基于K60的四轴飞行器环境信息采集系统设计
2016-12-21 07:14任晓明贾永兴高华平
网络安全与数据管理 2016年23期
伏 勋, 任晓明,贾永兴,罗 桢,高华平
(上海电机学院 电气学院,上海 200240)
基于K60的四轴飞行器环境信息采集系统设计
伏 勋, 任晓明,贾永兴,罗 桢,高华平
(上海电机学院 电气学院,上海 200240)
为能全面实时地采集环境信息数据,设计了四轴飞行器环境信息采集系统。本设计采用Freescale K60微控制器作为主控芯片,MPU6050惯性测量传感器和AK8975三轴磁罗盘作为惯性导航单元,使用PID控制算法并以PWM方式驱动三相无刷电机,从而控制四轴飞行器飞行姿态。通过2.4 GHz和5.8 GHz频段将采集到的温/湿度、PM2.5/PM10浓度、摄像头采集图像等信息传输到控制台。经测试,该系统满足不同环境下及时采集数据、有效视频监测的要求,对实际现场监测有一定的应用价值。
四轴飞行器;环境信息采集;K60微处理器
0 引言
近年来空气污染引起了公众的热议,如何有效、及时地处理空气污染问题成为焦点。本文基于环境信息数据的采集,设计了四轴飞行器环境信息采集系统。传感器技术和控制理论的不断发展,尤其是微电子和微机械技术的逐步成熟,使四轴飞行器的自主飞行控制得以实现,并成为国际上的研究热点[1]。
文献[1] 采用STM32系列32位处理器作为主控制器,使用ADIS16355惯性测量单元等传感器用于姿态信息检测,使用PID控制算法进行姿态角的闭环控制。文献[2] 采用 STM32作为主控芯片,三轴加速度传感器MPU6050作为惯性测量单元,通过2.4 GHz无线模块和遥控板进行通信,最终使用PID控制算法以PWM方式驱动电机实现了四轴飞行器的设计。文献[3]采用 ARM处理器控制无刷直流电机,并且通过加速度传感器和陀螺仪的反馈数据进行飞行器的平衡控制和姿态调节。
本文设计了四轴飞行器环境信息采集系统,以K60微处理器为核心,采用惯性测量模块MPU6050姿态获取技术,搭建四轴飞行器控制系统。设计包括四轴飞行器控制、环境信息采集、控制台三部分。其中,四轴飞行器采用人工遥控控制;环境信息采集以模块化为主,将图像、温湿度、PM2.5和PM10各个模块进行数据采集显示输出;控制台负责数据交互与遥控。
1 系统设计方案
根据四轴飞行器实际的飞行需求和设计要求,系统采用主控单元K60采集环境信息,处理由温湿度检测模块、PM2.5/ PM10检测模块反馈的数据,并在参数显示器上显示;TS832发射端将摄像头采集到的图像信息通过工作频率5.8 GHz无线传输到遥控器上的RC832接收端,并反映到图像显示器;领航者飞行控制器采用STM32F407VG芯片控制算法求解电机转速,连接T6EHP-E接收机,通过2.4 GHz频段与遥控器进行无线传输,由遥控器操作四轴飞行器执行相应指令,实现电机转速调整,进而实现姿态控制。系统设计框图如图1。
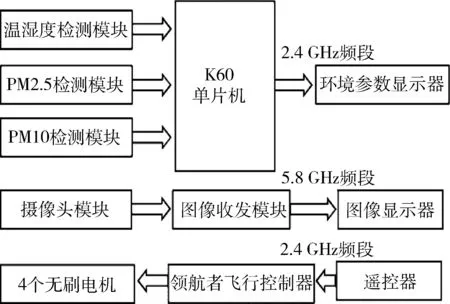
图1 系统设计框图
2 硬件设计
2.1 四轴飞行控制器
四轴飞行控制器的核心有MPU6050惯性测量传感器、AK8975三轴磁罗盘、MS5611高精度气压仪。MPU6050惯性测量传感器驱动方式采用I2C接口,时钟引脚 SCL连接到控制器的PB6,数据引脚连接到控制器的PB7,数据中断引脚连接到控制器的PD7,其硬件原理图如图2所示。
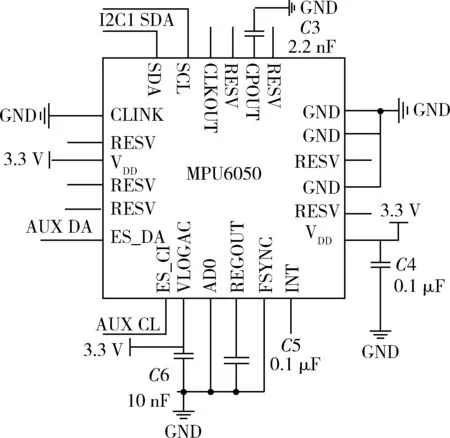
图2 MPU6050硬件原理图
AK8975三轴磁罗盘带有高敏感度霍尔传感器,通过增强信号处理器体系结构,实现宽动态测量范围和低电流消耗,不需外部时钟[4]。
MS5611高精度气压仪由压阻传感器和传感器接口组成,将测量的补偿模拟气压值经ADC转换成24位数字输出,采用I2C串行接口,串行时钟SLCK和串行数据SDA与外部控制器进行数据传输[5],其硬件原理图如图3所示。
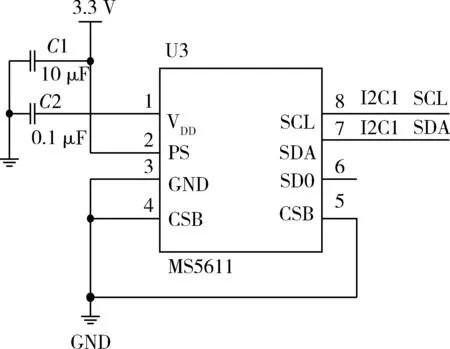
图3 MS5611硬件原理图
设计选用F450型号的四轴飞行器机架,该飞行器载重量大、稳定性强、加装区域大、姿态控制简单。四轴飞行器采用人工遥控控制,通过飞机前部摄像头,将拍摄的影像传给遥控器,并在显示器上显示,有利于操作人员对飞行器做出正确控制。
2.2 环境信息采集
2.2.1 图像信息的采集
本系统采用700线摄像头、TS832发射端和RC832接收端,摄像头模块拍摄现场状况,反馈到机架上的图像收发模块,通过5.8 GHz频段无线传输到遥控器上的图像收发模块,反映到图像显示器(4.3英寸)上。图4所示为四轴飞行器飞行过程中拍摄到的一张图像。

图4 实拍图像
2.2.2 温湿度检测模块
本系统采用的是DHT11数字温湿度传感器模块。DHT11是一款含有已校准数字信号输出的温湿度复合传感器,它应用专用的数字模块采集技术和温湿度传感技术,确保其具有极高的可靠性与卓越的长期稳定性,传感器包括一个电阻式温湿元件和一个NTC测温元件,并且与一个高性能的8位单片机相连接。
通过温湿度检测模块来检测环境中的温湿度,通过K60单片机来处理传感器反馈的数据,该数据通过2.4 GHz频段无线传输到遥控器上的环境参数显示器上,得到某一天的温湿度数据如表1。
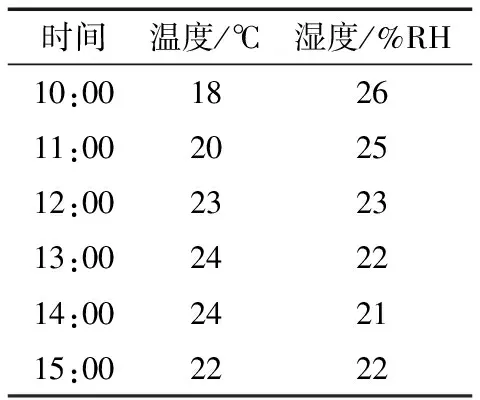
表1 温湿度数据
2.2.3 PM2.5和PM10浓度采集
本系统采用SDS011激光PM2.5传感器,能够得到空气中 0.3~10 μm悬浮颗粒物浓度,对PM2.5浓度及PM10浓度进行检测。其具有数据准确、响应快速、集成度高、分辨率高、数据稳定可靠、数字化输出等特点[6]。
通过SDS011激光PM2.5传感器来采集环境中的各种参数,经K60单片机处理传感器反馈的数据,该数据通过2.4 GHz频段无线传输到遥控器上的环境参数显示器上。得到几组PM2.5和PM10浓度的日变化数据,如表2所示。将测得数据与当地气象局监测数据作比较,其PM2.5有±1.2%偏差,PM10有±2.4%偏差,测量结果准确度较高。
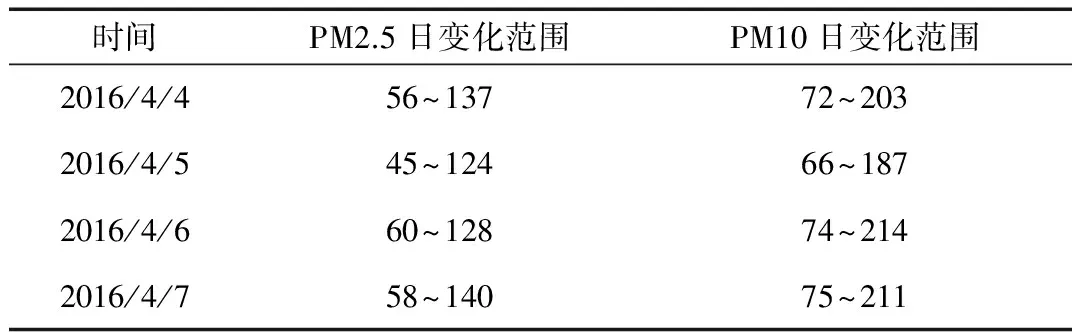
表2 PM2.5/PM10浓度日变化数据 (μg/m3)
2.2.4 显示反馈数据
本系统采用0.96英寸OLED液晶屏连接到K60芯片上,实时显示数据,如图5所示。
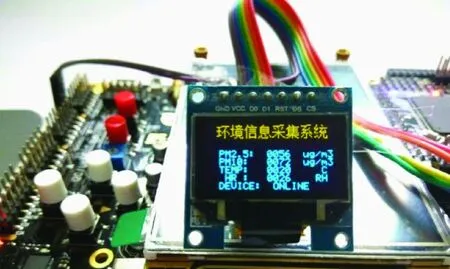
图5 实时数据显示
2.3 控制台
控制台部分的研究涉及到遥控、OLED显示、图像显示、无线数据传输。OLED显示和图像显示已在环境信息采集中介绍。数据无线传输选用nRF24L01+无线接收模块。nRF24L01+是一款工作在2.4~2.5 GHz世界通用ISM频段的单片无线收发器芯片。无线收发器包括:频率发生器、增强型SchockBurstTM模式控制器、功率放大器、晶体振荡器、调制器、解调器。输出功率、频道选择和协议的设置可以通过SPI接口进行设置。其拥有极低的电流消耗:当工作在发射模式下,发射功率为6 dBm时电流消耗为9 mA,接收模式时为12.3 mA。掉电模式和待机模式下电流消耗更低。nRF24L01+模块和K60单片机的连接图如图6所示。
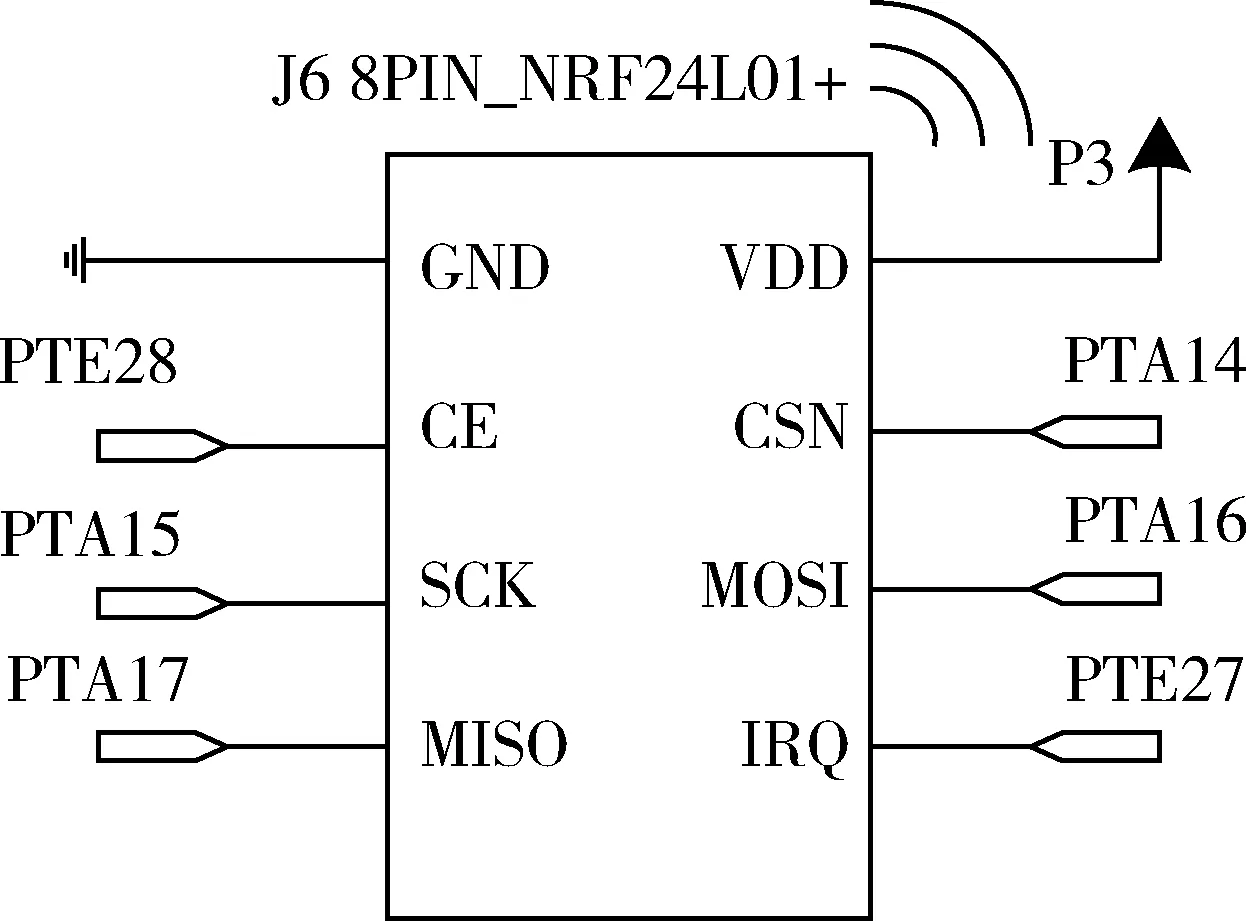
图6 nRF24L01+模块和K60单片机的连接图
3 软件设计
系统采用模块化结构设计,使用IAR开发环境,系统功能组态更加方便。基本程序模块有温湿度采集模块、PM2.5/PM10采集模块、OLED显示模块、nRF24L01+无线收发模块等,各个模块既能独立地实现各部分功能,又可以共同工作达到系统的设计要求。
3.1 数据发送
主控芯片K60按照中断时间间隔向DTH11温湿度传感器、PM2.5传感器发送起始信号,将读出的温湿度、PM2.5/PM10等信息进行整理校验后,通过无线收发模块发送给控制终端,数据采集程序流程图如图7所示。采用定时器中断的方式完成采集任务,本设计采用每2 200 ms PIT0中断一次,采集一次数据。由于时间间隔较短,各传感器的数据显示不断更新,从而能够实时检测到各环境参数的变化情况。
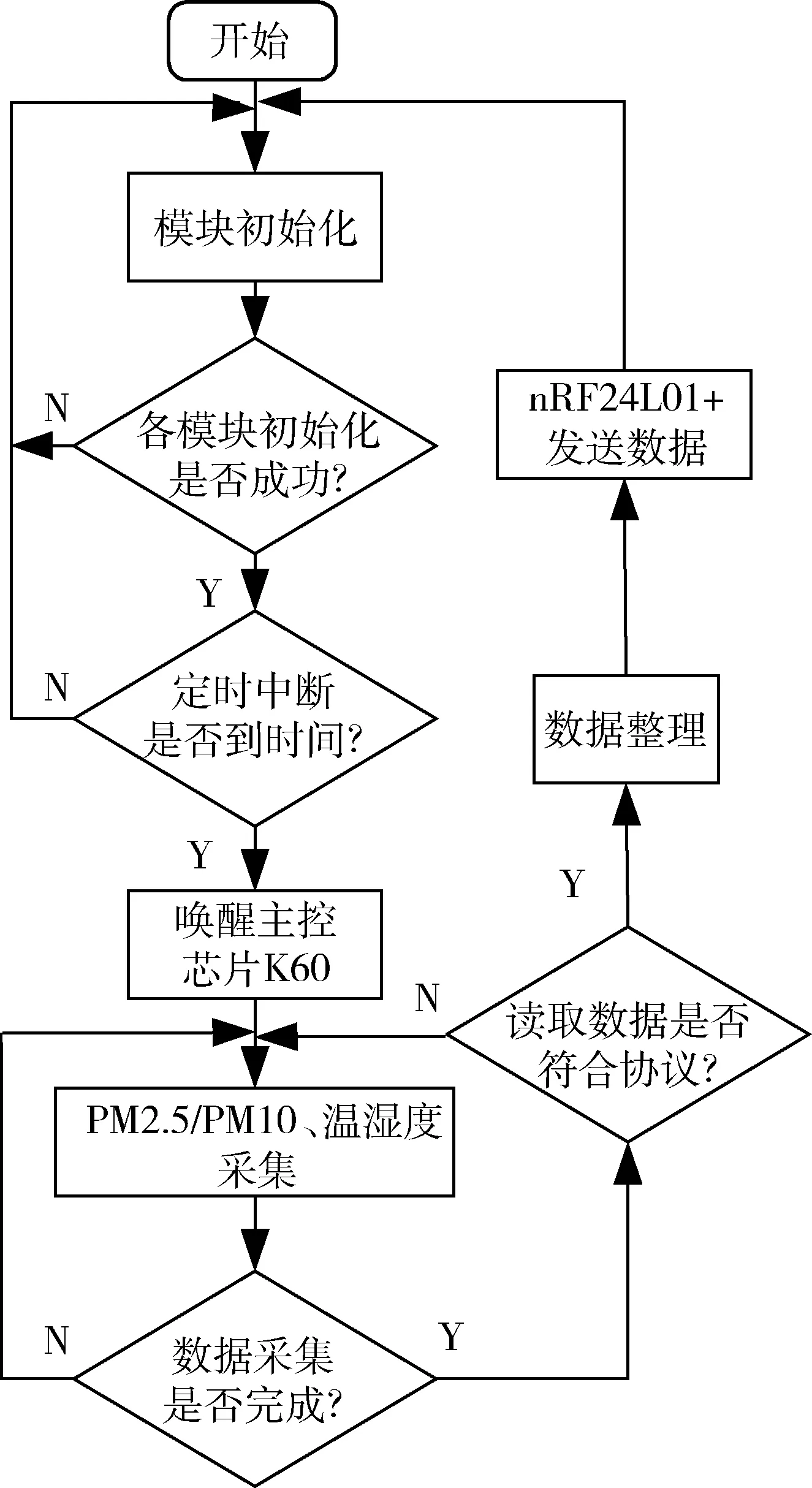
图7 数据采集程序流程图
3.2 数据接收
在中断时间到达后,K60主控芯片发送指令,nRF24L01+模块接收数据,判断数据是否正确,如果数据正确,则进行OLED显示,否则继续接收数据。数据接收程序设计流程图如图8所示。
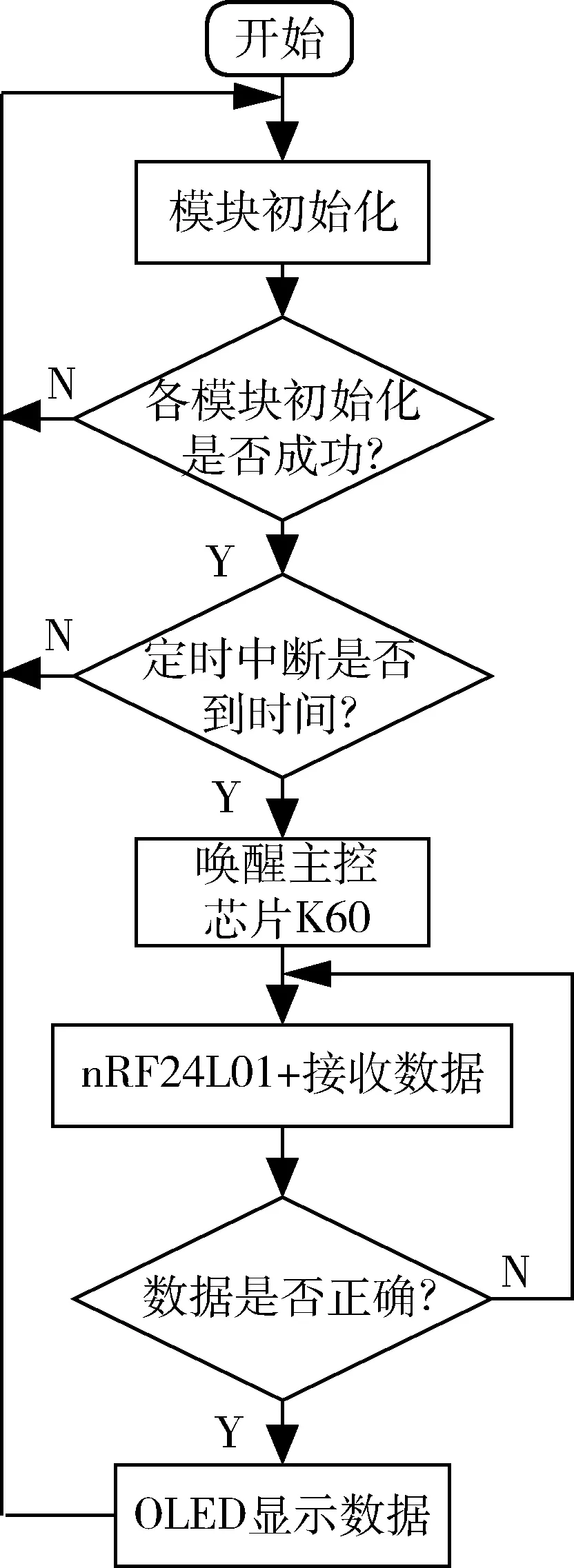
图8 数据接收流程图
4 结论
本文介绍了四轴飞行器环境信息采集系统的设计,提出了系统的整体设计方案,并分别对系统的软硬件进行设计。系统以K60为主控制器,通过2.4 GHz和5.8 GHz无线模块进行通信控制,通过MPU 6050进行姿态获取,使用反馈控制算法进行电机控制。安装调试后,验证了该系统可以实现四轴飞行器的姿态控制;摄像头正常拍摄影像且实时发送给遥控端接收器;飞机在飞行时能够采集环境中的温度、湿度、PM2.5、PM10等信息,并且能够通过2.4 GHz频段无线传输到控制台。
[1] 刘峰,吕强,王国胜,等.四轴飞行器姿态控制系统设计[J].计算机测量与控制,2011,19(3):583-585.
[2] 常国权,戴国强.基于STM32的四轴飞行器飞控系统设计[J].单片机与嵌入式系统应用,2015,15(2):29-32.
[3] 陈海滨,殳国华.四旋翼飞行器的设计[J].实验室研究与探索,2013,32(3):41-44.
[4] 李尧.四旋翼飞行器控制系统设计[D].大连:大连理工大学,2013.
[5] BOUABDALLAH S. Design and control of quadrotors with application to autonomous flying[D].Switzerland:Lausanne EPFL,2007.
[6] 付佳贺.四轴飞行器的设计与研究[D].成都:电子科技大学,2015.
伏勋(1991-), 女,硕士研究生,主要研究方向:电气智能化控制与检测。
任晓明(1977-),男,博士,副教授,主要研究方向:高压测试技术及雷电防护。
Design of the quadrocopter environmental information acquisition system based on K60
Fu Xun,Ren Xiaoming,Jia Yongxing, Luo Zhen,Gao Huaping
(School of Electrical Engineering, Shanghai Dianji University, Shanghai 200240, China)
In order to collect environmental information data in real time, the quadrocopter environment information collection system was designed. The design used Freescale K60 microcontroller as the master chip, inertial measurement sensor MPU6050 and three axis magnetic compass AK8975 as inertial navigation unit. The design used PID control algorithm and PWM method to drive the three-phase brushless motor to control the quadrocopter’s flight attitude. The temperature/humidity, PM2.5/PM10 concentration, camera image and other information were transmitted to the console through the 2.4 GHz and 5.8 GHz frequency bands. The experiment showed that the system can meet the requirements of data collection and video monitoring in different environment. It has application value to the actual field monitoring.
quadrocopter; environmental information collection; K60 micro controller
TP27
A
10.19358/j.issn.1674- 7720.2016.23.028
伏勋, 任晓明,贾永兴,等. 基于K60的四轴飞行器环境信息采集系统设计[J].微型机与应用,2016,35(23):96-99.
2016-08-13)
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
无线互联科技(2021年4期)2021-04-21
四川蚕业(2020年3期)2020-07-16
漳州职业技术学院学报(2019年1期)2019-11-16
小猕猴智力画刊(2019年3期)2019-04-19
电子制作(2018年23期)2018-12-26
电子制作(2018年19期)2018-11-14
电子制作(2018年11期)2018-08-04
电子制作(2018年2期)2018-04-18
西安工程大学学报(2016年6期)2017-01-15