
基于定子电流矫正的异步电机间接定子磁场定向控制
2017-01-03 03:05邵佳俊黄文新杨驹丰
电工技术学报 2016年23期
邵佳俊 黄文新 杨驹丰 杨 璐
(南京航空航天大学自动化学院 南京 210016)
基于定子电流矫正的异步电机间接定子磁场定向控制
邵佳俊 黄文新 杨驹丰 杨 璐
(南京航空航天大学自动化学院 南京 210016)
提出一种基于定子电流误差的间接定子磁场定向矫正控制方法。分析了定子dq轴电流以及定子磁链的关系,推算出q轴电流对定子磁场的去磁分量,在负载变化时加大d轴电流补偿该分量,实现定子电流dq轴分量的分解。采用了磁链开环的矢量控制,避免了传统磁场定向矢量控制在低速时磁场观测的复杂性和不准确性。然而为保证磁场定向的准确性,提出了基于定子电流误差的磁场定向矫正方法,通过分析磁场定向的超前和滞后时dq轴给定电流和反馈电流的关系,补偿到q轴电流,进而改变转差来弥补磁场定向不准带来的误差。最后,搭建了异步电机Matlab仿真模型和实验平台,结果表明,磁场定向在稳态运行和电机参数变化时有良好的矫正效果,保证控制系统的静、动态性能。
间接定子磁场定向 去磁分量 定子电流误差 磁场定向矫正
0 引言
笼型异步电机转子坚固可靠、成本低、应用面广。异步电机高性能变频调速控制方式主要有矢量控制和直接转矩控制。其中矢量控制方法具有调速范围宽、响应迅速、稳定性更好的优点,在工业生产、车辆交通和航空航天等领域均有广泛应用。目前异步电机的矢量控制大多采用以转子磁场定向,理论上通过转子磁链定向可以实现dq电流的完全解耦,从而独立控制磁链和转矩,使控制获得高动静态性能。然而要实现dq电流的完全解耦,需满足磁场定向的准确性,必须对磁链进行精确地检测[1]。目前研究人员已提出多种磁链检测方法[2-7],其中电压模型不受转子参数的影响,但在低速时由于电机电阻上的压降影响变大以及积分器的漂移等因素会使磁链观测出现偏差,从而使系统的控制性能降低,还可能引起系统的低频振荡。电流模型在低速时有良好的效果,但依赖于转子参数的准确性,因温度、饱和等因素造成的转子参数的变化会对转子磁链估计产生较大误差[8]。全阶观测器计算原理复杂,也不适合实际应用[9,10]。同时采用SVPWM调制方式计算参考电压矢量时,通过dq电流计算dq控制电压会引入励磁电流和转矩电流的交叉耦合项,也需要在电压给定侧进行解耦[11]。采用开环的磁场定向方式,可以避免磁链估算,简化系统结构[12],但对电机参数的依赖性进一步加强,因而必须对电机参数进行实时辨识来确保定向的准确性[13]。
采用定子磁链定向方式的矢量控制,可以降低对转子参数的依赖性[14]。但这种控制策略随着转矩的上升,q轴电流对磁链的去磁作用也随之增大,没有实现dq电流的完全解耦。为此,本文在文献[13]的基础上,通过改变d轴电流间接控制磁链恒定。根据负载的大小实时计算出q轴转矩电流对磁场的去磁分量,从而给出d轴励磁电流,保证定子磁链恒定。为了避免直接磁场定向中磁链计算的复杂性和不精确性,本文采用磁链开环的间接定向方式,没有进行磁链计算,不会把磁链估算误差引入到闭环控制中。但需保证磁链定向的准确性,因而提出基于定子q轴电流矫正的异步电机间接磁场定向控制。该方法通过比较定子电流的给定值与反馈值的误差,反馈q轴定子电流的给定,通过改变转差,实现磁链开环控制的定向矫正,保证系统的控制性能。最后利用Matlab搭建仿真模型并给出仿真结果,并运用一台5.5 kW异步电机实验样机进行了实验验证。
1 异步电机定子磁场定向
异步电机通过坐标变换,在dq坐标系下的数学模型为
(1)

定子磁场定向控制是将定子磁场正向幅值定义为d轴方向,此时ψsd=ψs,ψsq=0,代入式(1)的第3行,在稳态情况下可得
(2)
式(2)表明,定子磁链ψs不仅由isd单独产生,当负载转矩T≠0时,isq会削弱定子磁链。因此q轴电流对定子磁链存在一定去磁效应[14],这就是定子磁场定向和转子磁场定向的不同之处。

(3)
将转差表达式(3)带入磁链表达式(2),得到isd的表达式
(4)
式中,ψs为实际定子磁链。
为了保持磁链恒定,根据式(4)等号右边第二项即可定量得到isd补偿isq对定子磁链去磁效应的数值,实现定子dq电流的基本解耦。由于式(4)存在电机参数Ls和σ,因而这种解耦控制方法的性能受到电机参数的影响。
根据式(4)可得到定子dq电流矢量关系如图1所示。在电机运行过程中,当isq变化时,只需保证isd满足式(4),即可保证定子磁链的基本恒定,实现定子磁场定向控制。

图1 定子dq电流矢量关系Fig.1 The dq stator current vector diagram
2 基于定子电流误差的磁场矫正
上文提出的控制方法都是基于定子磁链准确定向的情况下得到的,而定向的准确性将会直接影响电机的控制性能。由于该方法采用的是磁链开环控制方式,而磁链定向的准确性将会随电机参数变化而变化,因此必须对定子磁链定向角θ作矫正,保证定子磁场定向的准确性,提高系统控制的性能。因而本文提出基于定子电流误差的磁场矫正方法。
根据上文的分析可知:ωs和isd可根据isq计算得到,因此只需控制isq即可控制系统性能。这种控制方式简化了控制过程,但电机参数的变化会影响定向的准确性,使控制性能降低。为此,需要分析在定向不准情况下的电流矢量。图2为定向角处于超前或滞后状态下的电流矢量。

图2 不同定子磁场定向情况下的电流矢量Fig.2 The current vector diagram of different stator flux orientation
从图2中可以看出,当磁场定向角超前真实磁链θ1时,有
(5)
定子d轴电流的isd大于实际量,电机处于过励磁状态,导致电机端电压、电流上升,电机发热增加。而定子q轴电流isq小于给定量,电机的输出转矩和功率下降,电机效率下降[15]。
相反,当磁场定向角滞后真实磁链θ2时,有
(6)
此时定子d轴电流的isd小于实际量,电机处于欠励磁状态,使电机反电动势变小,输入电流过大,而isd小于给定量在带同样的负载时,转矩分量增加很快,带载能力降低,输出转矩、功率相应降低,电机效率下降[15]。
综合以上两者分析,当电机参数变化引起磁链定向角偏离真实值时,都会使电机功率和效率降低,为此必须对磁场定向角进行矫正以保证定子磁场定向的准确性。
由以上分析可知,当定向角处于超前和滞后状态下,定子dq轴电流与正常情况下有所不同,且根据坐标变换后定子dq轴电流易于获得和测量,为此可以通过比较定子电流来判断定子磁场定向的准确性,调节系统的基本控制量isq,从而调节定子磁场的定向角,保证定子磁场定向的准确性。因此本文提出一种基于定子q轴电流误差的磁场定向矫正方法。
当定子磁链偏离真实磁链Δθ时,通过对q轴电流的调节使偏离角Δθ的稳态值趋于0。
以定向角超前Δθ为例,给出此时的电流矢量如图3所示。

图3 定向超前的定子电流矢量Fig.3 The stator current vector diagram of directional ahead
根据图3计算tanΔθ=tan(θ*-θ),定向误差角Δθ为
(7)
令
(8)
当定子磁场定向准确时,有R=0,即tanΔθ=0。
当电机参数变化以及系统受外界扰动(如电机电阻和电感变化)时,假设转子电阻阻值变大。根据式(3)可知,如果仍用原来的Rr会使计算得到的转差比实际值偏小。定向角为
θ=∫(ωr+ωs)dt
(9)
因此磁场定向角会滞后实际值,使真实q轴电流偏小,则R<0。为了让式(3)算出的转差和实际转差相等,需要加大isq的给定值,因此q轴电流给定的调节量为ifk>0。则
(10)
因此,转子电阻变大时,R<0,调节量ifk>0。转子电阻变小时,R>0,调节量ifk<0。所以可将0与R的比值经过PI调节器调节,输出量即为ifk,只要定向角超前真实磁链,经式(8)算得R>0成立,经过PI调节器调节后输出量ifk继续增加,从而使计算得到的转差和实际转差相等,磁链定向角等于真实磁链,即定向偏离角Δθ=0°。同理当定向超前时,使ifk<0,最终使Δθ=0°。从而在电机参数变换时,其磁链定向角始终保持在真实位置。
综合以上分析给出基于定子q轴电流的矫正异步电机间接定子磁场定向控制如图4所示。主要的控制部分包括dq轴励磁电流给定的计算、转差频率的计算、坐标变换和SVPWM调制。

图4 异步电机低速间接定子磁场定向控制框图Fig.4 The block diagram of indirect stator flux oriented control for induction motor at low speed
3 控制系统实现方案
为了对所提出的控制策略在异步电机低速运行时的性能进行验证,分别在Matlab/Simulink中进行仿真验证以及在实验平台上进行实验验证。电机参数见表1。
表1 异步电机参数
Tab.1 The parameters of induction motor
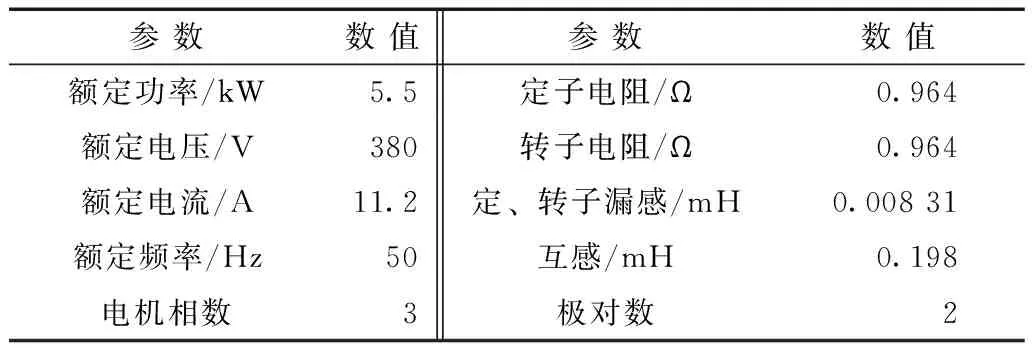
参数数值参数数值额定功率/kW5.5定子电阻/Ω0.964额定电压/V380转子电阻/Ω0.964额定电流/A11.2定、转子漏感/mH0.00831额定频率/Hz50互感/mH0.198电机相数3极对数2
3.1 仿真验证


图5 系统仿真波形Fig.5 System simulation waveform
图6为电阻突变时采用定向角矫正间接定子磁场定向控制和传统直接定子磁场定向控制误差角对比。由图可看出,采用定向角矫正间接定子磁场定向控制在转子电阻变化时,通过引入反馈量ifk,使得定向角(磁链真实值-定向值)基本消除,而采用传统的定子磁场定向控制,其在电阻变化时定向有偏差,且无法消除。

图6 电阻变化后定向角误差对比Fig.6 Orientation angle error when the resistance change

图7 传统定子磁场定向控制定向角误差Fig.7 Orientation angle error of traditional stator field-oriented control when the motor parameters change

图8 电机参数变化时基于定子电流误差矫正的定向角误差Fig.8 Orientation angle error of stator current correction when the motor parameters change
为进一步说明该方法的普遍适用性,图7为其他电机参数变化时,采用传统定子磁场控制方式的定向角度偏差拟合曲线。图8为其他电机参数变化时,采用基于定子电流矫正控制方式的定向角度偏差拟合曲线。对比图7和图8可知:采用基于定子电流矫正控制方式的定向角误差较小。实际过程中由于定子dq轴电流必在一定范围内振荡,因而反馈电流ifk也在一定范围内振荡,因此这种方法无法完全消除定向角误差,但这种基于定子电流误差矫正的方法对定向角误差有很好的改进。
3.2 实验验证
在实验平台上对提出的控制策略进行实验验证。实验平台由三相异步电机、转速转矩传感器、三相逆变器及其控制系统组成,负载是一台由逆变器控制的同步电机。控制系统采用Freescale的56F8346的DSP。实验平台如图9所示。

图9 实验平台Fig.9 Experimental platform


图10 突加减负载解耦控制实验波形Fig.10 The experimental waveforms when loading and unloading
图10为定子磁场解耦控制时,突加减负载时A相电流、电磁转矩、转速和磁链特性曲线。空载起动,转速为60 r/min,在4 s时突加25 N·m的负载,8 s时突减负载至0。在4 s和8 s瞬间,定子电流和输出转矩迅速相应负载变化,维持电机转速恒定。电机转速在突加和突减负载瞬间有变化,随即恢复稳定值,响应较快。定子磁链在整个过程中基本保持恒定。稳态时,电磁转矩、转速和磁链脉动较小,说明这种解耦控制方式具有较好的动态性能。
图11为采用基于定子电流矫正间接定子磁场定向矢量控制系统和传统定子磁场定向控制系统异步电机在低速时转子电阻突变时相关实验波形。转速为60 r/min,负载转矩为12 N·m。


图11 转子电阻突变为2倍时系统的实验波形Fig.11 The experimental waveforms when rotor resistance mutation is 2 times
图11a、图11b为定子q轴电流和磁链对比实验波形。在2 s时,转子电阻突变为2倍时,采用传统定子磁场定向控制方法,由于此时磁场定向角滞后真实磁场,其定子q轴电流偏大,为了维持系统稳定,其定子q轴电流会减小,定子磁场增大,输出转矩维持15 N·m,此时电机处于过励磁状态,三相电流幅值略微增加,电机效率降低。采用基于定子电流矫正间接定子磁场定向矢量控制系统,其通过定子电流矫正并经过PI调节后,引入反馈量ifk,使得定向角误差基本消除,因而实际电流和给定电流误差为零,使dq轴电流基本不变,定子磁链也不会改变。图11c为转速对比波形,采用传统方法在电阻突变时其转速稳态误差加大,而采用本文提出的方法其转速基本没有变化。图11d为电磁转矩对比波形,采用本文提出的方法在电机转子电阻突变后,电磁转矩脉动小于传统方法。该实验证明基于定子电流的矫正方法有较好的效果。
4 结论
本文针对间接定子磁链定向控制中定子dq电流不解耦的问题,提出一种保持定子磁链恒定的矢量控制方案。由于采用磁链开环的控制方式,在磁场定向过程中易受电机参数变化和环境的影响,提出了基于定子电流矫正的定子磁场定向控制,通过定子dq电流误差闭环进行磁场定向矫正。由于在矫正过程中仅使用定子电流值且没有引入其他任何电机参数,因而这种矫正方法简单、可靠且易实现。仿真和实验结果表明,在电机参数发生变化时,通过磁场矫正使定向角趋近真实值,保持磁链恒定。因此该控制方法具有良好的动静态性能。
[1] 周扬忠,毛洁.基于有效磁链概念的永磁同步电动机新型定子磁链滑模观测器[J].中国电机工程学报,2013,33(12):152-158. Zhou Yangzhong,Mao Jie.A novel sliding mode stator flux linkage estimator based on active flux principle for permanent magnet synchronous motors[J].Proceedings of the CSEE,2013,33(12):152-158.
[2] Bose B K.Modern power electronics and AC drives[M].New Jersey,USA:Prentice-Hall,2002:363-368.
[3] 冯晓刚,陈伯时,夏承光.感应电动机转子磁链的间接观测方法[J].电工技术学报,1997,12(1):15-18. Feng Xiaogang,Chen Boshi,Xia Chengguang.Flux observers for induction motors-A survey[J].Transactions of China Electrotechnical Society,1997,12(1):15-18.
[4] Hu J,Wu B.New integration algorithms for estimating motor flux over a wide speed range[J].IEEE Transactions on Power Electronics,1998,13(5):969-977.
[5] 何志明,廖勇,向大为.定子磁链观测器低通滤波器的改进[J].中国电机工程学报,2008,28(18):61-65. He Zhiming,Liao Yong,Xiang Dawei.Improvement of low-pass filter algorithm for stator flux estimator[J].Proceedings of the CSEE,2008,28(18):61-65.
[6] 陈增禄,马鑫,姬弘扬,等.定子磁链电压模型的偏移计算和反馈补偿新方法[J].中国电机工程学报,2014,34(18):3035-3041. Chen Zenglu,Ma Xin,Ji Hongyang,et al.A novel drift-estimated and feedback-corrective algorithm for voltage model of stator flux[J].Proceedings of the CSEE,2014,34(18):3035-3041.
[7] Comanescu M,Xu Longya.An improved flux observer based on PLL frequency estimator for sensor less vector control of induction motors[J].IEEE Transactions on Industrial Electronics,2006,53(1):50-56.
[8] Mastorocostas C,Kioskeridis I,Margaris N.Thermal and slip effects on rotor time constant vector controlled induction motor drives[J].IEEE Transactions on Power Electronics,2006,21(2):495-504.
[9] Alonge F,D’lppolito F,Giardina G.Design and low-cost implementation of an optimally robust reduced-order rotor flux observer for induction motor control[J].IEEE Transactions on Industrial Electronics,2007,54(6):3205-3216.
[10]Vicente I,Endemano A,Garin X.Adaptive full order observer based stable speed sensor less scheme for vector controlled induction motor drives[C]//13th European Conference on Power Electronics and Applications,Barcelona,Spain,2009:1-10.
[11]周志刚.异步电动机转子磁场定向偏差解耦控制系统的研究[J].电工技术学报,2003,18(3):19-23. Zhou Zhigang.Study on system of rotor field-oriented deviation decouple control for asynchronous motor[J].Transactions of China Electrotechnical Society,2003,18(3):19-23.
[12]Masiala M.Self-tuned indirect field oriented controlled IM drive[D].Canada:University of Alberta,2010.
[13]Krishnan R,Bharadwaj A S.A review of parameter sensitivity and adaptation in indirect vector controlled induction motor drive systems[J].IEEE Transactions on Power Electronics,1991,6(4):695-703.
[14]阮毅,张晓华,徐静,等.感应电动机按定子磁场定向控制[J].电工技术学报,2003,18(2):1-4. Ruan Yi,Zhang Xiaohua,Xu Jin,et al.Stator flux oriented control of induction motors[J].Transactions of China Electrotechnical Society,2003,18(2):1-4.
[15]陆海峰,瞿文龙,张磊,等.一种基于无功功率的异步电机矢量控制转子磁场准确定向方法[J].中国电机工程学报,2005,25(16):116-120. Lu Haifeng,Qu Wenlong,Zhang Lei,et al.A novel rotor flux oriented scheme of induction motor based on reactive power[J].Proceedings of the CSEE,2005,25(16):116-120.
Indirect Stator Field-Oriented Control for Induction Motor Based on the Stator Current Correction
Shao Jiajun Huang Wenxin Yang Jufeng Yang Lu
(College of Automation Engineering Nanjing University of Aeronautics and Astronautics Nanjing 210016 China)
In this paper,a new method of indirect stator field-oriented control for induction motor based on the stator current correction is proposed.The dq axis stator current and the stator flux linkage are analyzed.The relationship between q axis current and demagnetization component of stator flux linkage is calculated,and the decomposition of dq axis stator current is achieved.Using the indirect field-oriented vector control,the complexity and inaccuracy of the flux linkage observation in traditional field-oriented vector control at low speed are avoided.In order to guarantee the accuracy of the flux linkage orientation,the flux linkage orientation based on the correction of stator current error is proposed in this paper.Through the analysis of flux linkage,the dq axis dvanced current and delayed current,compensates to q axis current,and changes the slip to compensate to the error of the flux linkage orientation.Finally,the asynchronous motor of Matlab simulation model and experimental platform is established.And the results show that the system has great correction effects on the steady state operation and the variation of the motor parameters to ensure accurate static and dynamic performance.
Indirect stator field-oriented,demagnetization component,stator current error,field orientation correction
2015-07-01 改稿日期2015-08-27
TM343
邵佳俊 男,1991年生,硕士研究生,研究方向为电机及其控制。
E-mail:jsnthmsjj@sina.com(通信作者)
黄文新 男,1966年生,教授,博士生导师,研究方向为电机及其控制、新型风力发电技术、电能变换。
E-mail:Huangwx@nuaa.edu.cu
猜你喜欢
电机与控制应用(2022年1期)2022-09-01
电机与控制应用(2022年4期)2022-06-27
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
电测与仪表(2016年10期)2016-04-12
电测与仪表(2016年7期)2016-04-12
