基于差分图像的滴塑模具残留物检测算法
2017-01-16 01:14邓高生王世勇
计算机测量与控制 2016年12期
邓高生,李 迪,王世勇
(华南理工大学 机械与汽车工程学院,广州 510640)
基于差分图像的滴塑模具残留物检测算法
邓高生,李 迪,王世勇
(华南理工大学 机械与汽车工程学院,广州 510640)
模具是工业产品的成型工具,在滴塑加工过程中,若模具存在异物,它会导致下一次成型时成品出现孔洞,严重降低产品质量;针对该问题,提出了一种基于差分图像的残留检测算法,首先采用基于灰度模板匹配算法定位检测区域,再将标准图像和当前图像作差分,并进行阈值分割和形态学处理获得二值化图像,最后对图像进行连通区域分析,得到残留物在图像中的位置和大小;针对环境光照变化引起的误检现象,采用了一种全局光照补偿算法降低其影响;测试结果表明,该算法效率高并具有良好的稳定性,适用于模具的残留物检测。
滴塑;残留物检测;差分图像
0 引言
滴塑技术是利用高分子材料在一定温度下具有黏流性的特点,在它处于黏流状态时按照要求塑造成设计的形状,并在一定温度下固化成型[1]。用来完成各类颜色塑体的定型,在完成一次滴塑后,需要将塑料件从模具取出,此时有可能会出现部分塑料残留物在模具上,在进行下一次滴塑时塑料件会出现孔洞,影响成品率。因此每次滴塑开始前都应该检测是否有残留物。
残留物检测是机器视觉的重要应用场景,目前也有很多研究人员根据具体使用环境提出了各自的解决方法,其中,张果胜提出基于灰度和轮廓模板的异常检测算法[2],马琳采用了灰度共生矩阵实现了注塑模具的瑕疵检测[3],尹华则通过边缘特征图对模具的异物进行检测[4],虽然他们实现的算法具有较高鲁棒性,但算法过程比较复杂,速度较慢。
采用的检测算法基于差分图像,即模板图像和当前图像做差值并取绝对值。首先需要对图像进行平滑滤波以降低噪声对检测算法的影响。由于机器振动、电机丢步等问题,模具在图像中的位置会有少量位移,需要使用模板匹配算法修正目标区域的位置偏差。由于设备工作环境的光线会有小幅度变化,因此需要对图像亮度进行补偿。再求差分图像并使用阈值分割方法进行二值化,并对它进行形态学处理以消除孤立区域和连通区域中间的缝隙,最后使用连通区域算法进行面积测量。
1 算法过程
1.1 图像平滑
在图像处理系统中,采集的图像由于硬件的原因,往往有各类噪声,如敏感元器件的内部噪声热噪声、抖动噪声、量化噪声等,而这些噪声往往是随机产生的,分布往往不均匀,对后续的处理有一定影响,为了抑制这些噪声,改善成像质量,我们需要首先对采集的图像进行平滑去噪处理。
常用的滤波算法包括均值滤波、中值滤波、高斯滤波,基于运行效率和效果的考虑,本文采用高斯滤波实现图像平滑。
1.2 目标位置偏差修正
设备在运行一定时间后,由于丢步、干扰、机器振动等因素,会导致绝对定位出现误差,影响测量精度,因此需要对位置进行修正,获取正确的目标区域。
模板匹配算法是一种比较精确的定位算法,它通过在检测图像上找出与模板最相似的区域定位目标。常用的度量灰度图像相似度的算法有平方差、归一化平方差、相关、归一化相关系数等,其中归一化相关系数的抗白噪声能力强、精度较高,并具备一定的抗全局光照能力,因此本文采用该算法作为相似度度量方法,图像的归一化相关系数定义如下:
R(i,j)=
(1)
其中:Si,j表示检测图像在(i,j)处的子图像,T表示大小为M×N的模板图像。R(i,j)越接近1,表示相似程度越高。直接使用上式计算非常耗时,计算一次模板图像跟检测图像的子区域的相似度,需要进行2MN次乘法运算,因此有学者提出快速模板匹配算法[5],使用积分图、平方积分图加速相关系数降低计算量。
本文采用的相机分辨率是2 592×1 944,如图1,(a)是目标区域,大小为1 703×1 792;(b)是含有残留物的模具(圆圈部分是残留物),矩形是识别定位的结果。

图1 使用模板匹配算法匹配目标
1.3 光照补偿
拍摄图像时光源的属性,如它的颜色、亮度、照射角度等都会对图像产生一定程度的影响。有效地克服光照影响始终是图像处理中必不可少的环节,也是计算机视觉技术中尚未完全解决的技术难点之一[6]。图像的光照条件会对检测结果产生较大影响。对于本文设备,光照主要发生了全局变化,可以通过对图像的灰度直方图进行调整实现。
一般情况下,光照越强,图像灰度值的均值越大,亮度变化越大,即灰度值的方差越大,反之,光照越小,均值越小,亮度变化越小,方差越小。基于这个关系,可以使用均值和方差对实际采集的图像的灰度值进行线性变换,以达到补偿亮度目的,下式是变换的表达式:
(2)
下标T表示模板图像,下标S表示当前采集的图像。σ表示图像的方差,u是图像的均值。
1.4 图像差分
图像差分算法常常应用在目标跟踪、缺陷检测中,它的原理是通过将两幅图像相减并取绝对值,从而去除两幅图像间相同的区域,而只保留它们存在差异的地方。
本文使用彩色相机,将RGB3个通道的差分图像求绝对值后相加即可。
R=|SR-TR|+|SG-TG|+|SB-TB|
(3)
1.5 阈值分割
得到差分图像后,需要对图像进行二值化处理,以便进行连通区域计算。
OTSU算法[7]是一种常用的自动确定阈值的算法,又称为类间方差最大法,在1980由大津展之提出。它是基于判决分析最小二乘原理上推导得到,思想是采用某个灰度阈值,将图像分为两组,求这两组各自方差,并求它们差值。如图2,(b)是使用OSTU阈值分割得到的二值化图像,算法选取的最佳阈值是45,获取阈值耗时2.6 ms,二值化耗时1 ms,耗时较短,可以满足检测要求。

图2 使用OTSU算法二值化后的图像
1.6 形态学运算
由于光照和成像噪声,阈值分割后的图像存在许多小面积的颗粒状区域,有些较大的区域被分割成多个小区域,前者引入了伪缺陷,后者有可能导致检测失败,为了提高缺陷识别准确率,本文需要对阈值分割后的图像进行形态学运算。数学形态学[8]形成于1964年,由马瑟荣和他学生提出。它的基本原理是使用特定的结构元素扫描每个像素点,以达到改善形状结构,去除不相关结构,修复区域的目的。常用形态学的运算包括膨胀、腐蚀、开运算、闭运算、顶帽变换、骨骼化等[9]。
本文需要去除细微孤立区域并连接相近的较大的区域,针对该情况,单单使用膨胀或腐蚀效果是较差的,而使用开运算、闭运算会有较好效果。如图3,(a)是二值化图像;(b)则是先进行开运算,再膨胀,算法在去除孤立区域的同时也填充了中间的缝隙。
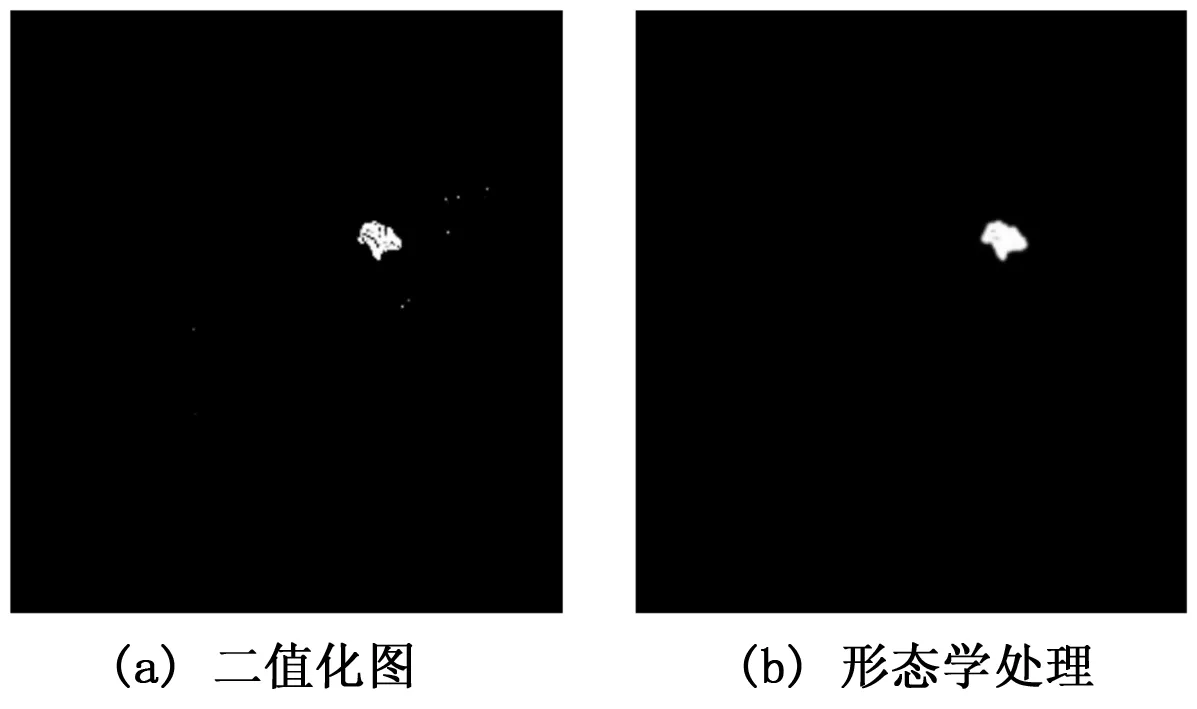
图3 形态学处理结果
1.7 残留区域测量
预处理后的二值图像需要进一步测量以获取每块残留物的大小、位置,方便软件操作人员用工具剔除。轮廓跟踪和连通区域标记均可以实现测量物体的几何形状和特征,但前者仅能得到被测物体的外轮廓,在一些特殊情况,比如残留物体内部有孔洞,则影响几何参数的测量。连通区域标记则不会出现该情况,因此本文使用连通区域获取残留物参数。完成连通区域标记后,即可测量出残留物的面积和位置。
连通区域的面积A等于该区域像素点的总数,在连通区域标记的过程中就可以计算出来,对所有属于该区域的像素点坐标求均值即可获取中心位置,即:
(4)
如图4,矩形内是检测到的残留物,它的位置是(1 237.73,725.15),面积为8 886。

图4 残留测量结果
2 实验结果
本文的测试环境是i3-3220 3.3 GHz,4 G内存,拼接的图像分辨率是2 592×1 944,进行耗时和稳定性测试。
2.1 耗时测试
对于大部分模具,残留检测的时间在一秒以下即可保证工作效率。
表1是处理其中一帧图像时以上各个处理过程的耗时,总耗时约340 ms,满足加工过程要求。从表1可以看到,匹配定位占用最多时间,达到280 ms,占检测总耗时超过80%,说明该算法效率还有待提升,若能得到较大改善,可以大幅提升检测算法的速度。

表1 各处理过程耗时
2.2 稳定性测试
将一块残留物放置在模具的某个位置,对它进行一定时间的测量,观察每次测量的残留物位置和面积,若都能在一定误差范围内,则检测算法在残留物处于静态时是稳定的。
表2是随机抽取的10帧图像的测量参数。对于坐标,它的浮动范围是指坐标测量的最大值减去最小值,面积的浮动范围是它的最大值和最小值的差占面积均值的百分比。可以看到检测到的残留物位置和面积都是比较稳定的,浮动在十几个像素左右,对检测没有影响。

表2 检测算法稳定性测试1
除此以外,还应该确保残留物在任意位置都可以检测稳定。本文的测试方案是:将4块残留物放置在目标区域,测量它们各自的面积,然后将它们都移动到另外一个位置再进行测量,反复进行10次,观察结果是否稳定。
表3是测试结果,可以看到,它们的浮动都在5%以下,说明检测算法具有较高稳定性,适合本文使用。

表3 检测算法稳定性测试2
2.3 光照补偿测试
将光源调亮后,若不使用光照补偿,则会得到如图5(a)的二值化图,出现了很多误检区域,图5(b)是经过补偿后的二值化图,未调亮前的残留物大小是8880个像素,经过补偿后检测的大小为8310个像素,相差不大,说明算法在光照变化较大时依然能保证判定正确。

图5 光照补偿对比
3 结论
针对每次滴塑完成后模具上会有残留物的问题,本文基于机器视觉技术,提出了一种采用差分图像的检测算法,输入图像经过平滑滤波后,通过模板匹配、亮度的线性补偿算法、形态学处理和连通区域标记算法测量出残留物的位置和大小。经过测试表明,该检测算法具有较高的稳定性并具有较高的抗光照干扰能力,能够满足滴塑的生产要求。
[1] 郭 伟. 浅谈滴塑工艺技术[J].今日印刷,2008(8):37-39.
[2] 马 琳,王直杰,朱晓明,等. 基于灰度共生矩阵的注塑模具瑕疵检测[J]. 电子设计工程,2015(7):138-140.
[3] 张果胜. 基于模板的异常检测系统及其关键技术研究[D].长沙:中南大学,2010.
[4] 尹 华. 制笔生产中复杂模具异物检测算法研究[D].杭州:浙江理工大学,2012.
[5] 邵 平, 杨路明, 黄海滨, 等. 基于积分图像的快速模板匹配[J]. 计算机科学, 2006(12):225-229.
[6] 杨金锋, 师一华, 熊兴隆. 光照处理中改进的Gamma矫正方法[J]. 中国民航学院学报, 2006(4):39-42.
[7] Otsu N. A threshold selection method from gray-level histograms[J]. Automatica,1975, 11: 23-27.
[8] Sinha D, Giaridna C R.Discrete black and white object recognition via morphological function[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 1990, 12(3):275-293.
[9] Gonzalez R C,Wood R E. Digital image processing[M].Third Edition. Online:Pearson Education India, 2011:27-31.
Plastic Drop Mold Residual Detection Algorithm Based on Difference of Image
Deng Gaosheng,Li Di,Wang Shiyong
(School of Mechanical and Automotive Engineering, South China University of Technology,Guangzhou 510640,China)
Mold is forming tool for industry products. For plastic drop process, the mold residue will cause the worse quality of the product. As for this problem, it proposes a residual detection algorithm based on difference image. First, template matching algorithm based on gray image is used to locate the detection area. Then it calculates the difference of standard image and current image. Binary image is obtained by thresholding and making morphology processing on the difference image. Finally, it calculates the position and size of residuals by connected component analysis. As for mistake detection problem caused by illumination changing , a global illumination compensation algorithm is used to reduce its impact.The test result shows it has high efficiency and stability and is suitable for mold residue detection.
plastic drop; residue detection; difference of image
2016-06-08;
2016-07-08。
国家科技支撑计划项目(2015BAF20B01);广东省科技计划项目(2012A090100012, 2013B010134010, 2014B090921003,2014A050503009);广州市科技计划项目(201508030007,201604010064)。
邓高生(1991-),男,广东茂名信宜人,硕士研究生,主要从事机器视觉方向的研究。
1671-4598(2016)12-0014-03
10.16526/j.cnki.11-4762/tp.2016.12.005
TP29
A
猜你喜欢
数学杂志(2022年5期)2022-12-02
中国机械工程(2022年8期)2022-05-09
西部交通科技(2022年2期)2022-04-27
食品安全导刊(2021年21期)2021-08-30
新世纪智能(数学备考)(2021年5期)2021-07-28
儿童时代·幸福宝宝(2021年1期)2021-03-29
石油沥青(2019年6期)2020-01-16
小资CHIC!ELEGANCE(2019年40期)2019-12-10
音乐教育与创作(2019年8期)2019-05-16
东方考古(2016年0期)2016-07-31