航天器故障诊断技术综述及发展趋势
2017-02-07 13:33谢敏楼鑫罗芊
软件 2016年7期
谢敏+楼鑫+罗芊
摘要:对国内外航天器故障诊断技术的发展进行了回顾,总结了航天器故障诊断技术的基本方法,指出基于数据挖掘的航天器故障诊断方法是今后的发展趋势。
关键词:航天器;故障诊断技术;数据挖掘
引言
故障诊断技术是指不进行设备拆卸的情况下,通过相应的方法和技术手段,在设备运行过程中掌握其运行状态,确定是否发生故障并分析出发生故障的原因,预报故障未来的发展趋势。故障诊断技术在各个工业领域都得到了国内外的充分关注,并取得了丰厚的研究成果。
自1957年第一颗人造地球卫星上天以来,全世界发射的航天器已经多达5000多颗。据统计,从1957年至1988年的30年间各国发生灾难性事故的卫星约140颗,造成了重大的经济损失。近十几年来,随着我国发射的卫星越来越多,也出现了很多故障,针对航天器的故障诊断技术已经引起航天领域专家学者的重点关注。
1航天器故障诊断技术的研究现状
航天器作为光机电一体化仪器的设备,由于其规模大、复杂度高、航天器的资源和人工干预能力有限,且太空环境日趋恶劣并存在着大量的不确定性因素等,这些都对航天器的故障诊断技术提出了挑战难以进行有效维护,经常会出现系统异常运行甚至出现故障的情况。因此,航天器故障诊断技术对提高航天器的可靠性、安全性和有效性具有十分重要的作用,已经成为航天领域主要研究方向。
美国和俄罗斯(前苏联)为代表的国家,在航天器故障诊断技术方面做了大量且深入的研究工作。美国国家航空航天局(NASA)从上个世纪七十年代以来便开始研究航天器的在轨故障诊断技术。经过几十年的发展,NASA利用建立的航天器故障诊断平台,对大量故障航天器进行了成功的诊断与维修,保证了航天器的可靠稳定运行,延长了航天器的使用寿命,除了保障航天器可靠稳定的运行外,故障诊断技术对于减少地面工作人员的工作量、航天员的培训时间以及发射与运行成本都具有重要意义。近几年美国投入大量的资金用于航天器系统故障诊断技术研究。尤其是在航天飞机方面,将飞行风险降低了50%,同时运行预算降低了1/3,而且还可能进一步降低。
自上世纪70年代我国成功发射第一颗卫星以来,我国航天领域的技术人员便开始研究航天器故障诊断技术。但是一直以来,相关的研究所和日常管理部门没有建立专业的航天器故障诊断平台,主要依托某卫星测控中心组织实施,在技术上还局限于依靠人工手段对航天器进行在轨管理。航天器发生严重的故障后,需要组织航天领域相关专家和航天器研制人员到故障处置的现场一起进行分析,制定相应的维修方案,并对维修方案进行仿真验证确认后才能根据制定的维修方案对故障航天器进行维修,无法形成一个通用化的航天器故障诊断平台。直到2014年我国首个航天器在轨故障诊断与维修实验室才在西安某卫星测控基地宣告成立。
目前,航天器在轨故障诊断与维修问题,已经成为国际航天领域的热点之一。建立航天器在轨故障诊断与维修通用化平台已经成为各个国家进行航天器在轨管理发展的实际需要和必然趋势。
2航天器故障诊断的基本方法
故障诊断技术最早起源于美国。作为一门学科进行系统研究从上世纪60年代的美国宇航局(NASA)开始,1961年美国开始实施阿波罗计划后出现了一系列的设备故障,促使美国海军研究室主持美国机械故障预防小组开始把故障诊断作为一种技术进行研究开发。1971年,麻省理工学院的Beard发表的博士论文和Mehra和Peschon发表在Automatica上的论文,创新性的提出了运用软件冗余代替硬件冗余的新思想,开启了故障诊断技术研究的开端。
根据系统采用的特征描述和决策方法的差异,形成了不同的故障诊断方法,应用于航天器故障诊断的方法有很多种,其中应用较多的有:基于模型的方法、基于信号处理的方法和基于人工智能的方法。
2.1基于模型的故障诊断方法
基于模型的故障诊断方法是提出最早、研究最为系统的一种方法。基本思想是运用软件冗余代替硬件冗余。基于模型的故障诊断方法分为基于参数估计的故障诊断方法和基于状态估计的故障诊断方法。
2.1.1基于参数估计的故障诊断方法
基于参数估计的故障诊断方法的基本思想是不需计算残差序列,而是根据模型参数及相应物理参数的变化量序列的统计特性来进行故障诊断,更利于故障的分离。因为被诊断对象的故障可以视为其过程参数的变化,而过程参数的变化又往往导致系统参数的变化。1984年Iserman对基于参数估计的故障诊断方法作出了完整的描述。目前研究得较为广泛的有强跟踪滤波器方法和最小二乘法。
2.1.2基于状态估计的故障诊断方法
基于状态估计的故障诊断方法的基本思想是由于系统被控过程的状态直接反映出的是系统的状态,因此只需估计出系统的状态并结合适当的模型即可对被控对象进行故障诊断。这种方法首先利用系统的解析模型和可测信息,重构系统的被控过程,构造残差序列,残差序列中包含丰富的故障信息,再对残差进行分析处理,从而实现故障的检测与诊断。主要有三种基本方法:Beard首先提出故障诊断检测滤波器的方法;Mehra和Peschon提出了基于Kalman滤波的方法;Massoumnia提出的广义一致空间法。在实际应用中,由于系统越来越复杂,很难建立十分精确的数学模型。目前研究较为广泛的是将模型参考自适应的思想引入状态估计中,从而提高系统鲁棒性。
2.2基于信号处理的故障诊断方法
基于信号处理的故障诊断方法,通常是利用信号模型,如相关函数、频谱、自回归滑动平均、小波变换等,直接分析可测信号,提取诸如方差、幅值、频率等特征值,从而检测出故障,不需要精确的解析模型,有很强的适应性。
2.2.1基于输出信号处理的故障诊断法
基于输出信号处理的故障诊断法的基本思路是系统的输出(幅值、相位、频率等)和故障存在着一定的联系,可以通过数学的方法(频谱分析)进行描述。当发生故障时,可以通过系统的输出分析出故障发生的位置及其严重程度。常用的有:将时域信号变换至频域加以分析的方法称为频谱分析的频谱分析法;研究现象之间是否存在某种依存关系,并对具体有依存关系的现象探讨其相关方向以及相关程度的先关分析法等。
2.2.2基于小波变换的故障诊断法
小波变换属于时频分析的一种,是一种新型信号处理方法,是一种信号的时间-尺度(时间-频率)分析方法,具有多分辨率分析的特点,而且在时频两域都具有表征信号局部特征的能力,是一种窗口大小固定不变,但其形状可改变,时间窗和频率窗都可以改变的时频局部化分析方法。基本思路是首先对一系统的输入输出信号进行小波变换,利用该变换求出输入输出信号的奇异点。然后去除由于输入突变引起的极值点,则其余的极值点对应于系统的故障。
目前国内已经有所研究应用的基于小波变换的故障诊断方法主要有三种:利用观测信号的奇异性进行故障诊断;利用观测信号频率结构的变化进行故障诊断;利用脉冲响应函数的小波变换进行故障诊断。基于小波变换的故障诊断方法对输入信号的要求低,对噪声的抑制能力强,灵敏度高,运算量适中,可以进行在线实时检测,在机械系统的故障诊断中取得了不少研究成果。
2.2.3基于时间序列分析的故障诊断法
基于时间序列分析的故障诊断法的基本思想是选取与故障直接相关的状态变量,建立时间序列过程模型,以模型参数作为特征矢量来判别故障的类型。过程模型参数与系统(设备)的内在特性和输入输出隐含着复杂的联系,在长期的设备运行实践中可以用统计的方法得出模型参数与系统典型故障之间的关系,作为故障识别的依据。这种方法可以在缺乏先验诊断知识的情况下,通过对机组运行过程数据序列的统计认识,逐步积累识别故障的能力,建立有效的诊断体系。
2.3基于人工智能的故障诊断方法
基于人工智能的故障诊断方法是故障诊断领域的发展的重点,是现阶段应用最广泛,研究的最多的方向,不需要精确的模型,适用于不确定性的问题。下面介绍几种航天器故障诊断方面比较常用的方法。
2.3.1基于定性模型的故障诊断方法
基于定性模型的诊断方法是由人工智能领域学者提出的一类诊断方法。基于定性模型的故障诊断方法的不需要系统精确的数学模型。基本思想是根据系统组成元件与元件之间的连接(或参数间的依赖关系)建立诊断系统的模型;将过程特性的外部表现和人类专家对故障判断和处理的经验,通过抽象化方法直接建立各种过程变量与故障模式之间的定性模型,对系统进行推理,预测系统的定性行为,通过观测的系统实际行为与预期行为的差异,检测系统是否存在故障,并诊断故障的原因。
在实际应用中,NASA开发的基于定性模型的诊断推理软件先后在深空一号、对地观测卫星EO-1、x-37飞船等实际型号中进行了科学验证或应用。国内在航天领域基于定性模型的诊断技术主要在液体火箭发动机的故障诊断领域取得了一些研究成果。
2.3.2基于专家系统的故障诊断方法
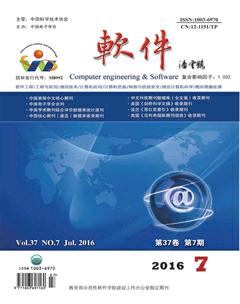
专家系统是人工智能的一个重要分支,能够在一些特定的领域内模仿人类专家的推理能力,来解决复杂的实际问题。基于专家系统的故障诊断方法的基本思路是将某一领域长期的实践经验和大量的故障信息知识,模仿人类专家的推理方式,总结归纳成规则知识库使计算机能够识别,然后将需要诊断的实时的数据输入计算机的数据库中,专家系统利用已经归纳生成的知识库对实时数据进行分析和推理,从而推算出可能的故障,如图1所示。
使用专家系统进行故障诊断的方法在日常的工程应用中已经有了大量的实践,也较广泛的应用于航天器故障诊断领域,如:CLIPS、EXSYS、G2等。
2.3.3基于数据挖掘的故障诊断方法
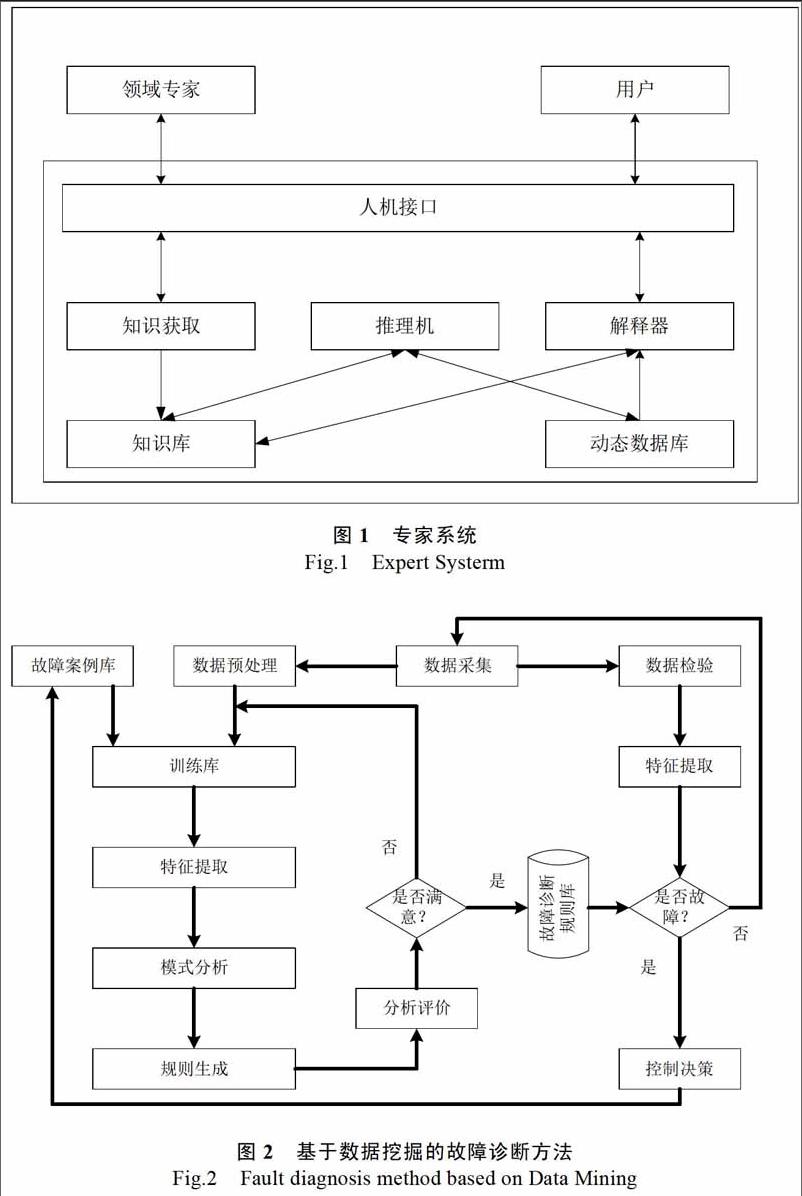
基于数据挖掘的故障诊断方法的核心思想是利用海量的历史数据进行处理从而获取系统的行为模型,通过结合先验知识可及时发现系统出现或者即将出现的故障,如图2所示。
人工神经网络(Artificial Neural Networks,ANN)能够有效地实现输入到输出的非线性映射,是数据挖掘最常用的技术之一。当系统为非线性系统,这类系统一般难以有效建立模型,因而用本身就是非线性映射的ANN来模拟难以建模的非线性系统恰好解决了这一难题。
模糊技术:即利用模糊集理论对实际问题进行评判、决策、模式识别和聚类分析。适用于系统状态及故障状态具有不确定性,并可采用模糊集描述的情况。其主要方法有四种:基于模糊模型的故障诊断方法,基于自适应模糊阈值的残差评价方法,基于模糊聚类的残差评价方法和基于模糊逻辑的残差评价方法。
在航天器故障诊断应用中,利用数据挖掘技术对历史测控数据进行规则挖掘,从海量的样本数据中获取故障诊断的规则,及时发现故障征兆并采取有效措施就可能避免航天器出现重大的故障。NASA领导下的Ames Research Center(ARC)的Inductive Monitoring System(IMS)主要采用聚类的方式对数据进行自动状态分类。通过对哥伦比亚航天飞机失事前数据的分析,发现IMS能比航天飞机控制中心更早发现故障,并于09年用于国际空间站控制中心的ISS管理。
3航天器故障诊断技术的发展趋势
近年来,基于人工智能的航天器故障诊断方法已经成为主要的研究方向,尤其是基于数据挖掘的航天器故障诊断方法不需要建立对象的模型,依靠分析已经积累的海量历史数据,提取出其中的关联关系和趋势特征作为识别故障的依据。
航天器遥测数据包括了航天器运行和控制过程中的各种性能参数数据、状态分析数据、二次计算结果等多种状态数据,这些数据反应了航天器的运行状态。由于航天器系统复杂,参数众多,大多包括成千上万的传感器测量参数,这些参数在设备发生故障之前的一段时间可能就会有一定变化,如温度、压力等参数的异常变化,其也会导致测控过程中的一些其他数据发生异常变化。基于数据挖掘的航天器故障诊断的方法,通过以航天器的遥测数据为研究对象,构建航天器遥测数据的训练库和测试库,利用数据挖掘分类方法训练故障分类器,经测试库数据验证分类器的有效性后,生成对应的故障诊断规则,并利用历史数据对规则进行测试和优化。在故障诊断中,将设备实时的数据与的诊断规则和诊断知识一起代入诊断运算过程,得到故障是否存在、产生的原因和处理的方法。这种方法可从海量的数据中及时发现异常情况,并对异常情况进行预警、诊断并发现一些深层次的故障原因,并将故障重新输入训练库中,提高后续故障诊断的准确度和精度,是今后研究的一个重点。
4结束语
本文对故障诊断技术的现状进行了综述。重点介绍了泛应用于航天器的故障检测的基于模型、基于信号处理、基于人工智能的诊断方法。由于航天器系统的复杂性及其运行环境的特殊性,还有很多故障诊断的问题亟待解决,可以将各种方法进行融合,发挥各自的优点,不断用新的方法来探究。
猜你喜欢
国际太空(2022年7期)2022-08-16
国际太空(2019年9期)2019-10-23
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18
电力与能源(2017年6期)2017-05-14
山东工业技术(2016年23期)2016-12-23
信息通信技术(2015年6期)2015-12-26
电子设计工程(2014年18期)2014-02-27