数字滞环控制器设计
2017-01-20 09:55张建生张永华宋朋飞
电源技术 2016年3期
张建生, 张永华, 宋朋飞
(1.河海大学能源与电气学院,江苏南京211000;2.常州工学院电子信息与电气工程学院,江苏常州213002)
数字滞环控制器设计
张建生1,2, 张永华1, 宋朋飞1
(1.河海大学能源与电气学院,江苏南京211000;2.常州工学院电子信息与电气工程学院,江苏常州213002)
分析了滞环控制开关频率不固定的原因,并在原有基础之上进行改进,设计了一种新的数字滞环控制器,实验结果表明,可以方便限制最高开关频率及保持较高的控制精度。
滞环控制;数字化;开关频率
滞环控制是一种广泛应用的跟踪控制技术,具有硬件电路比较简单、响应速度快、不需要载波、输出波形不含有特定频率的谐波分量等优点[1]。但是其开关频率不固定,致使设计滤波电路困难,此外开关频率有可能超过开关管的截止频率。针对滞环控制的特点以及数字化实现的要求,设计了数字化滞环控制器。
1 滞环电流控制的拓扑及基本原理分析
滞环电流控制电路拓扑如图1所示,工作原理[1-2]:当指令电流与实际电流的偏差-到达滞环比较器上界时,给VT1施加关断信号,延时给VT2施加导通信号,由于负载是感性负载,VT2承受反压而不能立即导通,先由VD2续流,电流减小,直至-等于零,VT2导通,电流继续减小;当-到达滞环比较器下界时,给VT2施加关断信号,延时给VT1施加导通信号,同理由于负载是感性负载,先由VD1续流,电流增大,直至-等于零,VT1导通,电流继续增大;当-到达滞环比较器上界时,给VT1施加关断信号,延时给VT2施加导通信号,循环下去。图2所示为滞环电流控制波形及触发脉冲信号。

图1 滞环电流控制电路

图2 滞环电流控制工作原理及形成VT1的触发信号
2 开关频率的分析
在高频逆变电路中,对于阻感负载来说,开关管导通时,即电源侧向负载供能时[3-4],有:

将(3)式代入(2)式,并求导则有:

当开关管关断时,即负载向电源侧馈能时,有:

解得:

同理可得电流变化率为:


图3 最大开关频率时各参数示意图
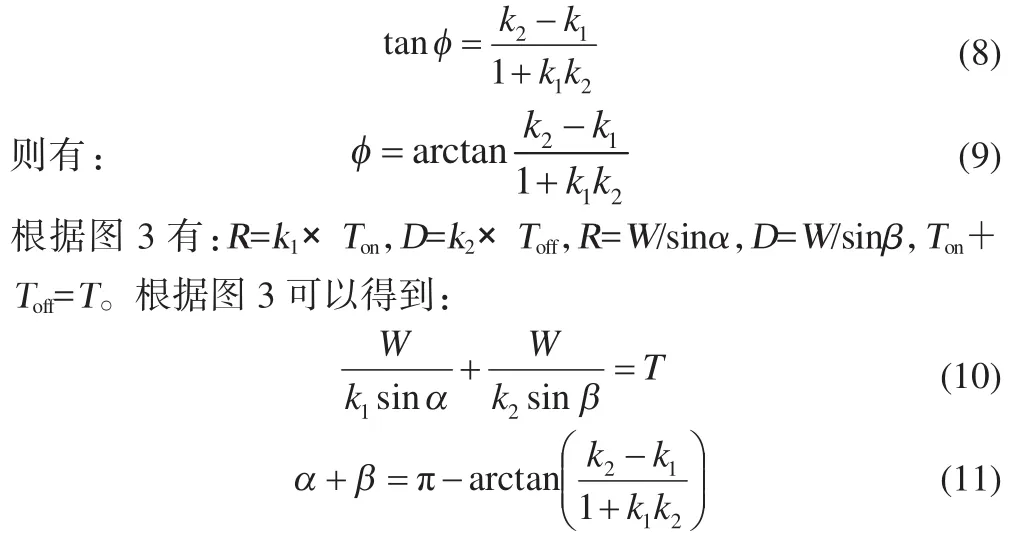
当滞环环宽是固定的时候,在开关频率最大处有:

式中:δ为指令信号与水平线间夹角,联立(10)~(13)式,可以确定开关的最大频率。从式(10)、(11)可以看出,对于滞环控制电路来说,参数之间显然是非线性关系,保证开关频率不变,实施起来很不方便。可见,当电路参数确定之后,实际输出波形与指令信号变化非同步变化时,会导致指令信号与实际信号相对变化率成非线性,最终导致开关频率的不确定性。针对模拟式滞环控制器的特点,设计了数字滞环控制器,可以较好地解决滞环控制频率不固定而导致开关频率可能会超过开关器件的截止频率问题,限制开关最高频率。
3 数字滞环控制实现方案及结论
数字滞环控制思想:根据滞环环宽和负载参数来大体确定开关管的最高频率,即开关管的最小周期。将开关最小周期设置为定时器定时时间。当指令信号变化率大于|γ|时,开关频率接近于最大开关频率,取消定时设置,直接使用滞环控制工作。当指令信号变化率小于|γ|,开启定时器功能来保证开关频率的相近性。当指令信号处于上升的阶段时,且指令信号大于实际信号时,输出高电平;当定时时间到,且指令信号小于实际信号时,输出低电平。当指令信号处于下降的阶段时,且定时时间到,指令信号大于实际信号时,输出高电平;当指令信号小于实际信号时,输出低电平。通过Matlab Simulink进行仿真实验,仿真结果如图4所示。实际控制系统以DSP 2812作为控制器,其高速数字处理功能,可以保证系统实时性和控制精度。实验结果如图5所示。
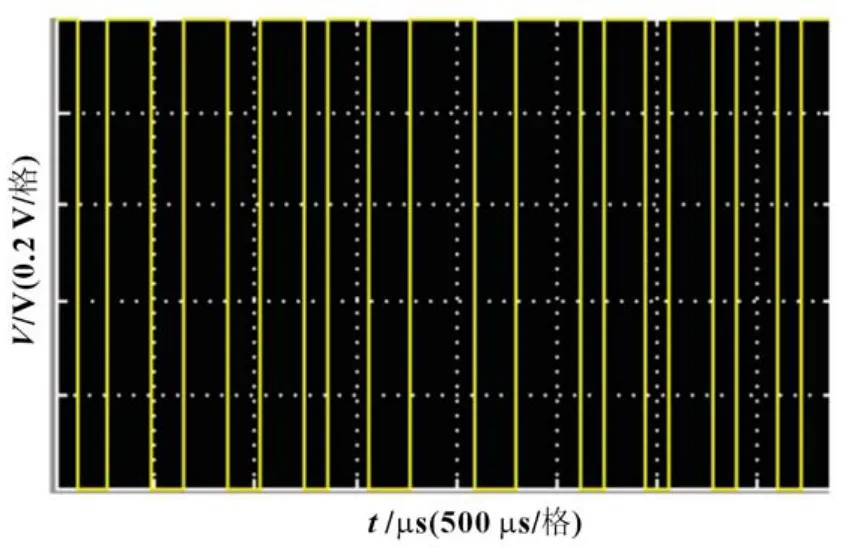
图4 仿真结果

图5 实验结果
主程序流程图如图6。
从仿真结果和实验结果可以看出开关频率基本保持不变。说明该方案是可行的。

图6 主程序流程图
[1]王兆安,黄俊.电力电子技术[M].北京:机械工业出版社,2000.
[2]李宋,叶满园.随机带宽滞环电流控制技术[J].电力电子技术,2010,44(9):72-73.
[3]张加胜,郝荣泰.滞环控制变流器的开关频率研究[J].电工电能新技术,1998(1):54-56.
[4]孟建华,蔚泉清,刘靖峰.定时和滞环相结合的跟踪控制方法[J].西安工程大学学报,2008,22(5):592-595.
Designation of digital hysteresis controller

The reason which the switching frequency of hysteresis control without fixing was analyzed.A new digital hysteresis controller was designed based on the original design.The experiment results show that it makes it easily limiting the maximum switching frequency and acquiring higher control accuracy.
hysteresis control;digital;switching frequency
TM 57
A
1002-087 X(2016)03-0690-03
2015-08-27
国家自然科学基金 (51175052);常州市科技项目(CJ20130014)
张建生(1958—),男,江苏省人,博士,教授,硕士生导师,主要研究方向为计算机数字控制与控制工程。
猜你喜欢
煤气与热力(2021年12期)2022-01-19
湖南电力(2021年4期)2021-11-05
初中生世界·九年级(2020年9期)2020-09-21
电信科学(2016年10期)2016-11-23
电测与仪表(2016年14期)2016-04-11
科技传播(2015年20期)2015-03-25
中学生理科应试(2014年12期)2015-01-15
西安航空学院学报(2014年5期)2014-07-13
汽车零部件(2014年2期)2014-03-11
筑路机械与施工机械化(2014年4期)2014-03-01