
改进型滑模观测器的永磁同步电机无传感器控制策略*
2017-02-09 02:42孙方方黄向慧陈珂
防爆电机 2017年1期
孙方方,黄向慧,陈珂
(1西安科技大学电气与控制工程学院,陕西西安710054;2山东中烟工业有限责任公司济南卷烟厂,山东济南250000)
改进型滑模观测器的永磁同步电机无传感器控制策略*
孙方方1,黄向慧1,陈珂2
(1西安科技大学电气与控制工程学院,陕西西安710054;2山东中烟工业有限责任公司济南卷烟厂,山东济南250000)
针对永磁同步电机(PMSM)无传感器系统运行时,传统的滑模观测器系统存在的高频振动问题,用Sigmoid 函数代替开关符号函数构造新的滑模观测器,来改进原有滑模观测器对系统的控制方法进行优化。基于Lyapunov稳定性理论, 保证观测器稳定性。采用锁相环技术计算出转子位置和速度信息,将其反馈到电机控制系统。经过程估算反电动势来推算出转子的速度和位置,使系统达到无传感器控制的目的。仿真结果表明,改进型滑模观测器能够获得更高的估算精度和更好的动态性能。
永磁同步电机;无传感器控制;Sigmoid函数;滑模观测器;仿真
0 引言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)具有结构简单、体积小、质量轻、损耗小、效率高、功率因数高等优点。在工业生产和民用生活中被广泛应用,比如工业上的数控机床机器人、民用上的空调制冷系统、洗衣机的调速系统等。当前,永磁同步电机高性能控制中应用最成熟最广泛的是矢量控制,PMSM矢量控制系统需要获取准确的电机转子位置和速度信息,常用途径是通过安装机械传感器(如光电编码器、旋转变压器等)来获取所需信息,但机械传感器占用空间大、安装复杂、同时还会大大增加成本。因此永磁同步电机无传感器控制技术的发展就显得尤为必要。
无传感器控制技术从1970年被关注,现在主要的研究方法有高频信号注入法[1]、模型参考自适应(MRAS估算法)[2]、扩展卡尔曼滤波器、全阶观测器、滑模观测器(SMO)等。
和其他的方法相比较,滑模观测器有不随温度敏感变化的参数的优势,并且有很强的鲁棒性。然而滑模观测器由于其不连续的控制结构会产生振动问题 。所以传统的SMO需要改进以满足更高精度的需求。
本文在传统滑模观测器的基础上,对改进滑模观测器进行仿真研究,减弱系统高频振动现象。基于电机动力学模型和Lyapunov稳定性定理观测器的稳定性进行验证。最后采用锁相环技术获得电机转子位置和速度信息。经仿真结果验证,与传统滑模观测器相比,改进型观测器削弱了振动、提高了转子位置和速度的估算精度。
1 永磁同步电动机的数学模型
永磁同步电动机的各坐标系及有关矢量图如图1所示。

图1 各坐标系及有关矢量图
永磁同步电机在两相静止坐标系下的数学模型可以描述为
(1)
(2)
式中,iα、iβ、uα、uβ、eα、eβ—α、β两相的定子电流、电压、反电动势;Rs—定子电阻;Ls—定子绕组等效电感;ψf—转子磁链;ωe—转子电角速度;θe—转子位置电角度。由式(2)推导出式(3),即求得永磁同步电机转子位置和速度
(3)
2 永磁同步电机的滑模控制
2.1 传统滑模观测器
PMSM传统滑模观测器的数学模型为
(4)
式(4)减式(1)得到定子电流误差方程
(5)

图2 传统滑模观测器结构图
3 改进滑模观测器
改进滑膜观测器的切换函数为Sigmoid函数,其数学表达式如下
(6)
式中,a—正的斜率系数。不同a时Sigmoid函数的波形如图3所示。

图3 不同a时Sigmoid函数的波形
由式(1)、式(2)得,PMSM改进滑模观测器的数学模型为
(7)
式中,m—反电势的反馈系数;zα、zβ—控制函数,表达式见式(8)。
(8)
改进滑模观测器结构如图4所示。
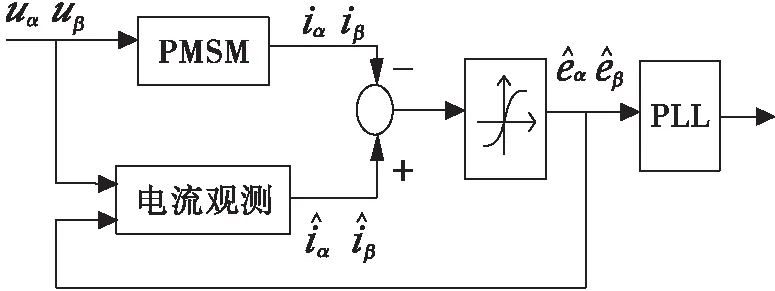
图4 改进滑模观测器结构图
3.1 稳定性的证明
由Lyapunov 稳定性定理,定义函数可以写为
(9)
由式(1)、式(7)可以得到
(10)

=V1+V2
(11)
(13)
所以,改进型永磁同步电机的稳定性要求为
(1+m)k>max(|eα|,|eβ|)
(14)
3.2 采用锁相环的转子位置和速度估算
由于传统滑模观测器引入一阶低通滤波器来滤除反电动势中的高频信号,导致估算的反电动势存在大的相位滞后,因此需要对转子位置进行相位补偿。另外,由于式(3)中反正切函数的计算需要反复查表,导致在进行转子位置与速度的估算时,容易产生计算噪声,而且当转子角为±π时,计算的偏差比较大,所以本文采用锁相环(PLL)技术来对电机转子位置与速度估算。PLL原理图如图5所示。

图5 锁相环原理图
锁相环拥有良好的相位跟踪性能,可以省去传统的滑模观测器中的滤波器部分,而永磁同步电机转子位置和速度信息直接由PI调节器计算得到。
4 仿真结果与分析
基于Matlab/Simulink平台建立永磁同步电机数值仿真模型,采用id=0的矢量控制策略,实现永磁同步电机的无传感器控制。仿真时采用阶跃函数进行转速设定,所采用的电机参数为:额定功率PN=400W,额定电压UN=60V,额定电流IN=8.5A,额定转速nN=3000r/min,额定转矩TN=1.27N·m,定子电阻Rs=1.35Ω,定子电感Ls=17mH,转子磁链ψf=0.1286Wb,极对数p=4。
图6为永磁同步电机基于改进型滑模观测器的无传感器控制系统结构框图。

图6 改进型滑模观测器的SMO制系统结构图
当电机空载在运行时,初始转速设定为800r/min,采用传统滑模观测器的仿真结果如图7、图8所示,转速估算误差最大为±60r/min;转速稳定时,估算误差为±20r/min,与给定转速之间误差为±10r/min。

图7 传统滑模观测器的转速估算误差

图8 传统滑模观测器估测转速
当转速设定为800r/min时,采用改进型的滑模观测器的仿真如图9、图10所示,此时,转速估算误差最大为±20r/min;转速稳定时,估算误差为±3r/min,与给定转速之间误差为±1r/min。
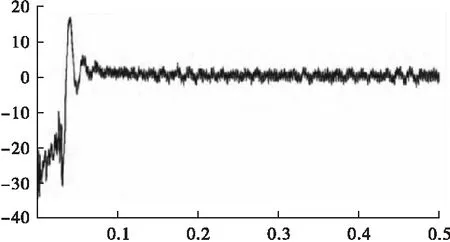
图9 改进型滑模观测器的转速估算误差

图10 改进型滑模观测器估测转速
5 结语
用Sigmoid函数来代替永磁同步电机滑模观测器中的开关函数,并基于Lyapunow理论推导出定子电阻和电感估算方法,及证明其稳定性,并采用锁相环技术获得转子位置与转速的估算值。仿真结果表明,改进型滑模观测器在不增加观测器模型的基础上,能够提高永磁同步电机转子转速的估算精度,有较强的鲁棒性。
[1] 秦峰,贺益康,刘毅,等.两种高频信号注入法的无传感器运行研究[J].中国电机工程学报,2005(05):118-123.
[2] 齐放,邓智泉,仇志坚,等.基于MRAS的永磁同步电机无速度传感器[J].电工技术学报,2007(04):53-58.
[3] 李冉,赵光宙,徐绍娟.基于扩展滑模观测器的永磁同步电动机无传感器控制[J].电工技术学报,2012(03):79-85.
[4] 谷善茂.永磁同步电动机无传感器控制关键技术研究[D].中国矿业大学,2009.
[5]BARAMBONESO,ALKORTAP.Positioncontroloftheinductionmotorusinganadaptiveslidingmodecontrollerandobservers[J].IEEETransactionsonIndustrialElectronics,2014,61(12):6556-6565.
[6]QiaoZhaowei,ShiTingna,WANGYindong,etal.NEWsliding-modeobserverforpositionsensorlesscontrolofpermanentsynchronousmotor[J].IEEETransactionsonIndustrialElectronics,2013,60(2):710-719.
[7] 丁文,梁得亮,罗战强.两级滤波滑模观测器的永磁同步电机无位置传感器控制[J].电机与控制学报,2012(11):1-10.
Sensorless Control Strategy for Permanent Magnet Synchronous Motor of Improved Sliding Mode Observer
SunFangfang,HuangXianghui,andChenKe
(1.College of Electrical and Control Engineering, Xi′an University of Science and Technology, Xi′an 710054, China;2.China Tobacco Shandong Industrial Co., Ltd.,Jinan Cigarette Factory, Ji′nan 250000, China)
For sensorless system of permanent magnet synchronous motor (PMSM) during running, the conventional sliding mode observer system exists high-frequency chattering problem. By replacing switching sign function with Sigmoid function, a new sliding mode observer is constructed to improve controlling method of original sliding mode observer. Based on Lyapunov theory, stability of the observer is ensured. The informations of rotor position and speed are calculated by phase-locked loop technology and are fed back to control system of motor. The rotor position and speed are calculated with the estimated back-EMF to achieve sensorless control of the system. The simulation results show that the improved sliding mode observer has higher estimation accuracy and better dynamic performance.
PMSM;sensorless control;Sigmoid function;sliding mode observer;simulation
陕西省教育厅自然科学专项项目(项目编号:14JK1467)
10.3969/J.ISSN.1008-7281.2017.01.01
TM351
A
1008-7281(2017)01-0001-005
孙方方 女 1989年生;西安科技大学研究生院电气工程专业,在读研究生,现从事滑模观测器的永磁同步电机矢量控制研究工作.
2016-08-22
猜你喜欢
一重技术(2021年5期)2022-01-18
防爆电机(2020年6期)2020-12-14
测控技术(2018年4期)2018-11-25
光学精密工程(2016年3期)2016-11-07
电测与仪表(2016年5期)2016-04-22
电测与仪表(2015年9期)2015-04-09
电机与控制应用(2015年2期)2015-03-01
大电机技术(2015年5期)2015-02-27
电测与仪表(2014年13期)2014-04-04
电测与仪表(2014年8期)2014-04-04
