
下穿既有铁路项目多技术融合监测方法研究
2016-12-30 01:41彭理
铁道勘察 2016年6期
彭 理
(铁道第三勘察设计院集团有限公司,天津 300251)
下穿既有铁路项目多技术融合监测方法研究
彭 理
(铁道第三勘察设计院集团有限公司,天津 300251)
地铁隧道等地下工程在下穿既有铁路时,施工监测对项目的安全保障至关重要。监测的主要内容为既有铁路路基和构筑物位移形变和既有轨道的几何形变。以合肥地铁下穿既有铁路为例,详细研究常规手段监测、自动测量机器人以及静力水准仪自动化监测等多项技术融合监测。
轨道位移监测 自动化监测 自动测量机器人 静力水准仪
1 概述
随着城市不断发展扩张,城市内的既有铁路像一道屏障阻断了铁路两侧的交通,通过下穿隧道的方法能够打通铁路两侧的道路交通,为城市的发展提供新的空间。这样就对下穿既有铁路的施工安全提出了很高的要求,其中既有铁路及附属构筑物的监测对地铁下穿施工的顺利进行及既有铁路运营安全保障有至关重要的作用。
2 监测的主要内容和目的
根据项目所处位置和地质情况不同,监测的内容也不尽相同,主要有以下几个重点的监测内容:
(1)铁轨水平位移监测;
(2)既有铁路路基沉降监测;
(3)构筑物形变监测,如铁路桥、框构等。
3 监测精度指标要求
根据规范要求和中国铁路总公司的相关管理办法,基础变形监测精度指标应满足的要求如表1所示。

表1 基础变形监测精度 mm
4 监测方案设计的主要内容
4.1 基础控制基准的设计
基准点的测设:包括水平位移基准点和沉降监测基准点的布设。
水平位移监测需要建立相对独立的平面坐标系统;基准点应选择在远离施工影响的区域;基准点间应具备和前后点通视的条件。水平位移基准点采用导线的方法进行测量,精度等级为一等(如表2)。

表2 水平位移基准网的主要技术要求
沉降监测基准网可建立独立的高程基准,也可和当地的高程基准进行联测后确认。基准点应设在远离项目施工影响区的稳固位置,布设位置满足准确、方便测量的需要(如表3)。
表3 沉降监测网主要技术要求和方法 mm
4.2 铁轨几何形态监测方案设计
铁轨几何形态监测方案包括监测点的布设,自动测量机器人监测数据采集系统,数据实时传输、处理系统和网上发布系统。
(1)自动测量机器人连续测量先要选取置镜点,保证置镜点相对于监测点的角度并能清晰看到棱镜(视线不能穿越树杈、钢丝网等障碍物)。测量时需要使用正镜和倒镜分别观测监测点,两次较差满足限差要求后方可取用其值。如果自动测量机器人布设在露天环境,应考虑到下雨、冰冻等影响,需要采取一定的防护措施(如制作防雨罩),同时保证电力供应。
选取的置镜点可以是平面监测的基准点或者是稳固的非施工影响范围的任意适合点,测量时可采用后方交会模式取得置镜点坐标。
(2)铁轨几何形态监测点用于监测轨道的平面变化,故将监测点使用扣件直接与轨道相连,将棱镜通过钢质卡件与铁路钢轨牢固锁定在一起,延长杆将棱镜往铁轨外侧伸出足够距离,以保证火车经过时车轮与观测棱镜不会发生碰撞,棱镜安装在轨道上效果如图1所示。

图1 棱镜头安装轨道后效果
监测点布设要牢固可靠,避免钢质卡件松动给列车运营造成危害。同时,监测点位需要在同里程处左右钢轨各设置一个监测棱镜点,以便监测铁轨轨距及水平的变化。
(3)数据实时处理和网上发布系统BS:一是数据采集模块,包含自动化测量全站仪、通信模块,通过处理器实时将全站仪的数据导出并自动进行处理,删除粗差,通过移动网数据采集控制模块进行集成。可以实时采集各监测点的监测信息并发回数据处理服务器。二是网络服务器数据处理系统,实时处理采集器传回来的数据,发送到网络平台进行实时发布。
4.3 既有铁路路基沉降监测
考虑到所监测的铁路线为既有运营铁路,为避免上线监测对正常铁路运营带来的干扰及满足监测精度、频度的要求,决定采用液态静力水准仪来完成该项监测项目。静力水准是一种精密液位测量系统,该系统设计用于测量多个测点的相对沉降,其监测沉降的精度可达0.1 mm,并可实现数据的自动采集、分析及成果发送,既可以在满足监测精度要求的条件下减少对铁路运行的影响,同时也避免了作业人员因上线作业而带来的人身风险。根据该工程的实际情况,决定在线路两侧路肩及两条铁路之间布设带状静力水准仪系统(如图2所示)。

图2 静力水准仪布设
4.4 周边环境形变监测
线路两侧地表沉降监测采用人工水准测量方法来实现。使用高精度电子水准仪进行二等水准测量来获取现场地表沉降点高程信息。
地表沉降监测点的布设采用植入钢筋、周边用水泥砂浆固定的方法埋设。为保护测点不受破坏,地表沉降监测点采用窖井埋设。
4.5 各监测技术方案融合设计
针对不同的监测目的,采用适合的监测技术,利于对目标物形变的针对性分析。采用集成设计将各监测技术进行融合,通过对采集到监测数据的综合分析,相互验证和对比分析,以得到高精度、可靠的监测成果。
(1)测量机器人自动化监测与静力水准监测系统融合方案
两个监测系统有共同的数据采集和传输分析模式,具备系统模式融合的硬件基础。需要在后台数据服务器增加数据接收格式转换的模块及功能(即增加系统数据获取源)。将两套系统监测的数据放到一起,用相同的模型进行计算与分析:①在静力水准仪安置墩上加设测量机器人监测的观测点位,同基础上增加一个强制归心棱镜。静力水准仪数据采集为每5 min一次,自动测量机器人数据采集为每2 h一次,所有自动测量机器人数据采集时刻静力水准仪也将有观测数据。②数据采样间隔时间段一致。对比分析中将采样间隔设置一致,因受铁路运营影响,部分轨道监测点无法同期完成全部观测,静力水准采集在该时段内也会受影响。数据处理时应将该部分不合格数据剔除。③数据分析处理。
(2)常规精密水准测量与静力水准监测系统融合方案
在3条静力水准仪观测带每一台仪器的安装墩上都预先埋设钢质沉降标,监测人员定期进行二等水准测量。如此可以得到各静力水准仪监测点二等水准测量的沉降量,对比二者监测数据即可相互验证系统的稳定性和可靠性。
(3)测量机器人自动化监测系统与常规精密水准融合
在3条静力水准仪观测带每一台仪器的安装支架上都预先通过焊接的方法固定棱镜。
这样与预先埋设在静力水准仪安装墩上的沉降监测标便为同一监测位置,对比二者监测数据即可相互验证系统的稳定性和可靠性。
5 多技术方案融合工程实例数据分析
各系统沉降曲线对比如图3、图4所示。
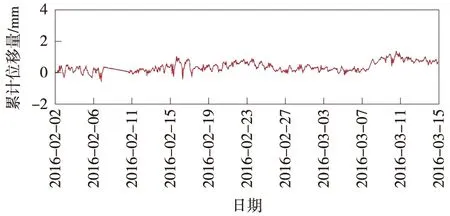
图3 L307号沉降点自动测量机器人观测
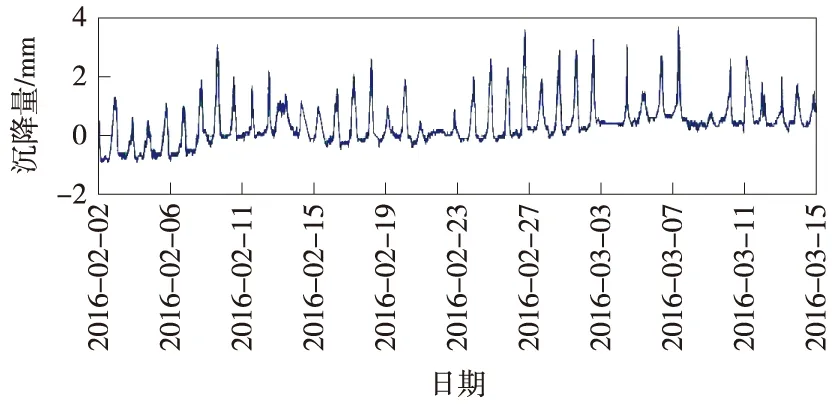
图4 L307号沉降点静力水准仪观测
图3、图4为从2016年2月2号至3月15号同一观测位置静力水准仪及自动测量机器人两套系统所测沉降曲线,其中静力水准仪所测结果由于受温度等外界情况影响会在每天固定时间出现较大波动(图4中突出的单线)。对比两图可以看出,在这一时间段内两套监测系统沉降趋势都较为稳定,到监测结束均较2月2号有0.6 mm左右的回升,说明两套自动化监测系统所测结果满足方案的精度要求。

图5 铁路路基沉降监测点三种不同监测手段监测沉降量对比
从图5可以看出,静力水准仪及自动测量机器人监测系统与传统的二等水准测量所测结果差值均在1 mm以内,说明本项目自动监测系统测量精度较高且稳定。

图6 铁轨209号监测点位移曲线
209号监测点为铁轨几何形态监测点,位于隧道左线正上方,从图6可以看出,该监测点形变在整个监测周期里较为稳定。本项目线上5股道共布设100个铁轨几何形态变化监测点,9个电气化接触杆沉降监测点。在整个监测周期内各监测点变形量不大,均未发生超限。
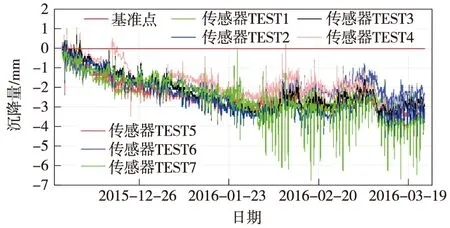
图7 一条静力水准仪观测带沉降曲线
图7为铁路东侧路基静力水准仪观测带在整个观测周期内的沉降曲线,从图7可以看出,铁路路基最大沉降在4 mm左右,到监测后期趋小并略有回升,最终下沉量在3 mm左右。
[1] 崔天麟,肖红渠,王刚.自动化监测技术在新建地铁穿越既有线中的应用[J].隧道建设,2008,28(3):359-361
[2] 张成平,张顶立,骆建军,等.地铁车站下穿既有线隧道施工中的远程监测系统[J].岩土力学,2009,30(6):1861-1866
[3] 胡明庆,王金峰,李双平,等.地铁盾构穿越铁路专项监测[J].人民长江,2010(20):94-96
[4] 张建坤,陈昌彦,白朝旭,等.影响静力水准监测质量的关键技术问题探讨[J].工程勘察,2012(9):73-77,82
[5] 王荣权.轨道交通地下工程施工对周边环境影响的监测[J].铁道勘察,2008(2)
[6] 刘永中.地铁隧道测量机器人自动化变形监测研究与应用[J].铁道勘察,2008,28(4):1-3
[7] 李明.自动化监测技术在天津地铁 3 号线金狮桥站—天津站站盾构穿越高速铁路工程中的应用[J].隧道建设,2014,34(4):368-371
[8] 杨祝华.地铁变形监测[J].西部探矿工程,2006(4):165-166
[9] 张飞进.盾构施工穿越既有线地表沉降规律与施工参数优化[ D].北京:北方交通大学,1999:4-15
[10]徐明伟,张建民.高速铁路区域地面沉降监测方法的评价分析[J].铁道勘察,2015(1)
The Program of Deformation Monitoring About Underground Shield Machines Beneath the Existing Railway by Multiple Technologies
PENG Li
2016-08-25
彭 理(1982—),男,2006年毕业于西南交通大学地理信息系统专业,工程师。
1672-7479(2016)06-0017-04
TU196+.1; TU433
A
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18
科学技术创新(2022年11期)2022-04-20
华中建筑(2022年4期)2022-04-14
科学咨询(2020年43期)2020-03-04
学苑创造·A版(2019年4期)2019-05-10
新商务周刊(2018年7期)2018-12-08
中国锰业(2018年3期)2018-07-11
山东工业技术(2017年24期)2017-12-29
中小企业管理与科技·中旬刊(2014年2期)2014-04-01
组合机床与自动化加工技术(2014年11期)2014-03-01
