基于模糊PID自适应算法的重介质洗选煤控制系统研究
2017-01-19 05:07杨丽
中国矿业 2016年12期
杨 丽
(呼和浩特职业学院计算机信息学院,内蒙古 呼和浩特 010051)
基于模糊PID自适应算法的重介质洗选煤控制系统研究
杨 丽
(呼和浩特职业学院计算机信息学院,内蒙古 呼和浩特 010051)
在重介分选过程中,重介质悬浮液的密度控制效果直接决定重介分选的产品质量。本文针对重介质洗选煤过程中使用介质悬浮液密度和介质桶液位变化存在的时变、非线性等特征,采用模糊PID自适应算法,建立了重介质洗选煤过程控制模型。该模型由模态识别器和模糊PID自适应控制器组成,协同对主选分流执行阀、加介分流执行阀和清水阀进行调节,以实现对介质悬浮液密度和介质桶液位的控制,并进行工业运行试验。结果表明: 采用模糊PID自适应算法的重介质洗选煤控制系统,对介质悬浮液密度和介质桶液位控制相对于常规PID控制调节,具有精度较高、响应速度快等优点,满足洗选煤过程控制要求。
重介质选煤;模糊PID自适应;悬浮液密度;介质桶液位
在重介质洗选煤过程中,对重介质悬浮液的密度控制程度将直接影响重介分选的产品质量,所以对其密度的控制条件非常苛刻,不仅要保证重介质的密度实时稳定于规定密度值区间内,而且还要确保控制系统调节介质悬浮液密度的响应速度要快,以去除各种调节滞后成分的影响[1]。现阶段对重介质悬浮液的密度控制主要采用PID控制,当随着生产的进行,合介桶中的液位越来越低,一旦系统受到随机干扰时,系统的动态性能会变差,并且在进行介质桶内重介质密度调整时,由于加料阀和加料泵的动作的迟滞性,常规的PID调节很难得到理想的控制效果,同时由于工作介质回流密度和流量、循环水的密度和流量、注入重介质的密度和流量,流出介质桶的密度和流量等物理量之间是一个非线性的耦合关系。因此单纯的PID调节满足不了现场的需要,不能做到真正的自动调节。通过阅读大量相关文献,得知模糊理论是解决在控制过程中各种信号量不易定量表示的有效途径,可运用模糊推理实现对PID控制参数的最佳调整。以此提出基于模糊PID控制器的重介质洗选煤控制系统,将模糊控制技术与传统的PID控制技术结合起来共同应用于系统的调节当中,有效地解决误差不稳定、动态特性不理想的问题,保证了控制系统的精度,实现在生产过程中不断调整介质悬浮液密度与介质桶液位,实时保证其规定范围内。缩减选煤厂生产准备时间以及提升选煤厂的生产效率及质量。
1 介质悬浮液的基本控制原理与控制模型构成
1.1 基本控制原理
选煤厂运用重介旋流器实现原煤分选,其工艺流程见图1,其中原煤与循环介质同步输送至混料桶,随之经二产品重介质旋流器完成分选,然后再实现其底流及溢流的脱介、脱水及相关处理,最终获得精煤、中煤以及矸石产品,然而其介质就经过介质系统完成其回收以及浓缩,以实现其循环利用[2]。

图1 重介质选煤工艺流程图
由图1可以看出,重介质悬浮液的密度控制实际为一个闭环控制系统,其主要是执行主选分流执行阀、加介分流执行阀以及清水阀以完成对密度的控制,经过密度计来反馈密度值,从而完成对合介桶中悬浮液密度的闭环控制。如果检测密度比较低,那么就增加高浓介质入料阀门的开度;如果检测到密度比较高,那么就增加清水阀门的开度。通过这样的操作能够得出,不管是放入高浓介质还是清水,在更改密度的同时,都将会对液位的稳定产生影响[3]。所以应该兼顾考虑介质桶的液位与介质悬浮液密度控制,即若密度偏低的同时液位也过低,则要采取加入高浓度的介质措施;若密度偏高液位过低,则要采取加入清水措施;若液位超过最高限值,则要采取打开分流阀措施以降低液位再然后再执行下一步调节等。
1.2 介质悬浮液控制模型构成
根据重介质悬浮液基本控制原理,本文针对重介质选煤过程重新构建了基于自适应PID技术的模糊控制模型[5],其基本控制模型结构见图2。据图2所示,模型主要由模糊自适应PID控制器和模态识别器两部分组成,其中模态识别器根据合格介质桶的液位高低变化,选择介质悬浮液密度模糊自适应PID控制器对主选分流执行阀、加介分流执行阀以及清水阀的控制,把介质悬浮液密度控制在规定值区间内的同时要兼顾确保液位也在规定区间内[6]。
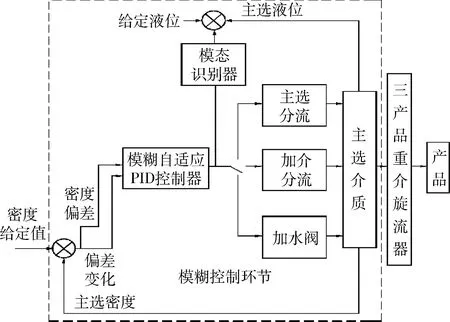
图2 重介质选煤过程模糊控制模型
1.3 模态识别器的设计
根据洗选煤控制的要求,洗选过程中对介质桶中液位控制分3种状态,分别为正常、高位和低位,因此模态识别器也分别对应3种判断状态,具体控制策略为:当介质桶液位在高位时,选择模糊自适应PID控制器对分流执行阀进行控制,使液位达到正常值;当介质桶液位位于正常值时,根据密度偏差控制相应的执行阀,如密度值偏低,控制加介分流执行阀调整悬浮液密度,反之,控制清水发调整悬浮液密度;当介质桶液位在地位是,根据介质桶悬浮液密度控制相应执行阀,调整介质桶液位与悬浮液密度[8]。
2 模糊PID控制器的设计
本控制结构在设计之初,出于对悬浮液密度控制结果必须满足要求的目的,其控制器采用两维输入、三维输出结构。其中,二维输入分别为把悬浮液密度设定密度与悬浮液实际密度之差e和变化率ec;三维输出分别为PID控制的三个调节参数变化值ΔkP、ΔkI、ΔkD。通过PID控制的ΔkP、ΔkI、ΔkD与e和ec的模糊关系,进而通过模糊自适应PID控制器对采集的信息和记忆信息不断检测并重新计算e和ec的值,然后根据模糊关系分别对ΔkP、ΔkI、ΔkD进行自适应调整。
2.1 语言变量的模糊化设计
上述的e和ec通过模糊调整后变为E、EC,其中输入偏差e的基本论域为[-e,e],E论域为[-3,-2,-1,0,1,2,3],输入偏差变化率ec基本论域为[-ec,ec],EC论域为[-3,-2,-1,0,1,2,3]。
输出ΔkP基本论域[-m,m],量化论域ΔkP=[-3,-2,-1,0,1,2,3],而另外的ΔkI、ΔkD的模糊原理与ΔkP类似。
2.2 输入输出变量的模糊子集及其隶属度函数确定
根据上述得到的输入变量E和EC,以及三个输出变量ΔkP、ΔkI、ΔkD,该五个参数构成的模糊子集同为:[NB,NM,NS,ZO,PS,PM,PB],其中NB,NM,NS,ZO,PS,PM,PB分别代表负大,负中,负小,零,正小,正中,正大。
这里采用隶属函数的方式来对精确量进行模糊化处理。因此,本系统具体采用三角形隶属函数,来处理E、EC、ΔkP、ΔkI、ΔkD的隶属关系,其具体隶属函数见图4。
由图4所示的隶属函数,分别得到e、ec和ΔkP、ΔkI、ΔkD的隶属函数,其具体关系见表1、表2。
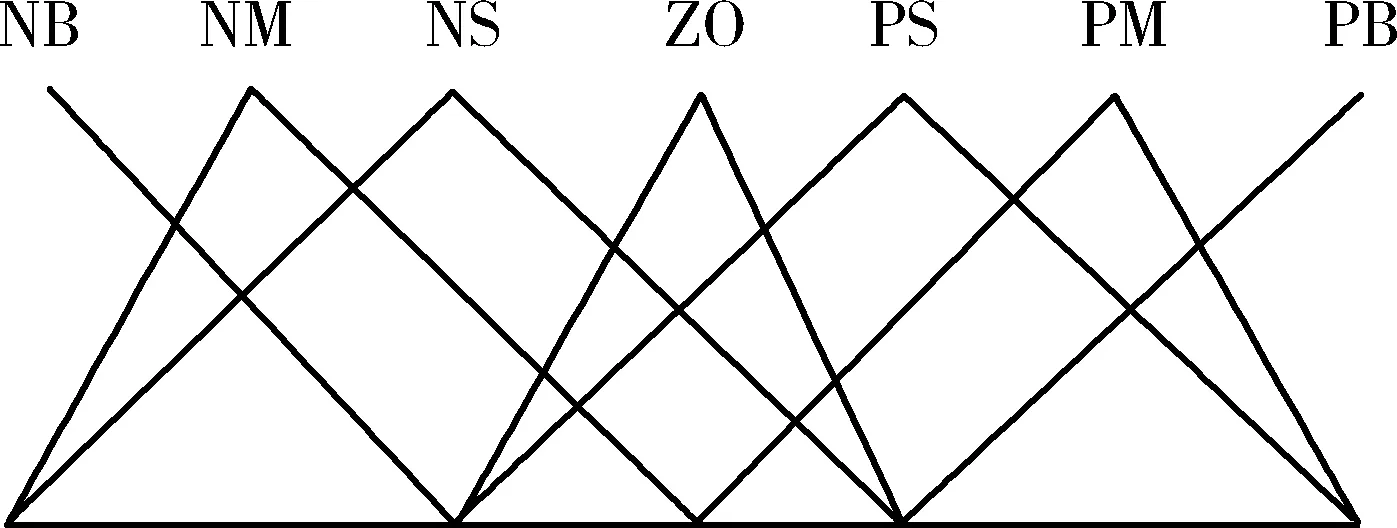
图4 三角形隶属度函数
表1 e、ec隶属函数表

ec、ePBPMPSZONSNMNB-3000000.51-200000.510.5-10000.510.500000.510.500100.510.500020.510.50000310.500000

表2 ΔkP、ΔkI、ΔkD隶属函数表
2.3 模糊规则制定及模糊关系求解
通过总结现场工作人员的操作经验和专业技术人员的技术知识,这里获得了针对ΔkP、ΔkI、ΔkD参数的控制规则,其具体模糊控制表见表3。
这里使用Mamdani型推理规则中的条件语言,采用if…then…的具体方式进行模糊推理,根据表3可获得三个参数变量对应的49个模糊关系,随后对这些模糊关系取“并”运算,即可得到由输入e、ec到输出ΔkP、ΔkI、ΔkD的模糊关系R,见式(1)。
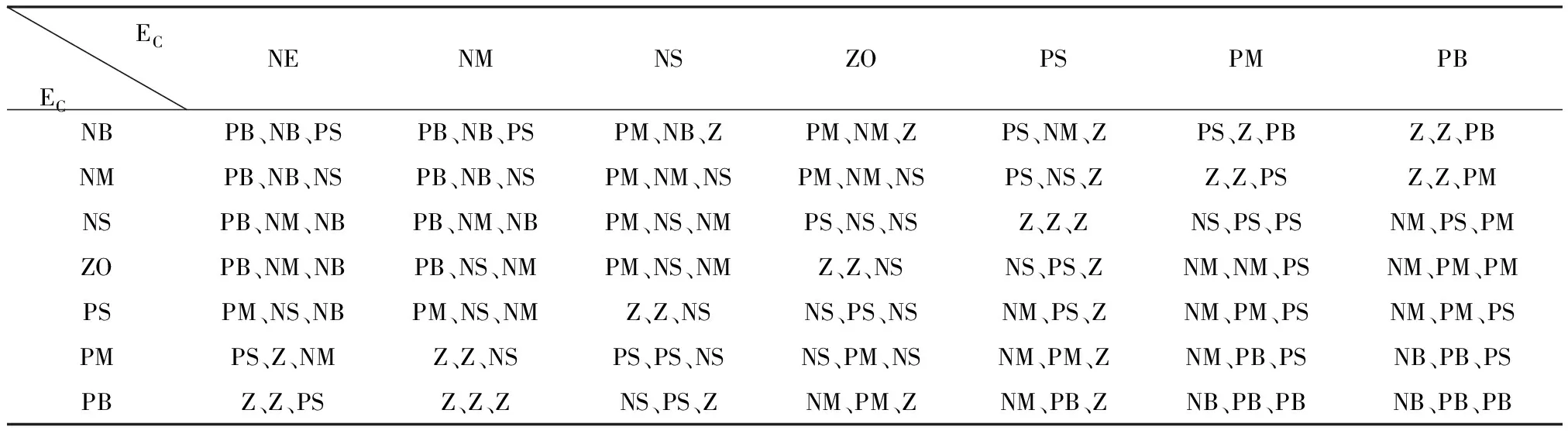
表3 ΔkP、ΔkI、ΔkD模糊控制表
(1)
这里以ΔkP为例,其模糊推理公式见式(2)~(3)。
ΔkP=(E×EC)oRP
(2)
R1=(NBE×PBΔkP)×(NBEC×PBΔkP)
(3)
根据控制系统得到的实际误差量e和其误差变化ec,得出控制量ΔkP1见式(4)。
ΔkP1=eo(NBE×PBΔkP)×eco(NBEC×PBΔkP)
(4)
同理,再求得另外48个控制量ΔkP2,ΔkP3,…ΔkP49,并以模糊集合ΔkP表示,见式(5)。
ΔkP=ΔkP1+ΔkP2+…+ΔkP49
(5)
为了得到精确地控制量,这里采用平均最大隶属度法进行判决得到ΔkP的模糊控制查询表,见表4。依此类推得到ΔkI、ΔkD的模糊控制查询表。
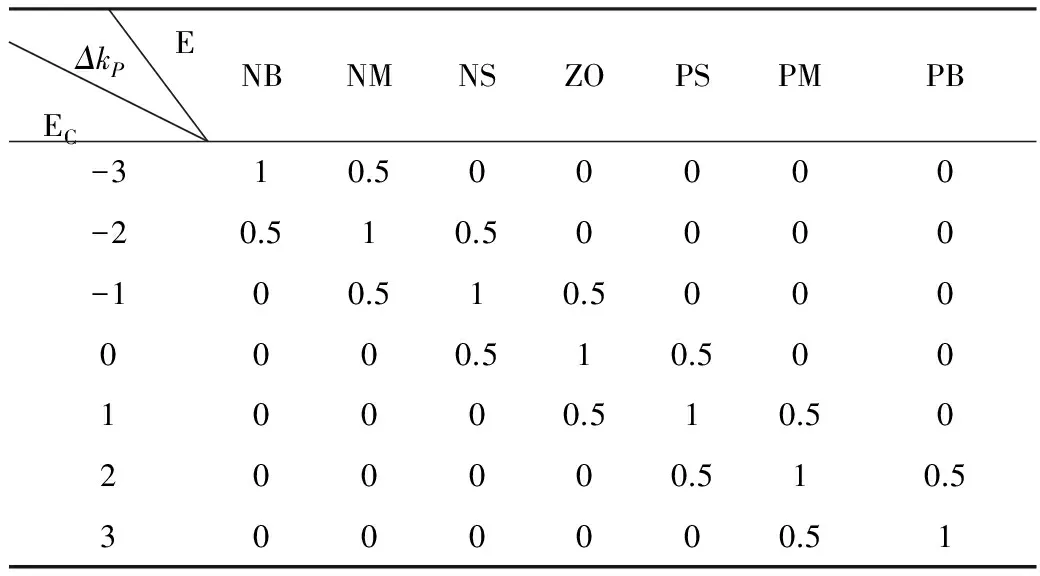
表4 ΔkP模糊控制查询表
2.4 模糊PID参数计算
井下采煤机在实际工作时,其内部控制器通过连续运算,随时记录下e和ec的偏差,并对其模糊化处理,再通过查询模糊控制表以获得ΔkP、ΔkI、ΔkD的值,最后为实现对PID控制器参数的调整,将上述参数带入下列调整公式,从而获得最佳的PID参数值,见式(6)~(8)。
(6)
(7)
(8)
3 PID控制算法仿真和分析
为了验证模糊自适应PID控制算法的准确程度,是否能够有效的达到介质悬浮液密度控制的效果,工业运行试验采用3NWX1200/850型无压给料三产品重介质旋流器,分别进行了高低液位下密度控制,以及在保证密度给定值不变的前提下其液位改变后的试验,其效果见图4。
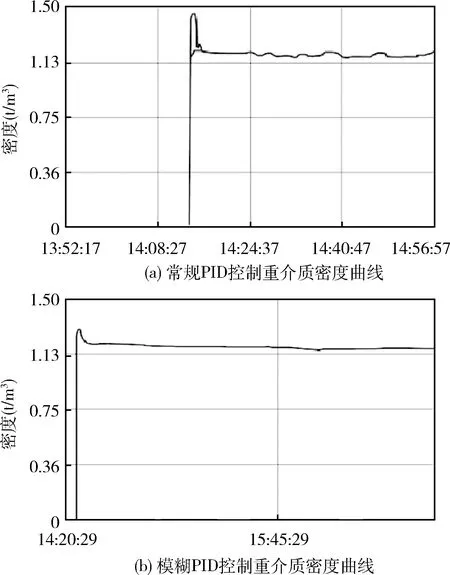
图4 常规PID与模糊PID控制重介质密度曲线对比
其中图4(a)为采用常规PID控制的重介质密度曲线,其控制超调量ε=11%,控制稳定时间为92s,温度误差为5%。图4(b)为采用模糊PID控制的重介质密度曲线,其控制超调量ε=5%,控制稳定时间为31s,温度误差为1%。由此表明使用模糊自适应PID控制算法的重介质选煤控制系统,可以在保证液位在规定范围之内情况下快速、有效地将介质悬浮液密度控制在设定值附近。从仿真结果可以看出模糊自适应PID控制的优势。
1)模糊自适应PID控制和常规PID控制相比,超调量有明显减少,达到稳定时期的调节时间也明显减少了,几乎没有振荡次数,能够很平稳的进入稳态。
2)模糊自适应PID控制比常规PID控制控制性能优良而且动态性能和稳态精度都有明显提高。
3)由于模糊控制不需要精确度的数学系统模型,不仅可以克服非线性因素而且对变系统能进行实时控制,与PID控制相结合是一种非常有价值的控制方案。
4 结论
基于模糊自适应PID控制算法的重介质选煤控制系统,对具有非线性、时变性等特性的介质悬浮液密度以及介质桶液位控制产生了良好的控制效果。能够有效的确保其控制精度、同时避免了各执行机构频繁动作,拥有很强的实用性。通过系统工业性试验结果表明该控制系统的可行性,其控制结果满足设计要求,系统响应速度快。但是,其中涉及的模糊控制规则以及隶属函数均是通过人为总结、实验得出的,精确度无法得到较好的保障,建议在后续的研究中能够采用引入遗传算法,使其具备在线学习功能以实现模糊控制决策规则的在线调整,这将会更好地提升此控制方法的精确性。
[1] 陈震, 郭楠, 张杨. 国内选煤厂自动化技术现状及发展趋势[J].煤炭与化工, 2014(3): 10-12, 17.
[2] 陈占文, 郭德.我国中煤再选研究现状与可行性分析[J].煤炭科学技术, 2014(5): 114-117, 128.
[3] 杨建国, 王羽玲.重介旋流器结构参数对分选效果的影响[J].中国矿业大学学报, 2005, 34(6): 770-773.
[4] 赵春祥, 叶桂森.重介质选煤过程控制模型及控制算法的研究[J].煤炭学报, 2000(12): 196-200.
[5] 雷平. 重介悬浮液密度模糊自适应PID控制研究[J]. 煤炭技术, 2012(12): 103-104.
[6] 张诚, 赵曜. 基于模型的预测控制理论发展及应用[J].电子技术与软件工程, 2014(4): 256-257.
[7] 王波, 张致维, 王然风. 重介悬浮液密度自动控制系统的设计[J]. 控制工程, 2011(S1): 69-71.
[8] 郭楠, 陈震, 罗旭辉. 重介质选煤自动控制技术研究[J]. 工矿自动化, 2014(6):34-36.
[9] 张矿伟, 张少杰, 赵晓霞, 等.基于Fuzzy-PID控制在重介质洗选煤控制系统中的应用[J]. 贵州大学学报: 自然科学版, 2013(6):104-106.
[10] Peng, F.F.,Xia, Y.K. Analysis of a dense-medium separator for coarse coal separation using computational fluid dynamics[C]//Minerals and Metallurgical Processing, 2007: 1-12.
[11] E.J. Meyer,I.K. Craig. The development of dynamic models for a dense medium separation circuit in coal beneficiation[J].Minerals Engineering,2010(10):791-805.
[12] 朱雷平. 重介悬浮液密度模糊自适应PID控制研究[J]. 煤炭技术, 2012(12): 103-104.
[13] 张诚, 赵曜. 基于模型的预测控制理论发展及应用[J]. 电子技术与软件工程, 2014(4): 256-257.
[14] 郭西进,孔令烨,杨春宝.重介质合格桶液位与密度的模糊控制系统研究[J]. 煤炭技术, 2014, 33(10): 243-245.
Research on the dense medium coal cleaning control system based on the fuzzy PID adaptive algorithm
YANG Li
(School of Computer and Information, Hohhot Vocational College,Hohhot 010051,China)
In dense medium separation process, the density control effect of heavy medium suspension directly decided to dense medium separation of product quality. This paper aim at dense medium coal cleaning process use medium suspension density and medium barrels of liquid level changes of time-varying, nonlinear and so on characteristics, using an adaptive fuzzy PID algorithm, dense medium coal cleaning process control model is established. The model consists of the modal recognizer and fuzzy PID adaptive controller, synergy to select executed valve, dielectric shunt valve and water regulating valve, in order to realize the control of the medium level slurry density and medium bucket, and the industrial operation test. Results show that using an adaptive fuzzy PID algorithm of dense medium coal cleaning control system, the suspension of medium density and dielectric barrel level control precision, and fast response speed, satisfies the requirement of coal cleaning process control.
dense medium coal preparation; the fuzzy adaptive pid; suspension density; medium level barrels
2016-04-15
杨丽(1972-),女,汉族,内蒙古呼和浩特人,硕士,副教授,研究方向为高等数学应用、数学教学论、方法论。
TD94;TP273
A
1004-4051(2016)12-0117-04
猜你喜欢
选煤技术(2022年1期)2022-04-19
选煤技术(2022年1期)2022-04-19
成都信息工程大学学报(2021年6期)2021-02-12
矿业科学学报(2020年6期)2020-11-09
湖北理工学院学报(2020年4期)2020-08-22
含能材料(2020年8期)2020-08-10
电子制作(2019年16期)2019-09-27
科技视界(2018年19期)2018-10-09
电子制作(2016年21期)2016-05-17
汽车零部件(2015年5期)2015-01-03