无人机多传感器协同探测演示系统设计
2017-01-07 01:29刘宁波孙艳丽
兵器装备工程学报 2016年12期
刘宁波,孙艳丽,周 伟
(海军航空工程学院 a.信息融合所; b.基础实验部,山东 烟台 264001)
【信息科学与控制工程】
无人机多传感器协同探测演示系统设计
刘宁波a,孙艳丽b,周 伟a
(海军航空工程学院 a.信息融合所; b.基础实验部,山东 烟台 264001)
针对电子侦察设备、SAR和CCD相机单一传感器无法满足作战需求,提出了无人机多传感器协同探测思想。采用Matlab设计并实现无人机多传感器协同探测演示系统,完成无人机对目标查证、区域监视及目标搜索等任务模型的侦察模拟演示。运行结果直观形象地表明:根据不同任务模型和侦察传感器的特点灵活设置侦察方案,能有效提高无人机的侦察效能。
无人机;协同探测;多传感器;演示系统
常见的电子/光学类侦察载荷有电子侦察设备、SAR和CCD相机等[1-3]。电子侦察设备被动工作、隐蔽性强,且具有电子战能力,但其定位精度相对较低。SAR除具有与光学摄像相近的分辨率外,还具有成像不受气候和昼夜限制、能发现遮挡物之后的物体等优点,但数据处理和解译相对困难[4-5]。CCD相机可对目标即时可视侦察,但其受气候、光线等因素的影响较大,不能进行全天时、全天候侦察。多传感器协同可以很好地补充和改善各自的不足,综合利用各传感器的优势,使无人侦察机的整体作战效能大幅提升,有效地提升对战场的情报保障能力[6-7]。电子侦察设备与SAR的协同,利用电子侦察设备提供大致定位,SAR再进行精确侦察,主要用于对静态目标的侦察和精确定位。电子侦察设备与CCD相机的协同,主要用于对目标区域进行即时可视的侦察或拍摄目标图像发至指控端进一步采集数据。SAR和CCD相机之间的协同,主要用于对动目标的跟踪定位和探测成像。无人机电子侦察设备、SAR、CCD相机三者协同,主要是对目标的精确定位和观测成像,以及对目标的特征检测等[8-11]。本文提出了无人机多传感器同探测概念演示系统的设计,使无人机多传感器协同探测这一概念有直观的表述和印象。
1 演示系统功能设计
演示系统旨在用直观的界面系统阐述无人机多传感器协同探测技术的内涵,包含着相关知识解说、任务情景模拟、侦察方案选择、终端显控模拟、综合态势分析等内容。此演示系统基于Matlab软件环境,为二维仿真动画模拟,且假设无人机始终保持匀速平飞。
2 演示系统软件设计
演示系统程序的编写基于Matlab开发软件,为实现协同探测的概念模拟,在程序编写时提前设定无人机及其侦察载荷、飞行航路、待侦察目标等的相关数据,构建任务环境,以更好地表现协同探测的概念及其技术方案。
2.1 系统界面
合理的系统界面设计可以较好地进行人机交互,有助于系统预设功能的实现。无人机多传感器协同探测演示系统界面的设计遵循其构建目的及意义,以其预设功能为指导进行模块布置,合理采用多界面显示方式,以较好地演绎系统功能。系统主运行界面设计如图1所示。

图1 演示系统主运行界面
合理规划系统功能模块,优化模拟演示窗口的位置、大小及各自的功能键、文本框、面板等控件的布局,力求简洁、大方、实用;创建控件并设置各控件的属性;设计菜单,增添“系统简介”、“基础理论”、“情景设定”、“效果示例”等菜单选项,完善GUI界面功能;编写回调函数,将预设的系统功能编写为Matlab程序,通过函数回调较好的嵌入主程序里,实现程序的正常运行。运用“figure”函数调用其他界面,完善系统功能。
2.2 辅助菜单
菜单栏增设“系统简介”、“基础理论”、“情景设定”、“效果示例”等选项,其中“系统简介”选项下设“简介”、“运行环境”下拉菜单,为使用者进行本系统整体功能的简要介绍;“基础理论”选项下设“无人机”及“侦察载荷”两个选项卡,分别下设“国内”、“国外”及“电子侦察”、“SAR”、“CCD相机”等下拉菜单,此辅助菜单的设置为了实现对无人侦察机功能、分类、经典机型的介绍和对电子侦察、SAR、CCD相机等侦察载荷相关知识的学习;“情景设定”选项下设“目标查证”、“目标搜索”及“区域监控”选项,向使用者介绍3种不同任务情景下的侦察方案选择;“效果示例”选项,分别就电子侦察、SAR及CCD相机对目标信息的读取做出演示。
2.3 操作窗口
在主程序的操作演示窗中,设置“侦察模式”选项卡,通过点击其上的“目标查证”、“目标搜索”及“区域监视”选项分别完成3种任务情景的完整演示。在“态势分析”模块中同步显示显控窗口所获取的情报信息。3种侦察传感器所捕获信息的态势分析中,电子侦察情报分析内容有辐射源目标的方位、距离、性能参数等,完成对目标基本信息的初步判别及态势判读;SAR侦察情报分析内容包括对分辨率较高的目标SAR图像的基本判读及目标的定位与跟踪等,并进行态势分析;CCD相机侦察情报分析内容包括对分辨率高的彩色目标图像的判读等,实现对目标的即时可视侦察与态势分析。
2.4 模拟情景演示窗口
在主程序的模拟情景演示窗口中,以绿色3角形代表无人机,浅蓝色折线代表无人机航路,蓝色点状或五角星代表舰船等地物,红色点状或三角形代表待侦察目标,蓝色的大圆为电子侦察设备的作用范围,绿色及红色扇形分别代表SAR及 CCD相机的侦察区域(同时以扇形半径的大或小区分)。设定任务区域为北纬37°~39°,东经121°~123°的平面海域,无人机完成不同任务情景下对海面目标的侦察监视。
1) 无人机参数设定。对无人机性能参数的设定参考国产“翔龙”高空长航无人侦察机。在演示系统中假定无人机始终在3 000 m高度保持匀速平飞。
2) 目标查证侦察任务模型。在此任务模型中,假设待侦察目标的坐标已通过其他的侦察途径得知并将数据告知无人机,无人机起飞进行目标查证。无人机起飞后在规划好的航路上飞行,电子侦察设备开机,对目标辐射源进行定位,为无人机提供实时的目标坐标,并根据无人机与目标的位置关系及侦察结果,依次对目标进行SAR及CCD相机的侦察,以进一步的获取目标信息,为指挥员决策提供参考。模拟侦察效果如图2所示。
3) 目标搜索侦察任务模型。在常规侦察任务模型中,设定有多个未知目标,包括渔船、我方舰船、敌方舰船等目标。由无人机通过侦察设备进行目标搜索、判别、跟踪及侦察。无人机以“z字形”航路巡航,电子侦察设备捕获目标并进行判别,根据目标威胁程度决定是否进一步侦察,无人机改变航路靠近待侦察目标,根据与目标的位置关系,进行SAR及CCD相机的协同侦察。模拟侦察效果如图3所示。
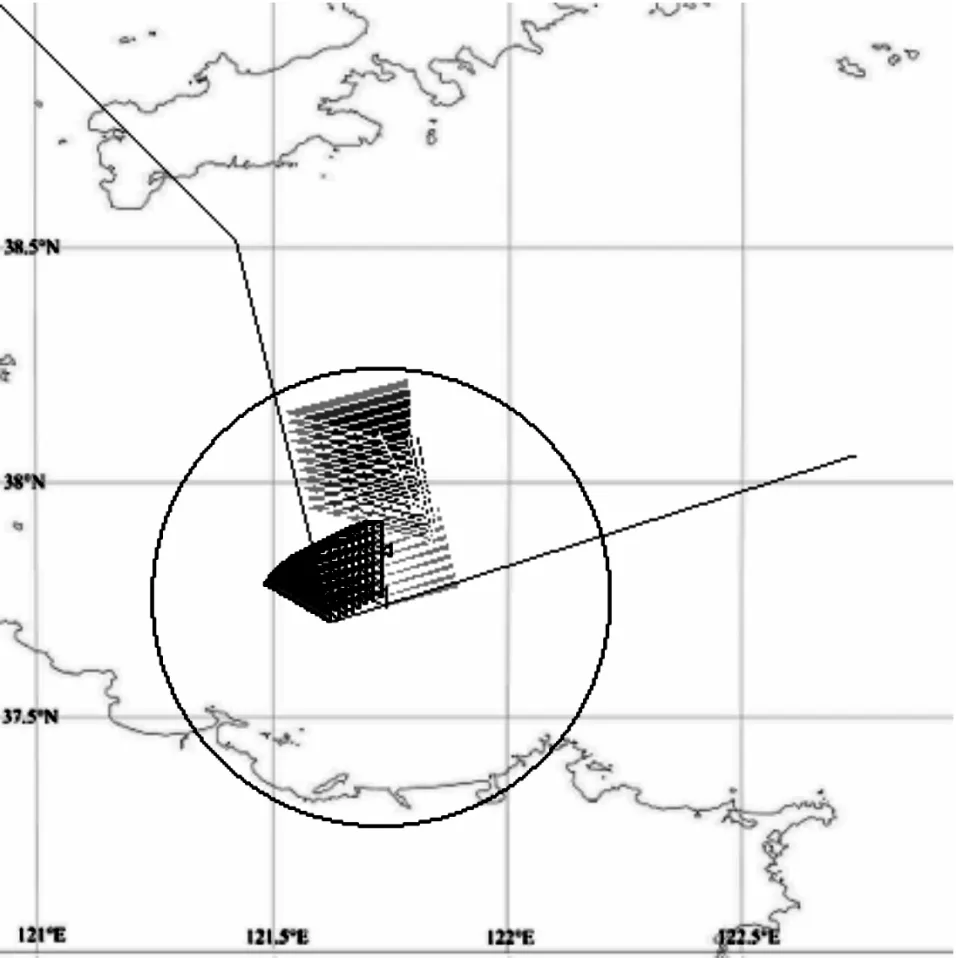
图2 目标查证模拟侦察演示图

图3 目标搜索模拟侦察演示图
4) 区域监视侦察任务模型。无人机在执行对固定目标区域(如岛屿、海域等)的侦察监视任务时,根据计划航路飞抵目标并环绕飞行,以电子侦察设备的侦测半径作为无人机区域巡航的半径,运用条带式SAR和聚束式SAR完成对目标区域的扫描及区域内重点目标的侦察判读,运用CCD相机的“锥扫”模式实现较好海况下目标区域的快视侦察。SAR及CCD相机综合协同,实现对目标情报的获取,完成区域监视任务。模拟侦察效果如图4所示。

图4 区域监视侦察模拟演示图
2.5 模拟显控演示窗口
模拟显控演示窗口完成对预设的无人机任务情景演示的同步显控演示。设定显控有两种视角,即全局视角和无人机视角,分别以目标轨迹和目标散点表示,应用在不同任务情景中。
在主程序的模拟显控演示窗口中,以黑色正方形框代表无人机侦察范围,蓝色“+”代表电子侦察设备捕获目标,绿色“□”代表SAR设备捕获目标,红色“○”代表CCD相机捕获目标,以目标“绿—红”点迹之间的变化代表目标是否为侦察传感器所捕获,设定标记不重合为三种侦察传感器存在定位误差。目标标记显示的text内容为无人机对多个目标的标号及三种传感器对目标侦察的结果(其中,电子侦察设备侦察结果显示内容为目标辐射源的频段、脉冲宽度、脉冲重复周期等主要特征参数,SAR侦察结果显示内容为目标的航速、主尺度等基本信息,CCD相机侦察结果显示内容目标的主尺度、类型、武备等详细信息)。显控模拟演示图如图5所示。
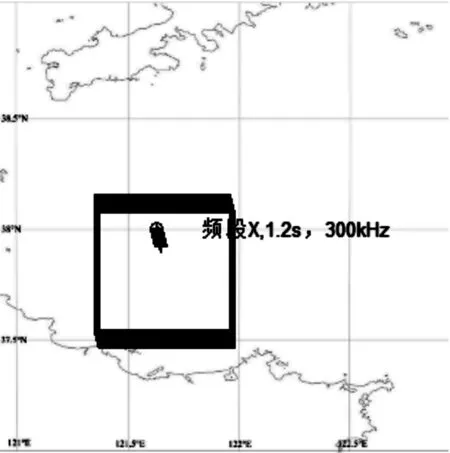
图5 显控模拟演示图
3 演示系统程序实现
根据演示系统预设功能、运行环境的设定以及主运行界面的设计等,画出演示系统Matlab程序编写的基本流程图,如图6。根据侦察方案的不同输入相关数据,构建目标运动场景,判断无人机平台与目标之间的距离,根据判断条件打开不同侦察载荷,并实现不同载荷时显控窗口的输出和情报分析结果的输出。
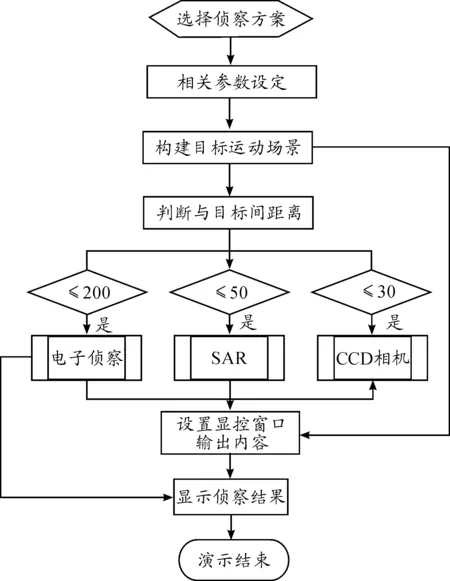
图6 演示系统流程
程序编写工作分步完成,首先,完成对模拟情景演示中不同侦察方案的情景设置与动画演示的程序编写;其次,实现不同侦察任务情景的模拟显控演示程序;再次,把对情报分析窗口与显控关联并同步显示;最后,进行主函数的编写,完善主运行界面菜单及各功能键的函数回调并实现演示系统时间同步,完成无人机多传感器协同探测演示系统。编写过程如图7所示。
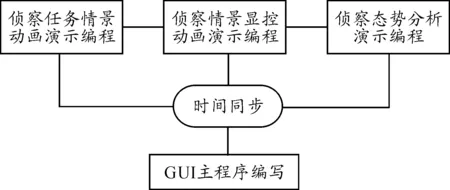
图7 程序编写工作步骤
4 小结
无人机多传感器协同探测演示系统的构建和运行对多传感器协同的概念进行了形象直观的阐释,通过演示系统的动画演示,可以直观形象地看到多传感器协同探测方案设计的大体思路。在复杂的战场环境条件下,仅使用某一机载传感器实施侦察监视任务往往很难满足情报需求。运用多传感器协同探测,根据不同任务模型和侦察传感器的特点灵活设置侦察方案,利用电子信号侦察设备远距离、宽领域的能力来提高侦察效率,把SAR作为侦察的主力完成目标探测,CCD相机则为两者做补充,可以很好的补充和改善各传感器的不足,综合利用各传感器的优势,实现对目标快速准确探测,达到无人机侦察效能的最大化。
[1] 尹航,李少洪.无人机多传感器集成与数据融合[J].现代防御技术,2004(2):47-50.
[2] 张旺.无人机电子/光学传感器协同侦察技术研究[D].南昌:南昌航空大学,2014.
[3] SHIMA T,RASMUSSEN S.无人机协同决策与控制——面临的挑战与时间应用[M].刘忠,彭鹏飞,译.北京:国防工业出版社,2012.
[4] 陈黎.军用无人机技术的发展现状及未来趋势[J].航空科学技术,2013(2):11-14.
[5] 全丽.机载多传感器数据融合目标跟踪技术研究和实现[D].成都:电子科技大学,2012.
[6] 赵国庆.雷达对抗原理[M].西安:西安电子科技大学出版社,2012:9-12.
[7] 毛红保,田松.无人机任务规划[M].北京:国防工业出版社,2015.
[8] 童玲,陈彦,贾明权.雷达遥感机理[M].北京:科学出版社,2014:19-23.
[9] 陈向宁.军用光学遥感[M].北京:国防工业出版社,2010:63-68.
[10]都基焱, 张振.小型无人机飞行控制系统硬件设计[J].兵工自动化,2014(9):64-67.
[11]张旺,申洋,陈伟.无人机多侦察载荷协同侦察效能评估[J].电光与控制,2014(3):21-25.
(责任编辑杨继森)
Dsign for Multi-Sensor Collaborative Reconnaissance of Unmanned Aerial Vehicle Demonstration System
LIU Ning-boa, SUN Yan-lib, ZHOU Weia
(a.Research Institute of Information Fusion; b.Department of Basic Experiment, Naval Aeronautical and Astronautical University, Yantai 264001, China)
For single sensor, such as Electronic reconnaissance equipment, SAR and CCD camera, was unable to meet the operational requirements, the multi-sensor collaborative detection of unmanned aerial vehicle (UAV) was proposed. Based on Matlab software, multi-sensor collaborative reconnaissance demonstration system was designed and realized; The reconnaissance simulation demonstration tasks of UAV such as target verification, regional surveillance and target acquisition were achieved. The run results intuitively demonstrated that if we setup reconnaissance application flexible according to the characteristics of the different task model and sensor, the multi-sensor collaborative reconnaissance would increase the reconnaissance efficiency of UAV effectively.
UAV; collaborative reconnaissance; multi-sensor; demo system
2016-07-11;
刘宁波(1983—),男,博士,讲师,主要从事信号处理研究。
10.11809/scbgxb2016.12.019
刘宁波,孙艳丽,周伟.无人机多传感器协同探测演示系统设计[J].兵器装备工程学报,2016(12):80-83.
format:LIU Ning-bo, SUN Yan-li, ZHOU Wei.Dsign for Multi-Sensor Collaborative Reconnaissance of Unmanned Aerial Vehicle Demonstration System[J].Journal of Ordnance Equipment Engineering,2016(12):80-83.
TP391
A
2096-2304(2016)12-0080-04
修回日期:2016-08-15
猜你喜欢
疯狂英语·初中天地(2022年2期)2022-07-07
北京航空航天大学学报(2022年6期)2022-07-02
新班主任(2022年4期)2022-04-27
纺织科学研究(2021年1期)2021-12-03
科学大众(2020年23期)2021-01-18
电子制作(2019年22期)2020-01-14
劳动保护(2019年3期)2019-05-16
汽车观察(2019年2期)2019-03-15
时代英语·高一(2019年1期)2019-03-13
电子制作(2018年9期)2018-08-04