
高阶多段变性椭圆斜齿轮封闭条件简化算法
2017-01-12 08:39刘晓刚刘天元黄诗
山东工业技术 2016年24期
刘晓刚+刘天元+黄诗

摘 要:鉴于外啮合高阶多段变性椭圆斜齿轮封闭条件包含大量积分运算,比较复杂,本文用数学方法进行简化运算,结果化成了简单的四则运算,提高了设计速度。
关键词:外齿轮;高阶多段变性椭圆;斜齿轮
DOI:10.16640/j.cnki.37-1222/t.2016.24.002
0 前言
非圆齿轮机构是一种瞬时传动比按一定规律变化的齿轮机构。根据齿廓啮合基本定律。理论上讲,对节线的形状并没有限制,常用的曲线有:椭圆、变性椭圆以及对数螺线等。非圆齿轮是一种可精确实现非匀速传动的部件,当前应用以椭圆族非圆齿轮居多。椭圆齿轮是最为广泛应用的椭圆族非圆齿轮;在椭圆齿轮基础上保持向径不变,将极角缩小整数倍,就可演变出高阶椭圆齿轮,实现周期性传动比;将2个阶数不同(且可以不是整数)的椭圆组成连续封闭的曲线,就可以形成变性椭圆齿轮[1,2]。众所周知,椭圆齿轮副及高阶椭圆齿轮副的传动比在一个周期内是对称的,但变性椭圆齿轮副的传动比不具有对称性。文献[1]综合高阶椭圆齿轮[3]及变性椭圆齿轮[4]优点,提出高阶变性椭圆齿轮(实质为高阶二段变性椭圆齿轮),其在旋转一周的过程中,传动比曲线有多个变化周期,且在每个周期内传动比曲线均不具有对称征。
1 高阶多段变性椭圆斜齿轮设计的相关公式及推导
根据非圆齿轮理论[1]可知,对于高阶多段变性椭圆斜齿轮,当主动轮的模数、齿数、螺旋角,及、、、确定后,为了使轮齿能在节曲线上均匀分布,节曲线周长必须满足条件: ;从动轮节曲线周长为: ,式中,为从动轮阶数。另外,非圆齿轮节曲线周长为
联立式以上式子,采用matlab的quadl(L, 0,π/2,tol)命令进行数值积分,即可确定主动轮长半轴。
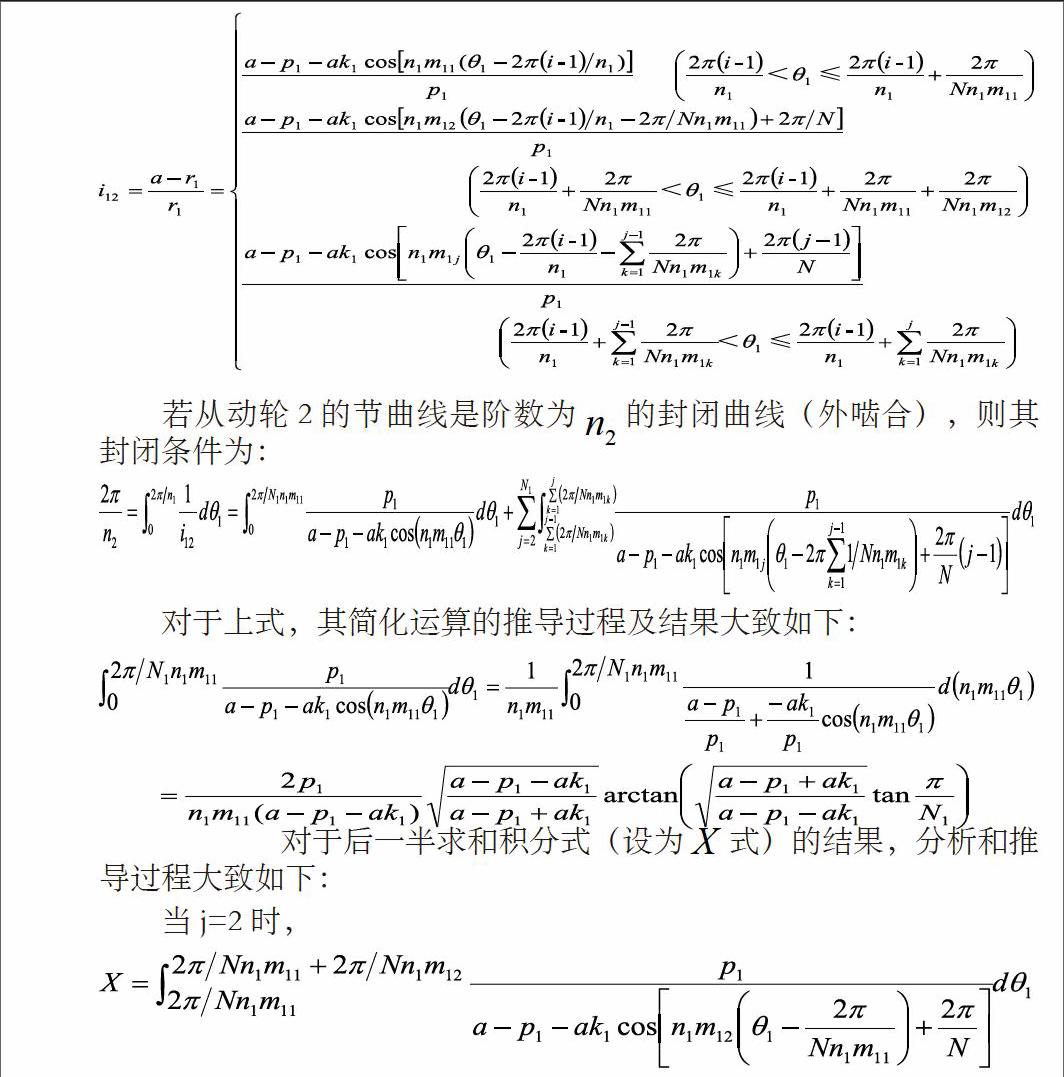
对主动轮1和从动轮2构成的非圆外啮合齿轮副,传动比为:
至此,已完全推导出了高阶多段变性椭圆斜齿轮封闭条件的简化算法。
2 结论
通过变积分运算为四则运算的方法大大降低了求解外啮合高阶多段变性椭圆斜齿轮封闭条件的难度,提高了外啮合高阶多段变性椭圆斜齿轮的设计效率。
参考文献:
[1]吴宗泽,罗圣国.机械设计课程设计手册[M].北京:高等教育出版社,1999.
[2]曾正明.机械工程材料手册:金属材料[M].北京:机械工业出版社,2003.
[3]刘生林,黄先祥,吴序堂.用三次样条进行非圆齿轮节曲线设计的研究[J].机械传动,1999,(5):20-21.
[4]刘永平,孟鹏飞.基于MATLAB的高阶椭圆齿轮副节曲线的设计[J].计算机应用技术,2010,37,(2):39-4
作者简介:刘晓刚(1964-),男,内蒙古包头人,博士,教授,硕士研究生导师,主要从事焊接机器人方面的科研和教学工作。
*为通讯作者
