
一种仿生蛇形机器人的结构设计
2016-12-20 11:01聂宇,张琢,林芸
现代机械 2016年6期
聂 宇,张 琢,林 芸
(贵阳学院机械工程学院,贵州贵阳550005)
一种仿生蛇形机器人的结构设计
聂 宇,张 琢,林 芸
(贵阳学院机械工程学院,贵州贵阳550005)
蛇形机器人能够在复杂的环境中运动。通过对蛇的身体结构、运动特点进行分析,对其骨架进行仿真抽象,设计了一种采用行星齿轮差动结构且具有三自由度的仿生蛇形机器人。此种结构蛇形机器人利用舵机以不同速率转动驱动行星齿轮差动耦合可实现俯仰、偏航、回转等运动,配备以传感器感知外界环境,具备驱动能力强、传动精度高等优点。通过UG建立了相应的虚拟样机并分析得出了临界转角等技术参数。
蛇形机器人 结构设计 骨架抽象 行星齿轮差动结构
0 引言
蛇是世界上无四肢动物中最庞大的一类,分布在世界上除北极、南极外的各个地方。蛇的身体具有低重心、高冗余度、高鲁棒性、多自由度、良好的稳定性等特点,具有复杂多变的运动方式。仿生蛇形机器人是一种在运动机理上高度模仿蛇的新型机器人,其主要靠蛇体和地面之间的摩擦力作用来驱动蛇体的运动,而不需要额外的驱动轮、动力源或牵引车来带动蛇体运动。仿生蛇形机器人可以应用于战争侦查、管道疏通、伤员搜救、医疗、航天等领域。
国外蛇形机器人研究技术较为成熟。日本东京工业大学的Shiego Hirose研制出可以在地面实现蜿蜒曲线运动的ACM系列蛇形机器人样机[1-2];德国GMD 实验室研制出了共六个模块,有水平方向和竖直方向两个自由度,从而可以实现三维空间运动的GMD -Snake1[3]。国内蛇形机器人技术起步较晚,但发展十分迅速。上海交通大学的颜国正、崔显世研制了我国第一条蛇形机器人样机[4];中科院沈阳自动化研究所已研制出两代功能样机,其第一代功能样机采用模块化设计,每个模块具有2自由度[5];第二代功能样机巡视者Ⅱ具有三自由度[6]。国内还有哈尔滨工业大学、华南理工大学等先后投入到对蛇形机器人的研究[7-8]。
1 蛇形机器人的整体方案
在设计之初需对蛇形机器人进行整体方案设计(图1):首先,对生物蛇进行身体结构分析,了解其运动方式、运动特点。其次,通过对常用结构设计方案进行比较,设计出合理高效的单元模块机械结构。再次,选择合适的驱动方案,选取好舵机并采用模块化的设计方式简化设计过程,节约成本也便于维护。最后,对蛇形机器人进行总体设计,得出相应的蛇形机器人技术参数。
图1 整体设计方案简图
1.1 蛇形机器人的组成结构
仿生蛇形机器人由蛇头、蛇身、蛇尾三个部分组成。蛇身部分是蛇形机器人的主体结构,它由多个单元模块串联而成,起到保护机体、传递运动的作用;蛇头部分功能为感知外界环境,安装有触觉传感器、距离传感器、力觉传感器;蛇尾部分安装有电池提供动力源。
1.2 生物蛇的身体结构分析
蛇的运动方式极其独特,主要靠蛇体的腹部与地面之间的摩擦产生前行的动力,其运动方式多种多样。蛇的运动方式是由蛇的身体结构所决定的,蛇没有四肢,全身被鳞片所覆盖,其身体细长,蛇身分为蛇头、蛇身和蛇尾三个部分,其中躯干部分有多达200-400块脊椎骨,这些脊椎骨前后相连。其中前脊椎骨具有球形凹陷,后脊椎骨具有球形突起,前后脊椎骨形成了一种类似于球形铰链关节的结构(图2)[9]。通过球形铰链关节周围肌肉的收缩,关节间产生的相对的转动。在机械领域内,我们可以使用球铰副来代替球形铰链实现此种运动(图3)[10]。将生物蛇的骨架模型简单地抽象为一系列由球形铰链连接的杆件组成的简单模型(图4)。

图2 蛇的肌肉骨骼结构图[9] 图3 蛇的脊椎骨结构[10]

1-球形铰链;2-脊椎骨图4 体骨架抽象模型
1.3 结构方案设计
1.3.1 蛇形机器人常见结构设计方案
现阶段科研学者对蛇形机器人的设计方案主要有如下几种:
(1)平行连接
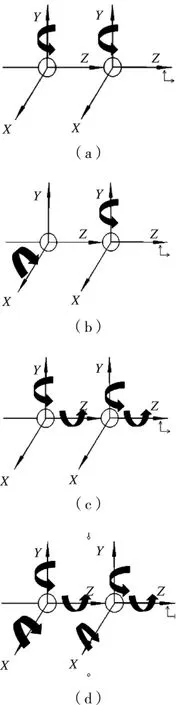
图5 设计方案示意简图
平行连接(图5a)是指组成蛇形机器人的单元模块间均以转动副相连,各转动副的轴线互相平行且垂直于纵轴线。其优点是单元模块结构简单、控制容易、质量轻、制造成本低廉。其缺点是只能实现二维平面内的运动,单元模块结构和蛇体的球形铰链关节结构相似度也不高。
(2)正交连接
正交连接(图5b)是指组成蛇形机器人的单元模块间仍为转动副,但相邻转动副的轴线相互垂直,且均垂直于蛇形的纵轴线。这种设计方案的优点可实现空间的三维平面内的运动,且结构相对简单,制造成本也相对低廉。缺点是三维平面内的运动需要两个相邻关节间的相互配合,且工作空间不是完整的三维平面。
(3)万向节连接
万向节连接(图5c)是指组成蛇形机器人的单元模块均以十字万向节连接,关节的一端能够向任意方向运动。万向节连接构型具有完整的三维工作空间和良好的空间运动灵活性,能满足复杂环境适应性要求。但具有结构复杂、难以控制等缺点。
本文综合平行连接、正交连接、万向节连接的优缺点,在此基础上重新设计了一种具备3自由度的结构设计方案,即行星齿轮差动结构(图5d)。
1.3.2 行星齿轮差动结构

图6 球形铰链结构简图
球形铰链连接是指组成蛇形机器人的单元模块间均以球形万向节连接,关节的一端能够向任意方向运动。球形铰链(图6)由球铰盖、球铰座、球铰组成。球铰盖和球铰座组成一个球腔,球铰镶嵌在球腔内,其中θmax为最大独立转角。球形铰链具有易保证加工精度、独立转角范围大、间隙小等优点,但由于球形铰链制造成本昂贵,且承力性能不强,控制难度大,常用虎克铰链加一个转动副代替球形铰链[11]。

1-锥齿轮1;2-锥齿轮2;3-锥齿轮3; 4-锥齿轮支撑套; 5-连接架;6-锥齿轮支撑轴图7 行星齿轮差动耦合机构
本文所设计的行星齿轮差动耦合结构(图7),由三个等距锥齿轮互相耦合,锥齿轮3通过支撑套4固定在支撑轴6上 。2个舵机通过齿轮组驱动锥齿轮1和2差动耦合带动锥齿轮3实现俯仰与偏航功能 :当两个舵机以相同速率同向转动时,两个伞齿轮驱动连接架做俯仰运动;当两个舵机以相同速率反向转动时,两个锥齿轮驱动连接架做偏航运动;当两个舵机以不同的速率转动时,两个锥齿轮驱动连接架做俯仰和偏航的组合运动。故此结构可很好的代替虎克铰功能,且耦合驱动使得驱动力更大;齿轮传动使得传动精度更高。此结构可实现的俯仰及偏航2个自由度再加上回转舵机所能实现的1个回转自由度,可实现严格意义上的3自由度,运动空间更大。
1.4 驱动方案
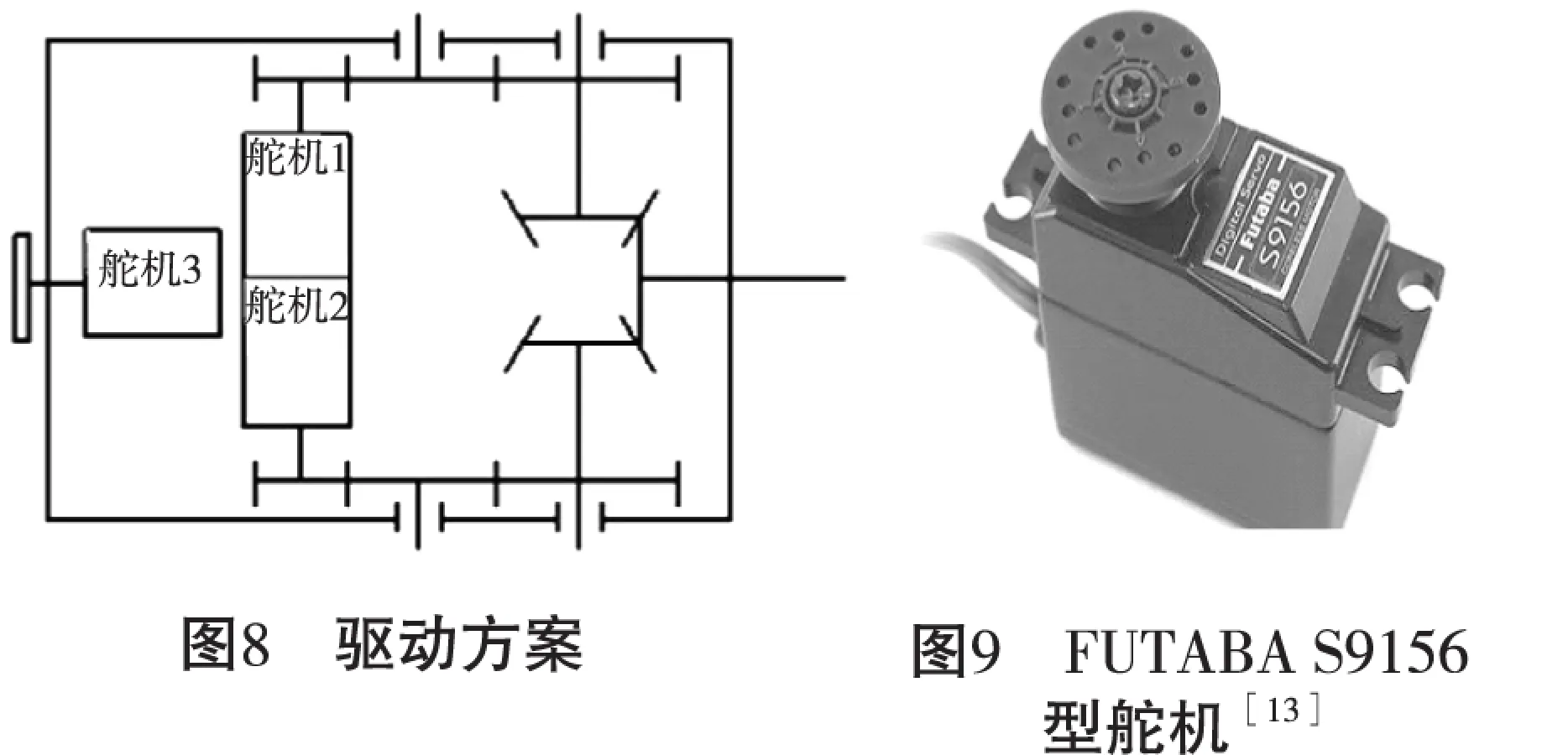
仿生蛇形机器人的驱动方案多样,有人工肌肉驱动[12]、电机驱动[13]等。目前大多数采用的是伺服电机驱动,本次设计采用的是舵机配以减速齿轮组的驱动方案(图8):舵机转动将力和力矩传出,经由减速齿轮组减速,以提高舵机的驱动力和驱动力矩,就能以较小的驱动力驱动整个蛇形机器人样机,保证蛇形机器人的运动功能的实现。舵机选取FUTABA公司所生产的FUTABA S9156[14](图9)型舵机。此舵机的特点是转速快、驱动力矩大、质量轻、结构紧凑,其主要性能参数如表1 。

表1 FUTABA S9156型舵机参数
2 仿生蛇形机器人单元结构设计
2.1 模块化设计

图10 蛇形机器人虚拟样机
本次设计采用模块化设计方法,蛇形机器人只需在单元模块设计完成之后将单元模块进行有序组装即可。模块化设计具有三个显著的特点:通用性、鲁棒性和经济性。通用性主要表现在未知的环境下,可以感知环境并做出决策的可重构系统以适应各种环境[15];鲁棒性是指可以利用蛇形机器人的冗余度和全局反馈补偿个别单元体的误差,且还具有修复能力,当某一个单元体失效时,可以将此单元模块舍弃,并由剩下的单元体代替完成其原有的功能;经济性是指蛇形机器人的单元模块应尽量使用相同的零件,由于相同的模块设计、加工、制造过程都是相同的,这样就不需要额外的设计加工,从而减少了单元模块的制造成本,达到控制成本的目的。
2.2 蛇形机器人的机械结构设计
蛇形机器人的单元模块机械结构设计是蛇形机器人总体设计的核心部分(图10),本次设计采用到的蛇体单元材料主要有45钢、40Cr、超硬铝合金。齿轮的相关设计参数主要由机械设计[15]确定,选取的齿轮总传动比为2,其中舵机齿轮和悬臂齿轮传动比为2,悬臂齿轮和伞齿轮传动比为1,依次确定轴承、传动轴、支撑轴、齿轮支撑板、轴承座等相关尺寸。由机械设计手册单行本[16]选取了轴承,之后根据轴承尺寸设计传动轴和支撑轴、连接架、从动轮架、从动轮等尺寸,其中从动轮只起到改变蛇身与地面摩擦系数的作用。
2.3 蛇形机器人的主要技术参数
2.3.1 仿生蛇形机器人的尺寸及质量参数
蛇形机器人的单元体尺寸是从回转舵机转盘到连接架外端面的直线尺寸,所示蛇形机器人总长度为1 809.1 mm。机器人的质量主要包括机械结构部分质量、舵机质量、紧固件质量、控制部分质量。其中机械部分的质量所占比重最大,机械部分质量在UG中进行三维建模后输入各个零件的密度之后进行质量估算。紧固件部分质量以200 g计算,控制部分质量以300 g计算,仿生蛇形机器人的总体质量约为5.213 3 kg,具体参数如表2所示。

表2 仿生蛇形机器人的尺寸及质量参数
2.3.2 相邻关节转动范围

图11 蛇形机器人临界转角示意图
本文1.3.2对球形铰链进行了阐述,球形铰链中当球铰运动到一定程度时会与球铰盖发生碰撞,无法继续运动,球铰原始位置到极限位置的转动角度定义为最大独立转角θmax。蛇形机器人的运动是由相邻关节间的相对转动从而进行驱动,但是受蛇形机器人机械结构的限制,相邻关节的转动范围有限,而当相邻关节的转动角度达到某一数值后,相邻关节之间就会发生相互碰撞,从而影响蛇形机器人的正常运动。如图11所示,图中虚线部分代表单元模块原始状态,实现部分表示单元模块即将发生碰撞时的状态,本文将此转动角度称为临界转角φ,即∠COD:

(1)
2.4 蛇形机器人的运动控制
本次设计的蛇形机器人具有3个自由度:俯仰、偏航和回转。每个单元模型共有3个舵机,其中2个舵机通过齿轮组驱动行星齿轮差动耦合实现俯仰与偏航功能,另1个舵机实现回转功能。由单片机协调控制所有舵机的动作,单片机给舵机脉冲信号,使舵机根据信号输出不同的转动速度和角位移,舵机齿轮从而驱动行星齿轮差动结构进行俯仰或偏航运动,机器人蛇头部分安装有反馈运动状态的力觉传感器,从而可以将传感器采集到的信号读回计算机进行反馈控制,达到控制相邻关节转动范围的效果。
3 结论
本文通过对生物蛇的身体结构分析,采用模块化的设计方法,设计了一种具有行星齿轮差动结构的蛇形机器人,可实现偏航、俯仰、回转等运动,并用UG建立了虚拟样机,对蛇形机器人的成功研制具备实用价值。
[1]SHirose.Biologicallyinspiredrobots:snakelikelocomotorandmainpulators[J] .OxfordUniversityPress. 1993:351-363.
[2]S.Hirose.TheBio-mechanismsofSnake:roboticsresearchinhirose-yonedalaboratory[J].TokyoInstituteofTechnologyPress,1997:102-107.
[3]R.Worst.RoboticSnakes[C]//ThirdGermanWorkshoponArtificialLife.TechnischeUniversitaetMünchen, 1998: 113-126.
[4] 刘华,颜国正,等.仿蛇变体机器人的运动机理研究[J].机器人,2002, 24(2):154-158.
[5] 叶长龙,马书根,等.蛇形机器人的转弯和侧移运动的研究[J].机械工程学报,2004,40(10):119-123.
[6] 叶长龙,马书根,李斌,等.三维蛇形机器人巡视者Ⅱ的开发[J].机械工程学报,2009,45(5):128-133.
[7] 崔春.仿生蛇的设计及其运动仿真[D]. 哈尔滨.哈尔滨工业大学,2009.
[8] 郭燕.蛇形机器人的运动控制及步态优化[D]. 广州:华南理工大学, 2011.
[9] 万小丹.蛇形仿生机器人的研究[D].合肥.中国科学技术大学,2008.
[10] 邝邵南.基于多传感器数据融合的蛇形机器人桥梁缆索缺陷自动检测方法研究[D].广州.华南理工大学,2012.
[11] 高金莲,韩英强,李波,等.并联机器人球铰链的仿真设计[J].机械设计,2007,24(2):53-55.
[12] 章军、须文波.人工肌肉多自由度弯曲柔性关节的仿生蛇形机器人[J].江南大学学报(自然科学版),2006,5(3):337-340.
[13] 刘洋,李世其,等.单马达驱动蛇形机器人的设计研究[J].中国机械工程,2009,20(4):401-404.
[14]http://www.futaba-rc.com/servos/digital.html.
[15] 陈丽,王越超,等.蛇形机器人的研究现况与进展[J].机器人,2002,24(6):559-563.
[16] 邱宣怀,郭可谦,等主编.机械设计:第四版[M].北京.高等教育出版社,2011.
[17] 成大先,主编.机械设计手册·单行本·轴承[M].北京.化学工业出版社,2004.
The structure design for a bionic snake-like robot
NIE Yu,ZHANG Zhuo,LIN Yun
Through analysis body structure and motion characteristics of snake and simulation abstraction of its skeletons, a kind of bionic snake-like robot is designed, which adopts differential structure of planetary gear and has three degrees of freedom. This snake-like robot can achieve the pitch, yaw, rotation and other motion, through steering gear driving planetary gear differential coupling at different rate. This snake-like robot is equipped with sensors to perceive the environment, which makes it have strong drive capability and high transmission precision. The critical angle and other technical parameters are get by establishing virtual prototype in UG.
snake-like robot, structure design, skeleton abstraction, differential structure of planetary gear
TH126
A
1002-6886(2016)06-0040-05
聂宇(1991-),男,贵州毕节人,助工,学士学位,主要研究方向为仿生蛇形机器人技术。 张琢(1985-),男,贵州思南人,贵阳学院机械工程学院讲师,哈尔滨工业大学硕士学位,主要研究方向为仿生机器人技术。 林芸(1965-),女,贵阳学院机械工程学院院长,教授,西安交通大学材料工程硕士,主要研究方向为机械设计与选进制造技术。
2016-06-05
猜你喜欢
军事文摘(2021年18期)2021-12-02
民用飞机设计与研究(2019年2期)2019-08-05
自动化学报(2019年6期)2019-07-23
北京汽车(2019年6期)2019-02-12
中国特种设备安全(2018年10期)2018-12-18
汽车电器(2018年10期)2018-11-01
电子制作(2018年1期)2018-04-04
金色年华(2017年13期)2017-04-04
制造业自动化(2017年2期)2017-03-20
舰船科学技术(2015年8期)2015-02-27
