基于目标特征的机械零件表面缺陷检测方法
2017-01-20 09:34王诚诚李文森雷鸣管声启
软件 2016年4期
王诚诚 李文森 雷鸣 管声启

摘要:针对机械零件表面缺陷的特点,提出了一种基于目标特征的检测方法。首先,通过对测试图像进行均值滤波,以消除噪声对检测的影响;其次,通过分析表面缺陷特征设置分割阈值,在此基础上,实现对检测目标分割;最后,采用形态学滤波消除噪声和孤立点对检测结果的影响。实验表明,本文采用的方法能够有效抑制图像背景干扰,能够有效的实现机械零件表面缺陷准确检测。
关键词:机械零件;表面缺陷;目标特征;检测方法
中图分类号:TP391.41 文献标识码:A DOI:10.3969/j.issn.1003-6970.2016.04.009
0 引言
在机械零件加工以及使用过程中,机械零件表面会产生裂纹等缺陷,这些缺陷严重影响着机械零件表面质量;因此,对这些机械零件表面质量监测有着重要意义。然而,传统的监测方法是由人工离线抽检完成,这种方法依赖于检验人员的检验,不能实时发现产生的缺陷。图像检测技术可以通过对所采集图像的进行图像处理,从而实现在线检测,而基于图像处理的检测技术关键在于图像处理算法。
目前,基于图像处理的机械零件表面缺陷检测方法很多,分别针对刀具、带钢、齿轮、轴承等的机械零件表面缺陷检测提出了空间域检测方法(边缘检测法、零均值化法)和小波域的检测算法等。其中,零均值化方法是通过构造零均值化图,并采用阀值分割出缺陷区域,这种算法虽然简单,但检测缺陷区域误差较大;边缘检测方法是通过检测缺陷边缘实现对缺陷的检测,这种方法只能提取缺陷的大致边缘,不能检测出完整缺陷区域;小波域的检测算法是利用小波分解使正常区域信息与缺陷区域信息相分离,从而实现缺陷区域的检测。
然而,缺陷区域分割好坏很大程度上依赖小波滤波器构造的性能,如何构造小波滤波器是研究的难点问题,目前没有统一的方法。
事实上,人类视觉系统在有先验知识的前提下,总是在视野中搜索与先验知识相匹配的检测目标特征,并对这些目标进行优先处理,这就是人类具有的检测机制。如果将这种机制引入到机械零件表面王诚诚等:基于目标特征的机械零件表面缺陷检测方法缺陷检测中,利用缺陷特征作为机械零件缺陷检测条件,就有可能把注意力集中到缺陷所在的区域,从而避免环境因素对检测的影响,实现对缺陷区域的准确分割。为此,采用检测目标特征设定分割阈值,实现对机械零件表面缺陷的准确分割。
1 机械零件表面缺陷均值滤波
工业现场所采集的图像往往含有噪声,为了消除其对后期缺陷检测的影响,我们拟在所采集的图像中滑动进行均值滤波。
设图像fj,j大小为M×N,则将图像划分为9×9的图像窗口,然后每个窗口灰度均值为:
(1)式中0≤i≤M-1,0≤i≤N-1。
在计算每个子窗口灰度值后,将子窗口均值代替窗口中心的像素值;通过子窗口遍历整幅图像实现滑动均值滤波。
2 基于目标分析的表面缺陷分割
在先验知识条件下,人类视觉总是关注视场中与检测目标相同的特征,并对其特定特征区域进行分析加工,以提高检测快速性和准确性。机械零件表面缺陷大小、形态各异,缺陷种类繁多;然而,这些缺陷又有其共同特征,这就是缺陷区域数目相比较背景总是比较稀少的,如果能够利用这个特性,就能够节省计算机,准确的分割出缺陷信息。通常稀少目标必须满足以下条件:
(1)目标区域必须与背景区域存在一定的区分度,存在一定的对比度;
(2)目标区域数目与背景区域数目相比较是很少的。
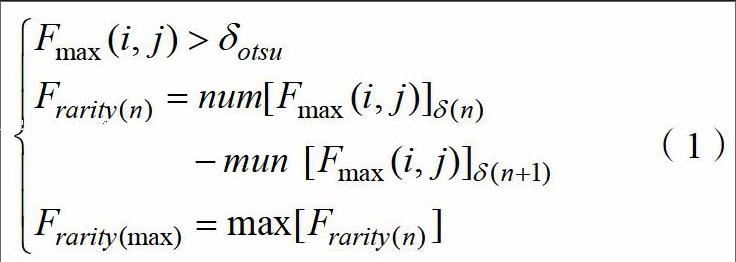
为了满足上述条件,采用公式(1)如下:
(1)
其中,Fmax(i,j)表示机械零件图像(i,j)处的大于δotsu的像素点,δotsu为最大类间方差确定的阈值;Frarity表示目标兴趣区域的稀少度,其数值越大表明越稀少;num[Fmax|δ(n+1))、num[Fmax|δ(n)分别表示在[δotsu,255]之间进行N等分得到一系列阈值δ(1)…δ(n-1)、δ(n)…δ(N)中的第n+l和n次分割时所获得兴趣区域数目;Frarity(max)表示最佳稀少度,即前后相邻两次分割后兴趣区数目差最大,这说明兴趣区域数目已经迅速的变成稀少。
根据公式(1),找出最佳稀少度对应的阈值δ(n+1),采用阈值δ(n+1)分割兴趣区,兴趣区域必须满足公式(2):
(2)
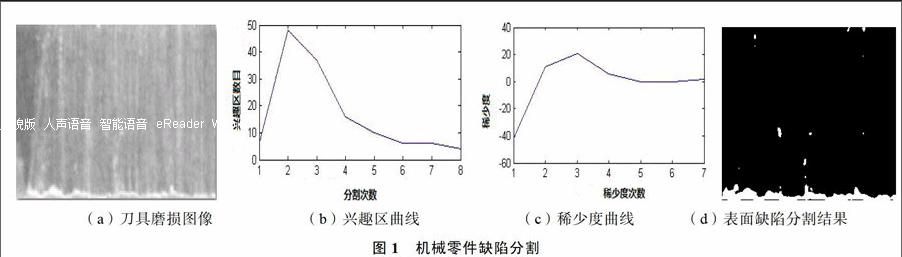
图1示例中,在第3、4次分割检测兴趣区数目差值最大,即稀少度最大;因此,确定分割阈值δ(4),如图2(c)所示,能够有效分割缺陷区域信息。
3 形态学滤波
机械零件表面缺陷图像分割后所得到的区域,通常含有一定噪声和较小的孤立点;为了消除这部分信息对缺陷的影响,本文采用先膨胀、后腐蚀的
形态学闭运算操作;通过闭运算不仅能平滑滤波,而且还能够除去区域中的小孔,填平狭窄的断裂、细长的沟壑以及轮廓的缺口。
设二值图像为I,其连通域设为x,结构元素为S,当一个结构元素s的原点移到(x,y)处时,我们将其记作Sxy。此时图像X被结构元素S闭运算的运算可表示如式(3):
(3)
4 实验与分析
为了验证本文算法分割效果,分别选取车削刀具磨损、齿轮裂纹、带钢缺陷作为检测目标,分割结果如图3所示。可以看出,采用本文方法能够有效分割出缺陷区域。
为了验证本文算法的检测准确率,分别选取车削刀具磨损、齿轮裂纹、带钢缺陷图像各100幅进行试验。其具体步骤为:首先,采用检测人员对测试图像的缺陷区域进行人工标记,并计算缺陷的面积;然后,对测试图像采用本文算法进行分割,并统计前景目标的面积;最后,将人工标记区域面积与本文分割出来的缺陷区域面积进行对比,当误差小于10%,认为被准确检测。试验试验结果表明,三种缺陷检测准确率分别达到了98%、95%、97%,具有较高的检测准确率。
5 结论
本文通过分析机械零件表面缺陷特征,提出基于检测目标特征挖掘的缺陷检测方法;利用机械零件表面缺陷共性特征,确定图像分割阈值,从而实现对缺陷目标的分割;在此基础上,实现对机械零件表面缺陷的准确检测;由于本文采用算法简单、计算量减少,很容易实现硬件化,从而为在线快速自动检测提供了途径。
猜你喜欢
山东工业技术(2017年5期)2017-03-16
科技资讯(2016年26期)2017-02-28
农家科技下旬刊(2016年9期)2016-12-15
中华建设科技(2016年10期)2016-12-14
科技与创新(2015年21期)2015-12-01