;TN247
A
10.3969/j.issn.1003-501X.2016.07.005
1003-501X(2016)07-0028-06
2015-07-03;
2015-12-11
“十二五”预研基金资助项目(y130105)
刘小强(1979-),男(汉族),陕西神木人。高级工程师,硕士,主要从事光电跟踪稳定平台控制及相关算法的研究。
E-mail:21877756@qq.com。
猜你喜欢
中国交通信息化(2020年4期)2021-01-14
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
东坡赤壁诗词(2019年3期)2019-07-05
北京航空航天大学学报(2017年6期)2017-11-23
黑龙江电力(2017年1期)2017-05-17
噪声与振动控制(2016年4期)2016-09-01
电测与仪表(2016年10期)2016-04-12
铁道科学与工程学报(2015年5期)2015-12-24