基于CAN总线的电动客车电控系统多机通信模型设计
2017-01-05 00:49盛姣
黑龙江科学 2016年22期
盛 姣
(江苏联合职业技术学院无锡交通分院,江苏 无锡 214151)
基于CAN总线的电动客车电控系统多机通信模型设计
盛 姣
(江苏联合职业技术学院无锡交通分院,江苏 无锡 214151)
本文通过对基于飞思卡尔CAN总线模块的多机通信性能测试,选定了相关端口,并设计了通信测试电路板,加工PCB,完成了多机之间CAN总线通信性能的测试,为电控系统具体各单元的电路设计及布线打下良好基础。
CAN总线;多机通信;PCB
一台基本的电动汽车(Electric Vehicle)控制系统主要包括整车控制单元、电机控制单元、电源管理系统、仪表灯光系统、加速/制动踏板以及若干传感器等,而这些控制单元之间都是通过CAN总线来进行数据交换和控制信号传输的。为了确保后续设计的正常进行,设计一个基于CAN总线的多机通信模型非常有必要,此模型可以验证基于CAN总线的多机通信的可行性以及其通信速率。
1 多机通信测试原理图
在多机通信测试中,使用两个或两个以上的电子控制单元最简模型连接到CAN总线上,分别进行多机通信并设计同时发送数据帧以测试通信优先级。电子控制单元最简模型包括: S12xs128微控制单元及外围电路,USB-BDM(背景调试模块),CAN总线收发器,蓝牙无线串口模块等。电路原理图如图1所示。
在图1中,由于使用了蓝牙无线串口模块,所有的测试操作均通过超级终端(Hyper Terminal)虚拟通用串口对电子控制单元进行操作以及获取从电子控制单元返回的数据。蓝牙无线串口模块的型号为HC-05,该模块支持透明串口通信,波特率范围从2400bps~115200bps,可以通过AT指令进行修改。在本设计中,使用115200bps波特率进行通信。使用超级终端与电子控制单元进行交互,一定程度上可以替代传统的操作按键和液晶屏或数码管组成的操作面板,由于使用了上位机软件来代替硬件,可以加速开发时间并节省开发成本,还可以将测试数据轻松的保存于上位机,有利于后期分析与研究。
CAN总线收发器的型号有许多种,飞思卡尔公司的MC33897、MC33902分别为低速与高速CAN总线收发器芯片,飞利浦公司和英特尔公司也有很多CAN总线收发芯片。在本设计中,选择了飞利浦公司生产的PCA82C250芯片,该芯片完全支持ISO11898标准,支持高达1Mbps的通信,最多支持110个通信节点,完全可以满足本设计的通信要求。
2 PCB设计以及节点布线
在实际PCB设计中,为了实现快速开发并且使得微控制单元可以在其他实验项目中重复利用,于是先设计了S12xs128最小系统板。该最小系统板使用S12xs128MAA,共80个引脚,为四边贴片式(QFP)封装,将60个常用引脚引出,并可以通过间距2.54mm接插件嵌入到其他系统中。根据飞思卡尔官方S12XS芯片数据手册,设计如图2的PCB图。
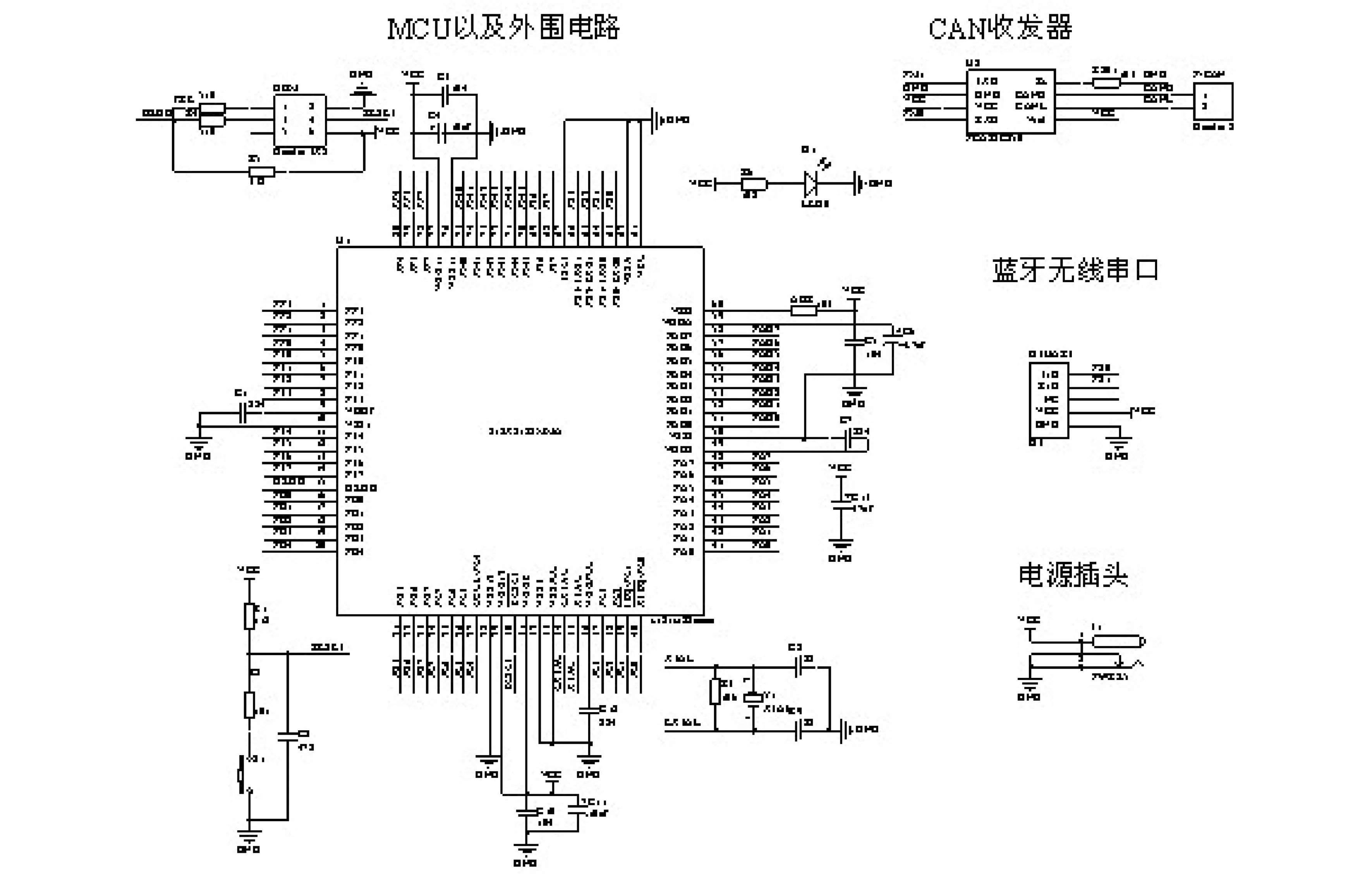
图1 电子控制单元CAN总线通信最简模型原理图Fig.1 Electronic control unit CAN bus communication of the simplest model diagram
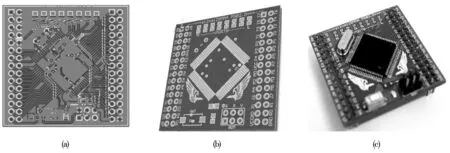
图2 S12xs128最小系统板 a)为2D视图 b)为3D视图 c)为视图实物Fig.2 S12xs128 minimum system board a)2D view b)3D view c)the object of the view
基于该最小系统板设计电子控制单元CAN总线通信最简模型时,只需要将微控制单元部分设计成间隔为2.54mm的标准接插件,待最简模型PCB板制作完成后,将微控制单元最小核心板插入最简模型PCB板,即可完成设计。由于除去微控制单元的CAN总线通信最简模型元件较少,布线简单,所以可以在实验室内完成形状切割以及PCB覆铜板腐蚀。图3为最简通信模型PCB图。
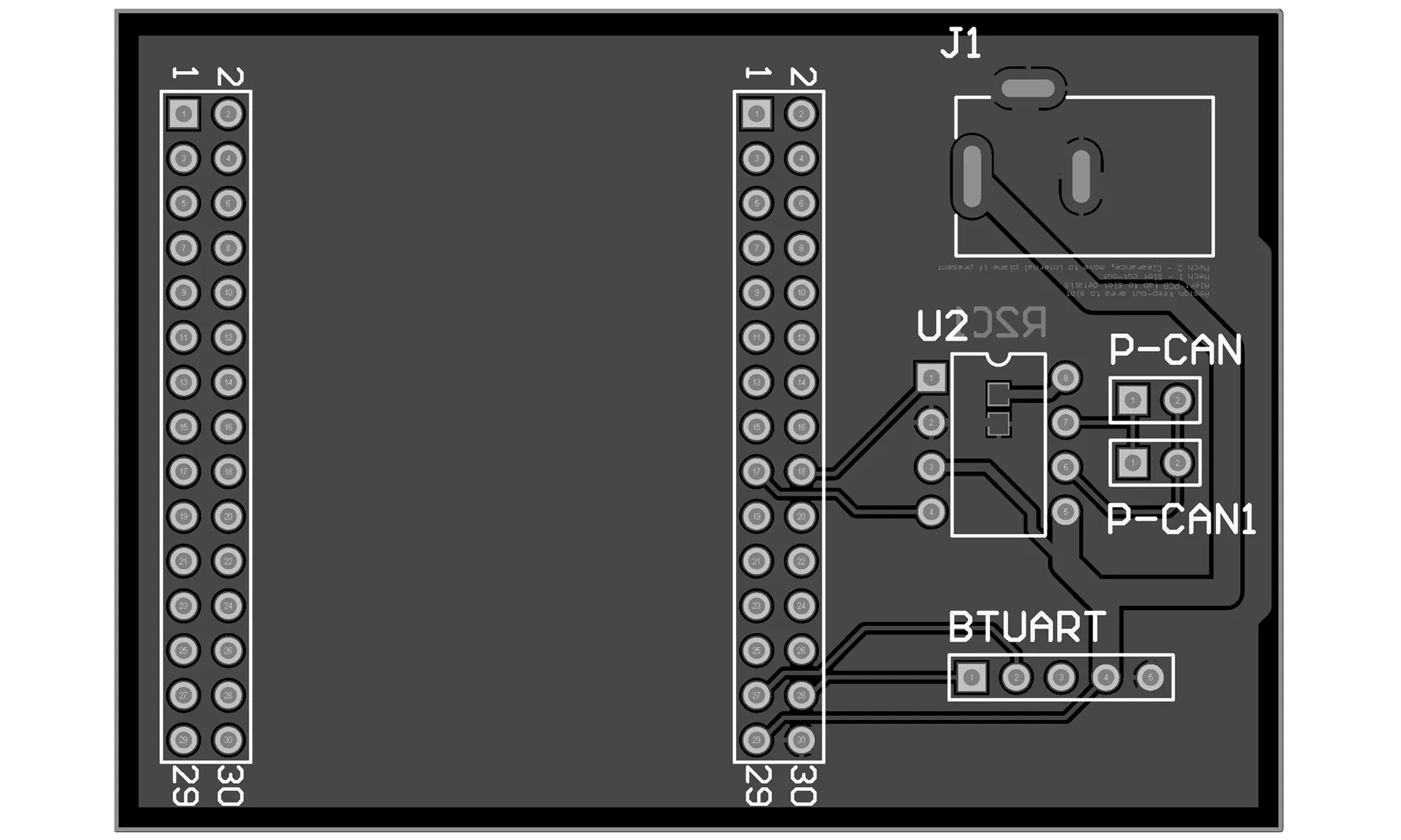
图3 最简通信模型PCB图Fig.3 The simplest communication model of PCB graph
为了解决多个电子控制单元通信节点的电缆连接问题,特意在每一个电子控制单元最简模型中设置两个CAN接口,如图3所示,红色虚线框内,两个接口完全一样。如果该节点为中间节点,则两个接口分别连接左右节点,如该节点为最终节点,则一个接口接入CAN总线,另一个接口接124Ω的电阻。连接方法如图4所示:

图4 各电子控制单元连接示意图Fig.4 The electronic control unit connection diagram
由于S12xs128最小系统板数量有限,在本测试中,首先使用两节点多机通信测试CAN总线通信性能。
3 多机通信测试方法
在多机测试中,主要验证如下内容:一是验证两节点之间的相互通信;二是利用微控制单元定时器对于一次以及多次点对点收发记时,在多帧通信时检测是否有错误帧。具体方法如下:
首先,搭建如图3的基本验证电路,确保连接正确。然后,编写测试程序,设置节点1的源地址为0x02,节点2的源地址为0x03。从节点1发送8byte数据,当节点2接收到数据后,将收到的数据转发给节点1,节点1再通过蓝牙UART模块将收到的数据发送到上位机超级终端,同时,将一次收发所用的时间发送到上位机。
在实际测试中,首先使用TDS1012B-SC数字示波器测量节点1的TX端信号,CAN总线的CAN_H,CAN_L信号,波形图如图5。图a)为节点1的波形图,图b)与图c)中上方波形是CAN_H的信号,下方波形是CAN_L的信号,图b)为信号周期开始部分放大波形,图c)为一个信号周期的波形。

图5 通信电路波形图Fig.5 Communication circuit waveform graph
然后利用超级终端发送“send”指令,即可收到发送成功信息,并返回通信用时,本次测试用时0.84ms,如图6所示。
经过测试可知,基于飞思卡尔S12xs128微控制器的CAN总线通信是可行的,并且通信时间基本满足波特率250kbps的设定。由于S12xs128微控制器与S12系列所有微控制器均采用同一种CAN总线控制器,因此验证了S12xs128微控制器,可认为其他同系列微控制器的CAN总线控制器可以满足使用要求。
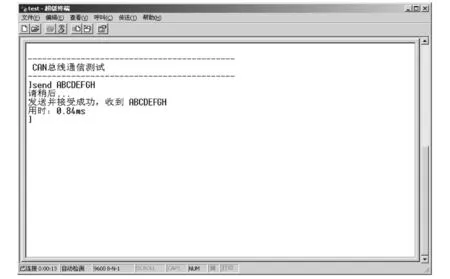
图6 超级终端中测试界面Fig.6 The testing interface of hyper terminal
4 结语
本文对电动客车控制系统进行了多机通信模型设计,进行了基于飞思卡尔CAN总线模块的多机通信性能测试,并通过验证完成了相关端口的选定,设计通信测试电路板并加工PCB,测试多机之间的CAN总线通信性能。未来还将对具体控制单元,包括整车控制单元、电池组管理控制单元、加速/制动踏板位置传感器单元、仪表显示控制单元、照明/信号控制单元和车门控制单元等单元进行电路设计,整车CAN总线布线设计与相关程序设计。
[1] 张国强,林永峰.智能电表检测系统通信协议栈设计与实现 [J].现代电子技术,2016,39(11):34-37.
[2] 李芳,张俊智.电动汽车动力总成系统控制器局域网总线通信协议[J].机械工程学报,2008,44(5):45-47.
[3] 黄智.电动汽车控制器的设计与实现[D].成都:电子科技大学,2007.
[4] 王建华.电气工程师手册[K].北京:机械工业出版社,2006.
[5] 常加旻.混合动力电动汽车BMS 与充电机的CAN总线通信设计[J].工业控制计算机,2010,23(5):45-46.
Design of multi-computer communication model for electric control system of electric bus based on CAN bus
SHENG Jiao
(Wuxi Branch of Transportation, Jiangsu Union Technical Institute, Wuxi 214151, China)
Based on the multi-computer communication performance test of Freescale CAN bus module, the relevant ports are selected, the communication test circuit board is designed, the PCB is processed and the CAN bus communication performance test is completed, which has laid a good foundation for circuit design and wiring of the specific units in electric control system.
CAN bus; Multi-computer communication; PCB
2016-10-12
盛姣(1981-),女,工程硕士,讲师。
U469.7
A
1674-8646(2016)22-0006-04
猜你喜欢
机械工业标准化与质量(2022年6期)2022-08-12
装备制造技术(2020年11期)2021-01-26
装备制造技术(2020年2期)2020-12-14
河南科技学院学报(自然科学版)(2020年2期)2020-05-22
电子制作(2018年11期)2018-08-04
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
职业技术(2015年8期)2016-01-05
中国卫生(2015年12期)2015-11-10
空间控制技术与应用(2015年2期)2015-06-05