
基于模糊PID的飞思卡尔智能车变速系统设计
2017-02-17 00:53中央民族大学信息工程学院李雨璇白景岚尹先晗
电子世界 2017年2期
中央民族大学信息工程学院 李雨璇 涂 洪 白景岚 瞿 冉 尹先晗
基于模糊PID的飞思卡尔智能车变速系统设计
中央民族大学信息工程学院 李雨璇 涂 洪 白景岚 瞿 冉 尹先晗
设计飞思卡尔智能车的目的是进行竞速,为了使整体的平均速度达到最大,小车在不同的赛道元素中须采用不同的速度:长直道加速、入弯减速、出弯加速等。传统PID控制能够实现速度的控制,但是对于不同的赛道,小车所需要的PID参数可能会发生变化。综上,采用模糊PID进行变速系统设计,以使得小车运行的整体速度达到最快,运行状态达到最佳。
智能小车;模糊控制;PID
飞思卡尔智能车设计是以智能无人汽车为背景,涵盖电子、控制、计算机、传感器等多个学科的创意性设计。飞思卡尔智能车的整个运行系统,包含:赛道信息采集、赛道分析、方向控制、速度控制等模块。本文着重研究其中的速度控制部分。飞思卡尔智能车速度控制系统是一个时变非线性系统,采用传统的PID算法,单一的反馈控制会使系统存在不同程度的超调和震荡现象,在连续弯道尤为严重,严重影响小车的整体运行速度。根据这一现象,引入模糊控制,实时改变PID参数,有效地提高了小车的整体运行速度。
1 传统PID和模糊PID的比较
1.1 传统PID控制
传统PID控制器自出现以来,凭借其结构简单、稳定性好、工作可靠、调整方便等优点成为工业控制主要技术[1]。当被控对象的结构和参数具有一定的不确定性,无法对其建立精确的模型时,采用PID控制技术尤为方便。PID控制原理简单、易于实现,但是其参数整定异常麻烦。对于小车的速度控制系统而言,由于其为时变非线性系统不同时刻需要选用不同的PID参数,采用传统的PID控制器,很难使整个运行过程具有较好的运行效果[2]。
1.2 模糊PID控制
模糊PID控制,即利用模糊逻辑并根据一定的模糊规则对PID的参数进行实时的优化,以克服传统PID参数无法实时调整PID参数的缺点[3]。模糊PID控制包括模糊化,确定模糊规则,解模糊等组成部分。小车通过传感器采集赛道信息,确定当前距赛道中线的偏差E以及当前偏差和上次偏差的变化ec,根据给定的模糊规则进行模糊推理,最后对模糊参数进行解模糊,输出PID控制参数[4]。
2 模糊PID控制器的设计
2.1 模糊PID控制器原理
模糊控制器采用的是典型的双输入单输出模型。模糊PID控制器的输入量为中心偏差E和中心偏差变化率ec,输入量经模糊化与模糊推理之后得到模糊控制器的输出值,将模糊控制器的输出值传入PID控制器,PID控制器根据模糊控制的输出值对自身参数进行调节。本文采用的模糊PID控制器原理如下图所示:
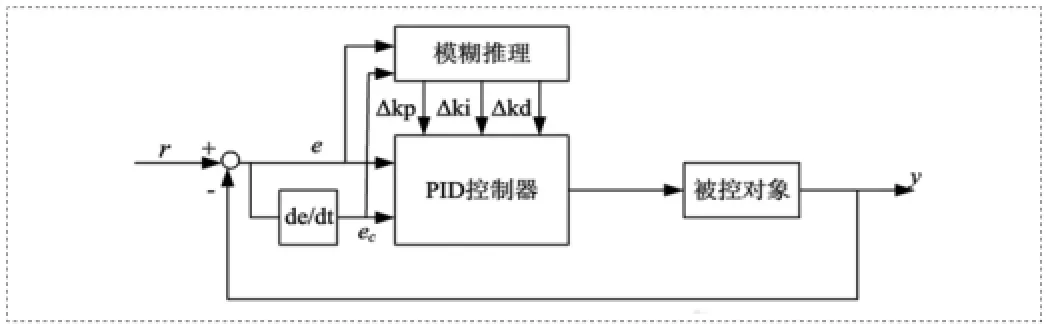
图1 模糊PID控制器结构图
2.2 确定模糊化接口
针对模糊控制器的每个输入空间定义一个语言变量。本文中选用,中心偏差e和中心偏差的变化率ec作为模糊控制器的两个输入。输出量为u。
(1)在中心偏差e上定义语言变量“误差E”,在中心偏差变化率上定义语言变量“误差变化EC”;
(2)定义各个语言变量的论域:
一般来说,E和EC的论域可以选用E = EC = {-5, -4, -3, -2, -1, 0, 1, 2, 3, 4, 5}。本文是基于飞思卡尔光电智能车的,根据小车的特性,将E和EC的论域进行了重新定义,分别为:
E = {-27,-15,-8,0,8,15,27 }
EC = {-7.2,-3,0,3,7.2}
(3)定义各语言变量的语言值:
通常取值可以是:{“负大”,“负中”,“负小”,“零”,“正小”,“正中”,“正大”} = {NL, NM, NS, Z, PS, PM, PL}。针对本文所选用的具体的系统,将其调整为:
E的语言值为:{ NL, NM, NS, Z, PS, PM, PL }
EC的语言值为:{ NL, NS, Z, PS, PL }
(4)各语言值的论域上定义其语言值的隶属度函数。为了实现和处理的方便,E和EC的隶属度函数均选用线性函数。

图2 误差E的隶属度函数
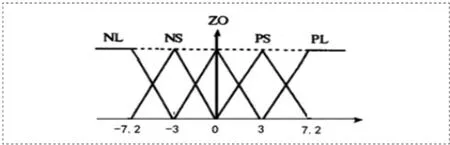
图3 误差变化率EC的隶属度函数
2.3 确定模糊规则表
模糊规则表是模糊控制器中模糊推理的依据,每个模糊规则都需要根据具体的系统进行设计。根据智能车运行特性以及控制经验,设计的规则如下:
2.4 模糊推理以及反模糊化
控制器经模糊化得到各变量的隶属度,再经模糊推理和反模糊化得出控制变量的输出值,达到控制的作用。本文中的模糊推理采用的是最大-最小法,设定e,ec,u的隶属度分别为:µE, µEC, µU。
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15
小猕猴智力画刊(2021年11期)2021-11-28
现代装饰(2020年7期)2020-07-27
马克思主义哲学研究(2020年2期)2020-07-21
运筹与管理(2019年10期)2019-12-17
厦门理工学院学报(2016年1期)2016-12-01
学生天地(2016年10期)2016-04-16
单片机与嵌入式系统应用(2014年9期)2014-03-11
华北水利水电大学学报(自然科学版)(2014年4期)2014-02-27
电子技术应用(2011年10期)2011-04-02
