
四旋翼飞行器嵌入式陀螺仪数据采集设计
2017-03-06 20:55陈新锐
电子技术与软件工程 2016年23期
摘 要
本文以创新开发套件的小型四旋翼飞行器为实际对象,通过对陀螺传感器L3G4200D采集原始数据以及整合三轴加速度计LIS3DH的一段经过测试的配置信息,用于配合运行控制算法和处理从惯性导航系统传输过来的姿态信息。通过多次调试控制算法,进行多次飞行试验,该芯片配置数据可以有效满足稳定飞行数据采集的功能。
【关键词】四旋翼飞行器 STM32F103 陀螺传感器L3G4200D 加速度计LIS3DH
1 引言
四旋翼飞行器是一种能够实现垂直的起降,并在空中可以随时通过调整飞行姿态来改变飞行方位的飞行器。四旋翼飞行器利用旋翼转向在前后与左右的反相,来抵消反扭力矩,从而保持机体的平衡。在现实应用中,由于小型多旋翼飞行器具有其它飞行器所无法比拟的优势,因此其在现代社会诸多领域得到广泛应用,包括摄影航拍、电网线路巡检、环境保护监测、农林施肥作业等。
目前四旋翼飞行器主要分为遥控器进行的遥控型和自主控制的自主飞控型两种。针对四旋翼飞行器控制技术的主要集中在两大热点研究领域:一个是基于惯性导航的自主控制系统,另外一个是基于视觉飞行的自主控制系统。
2 嵌入式陀螺仪数据采集的实现
为了实现四旋翼飞行器在空中自主、持续飞行,同时可以保证飞行过程中的姿态稳定和平稳飞行。本文采用一套自主开发基于STM32F103主控的飞行控制系统对陀螺传感器L3G4200D采集原始数据部分进行设计,整套控制系统主要分为姿态控制系统、加速度控制系统和高度控制系统,控制系统均搭载在硬件平台上。
2.1 飞控硬件平台总体设计
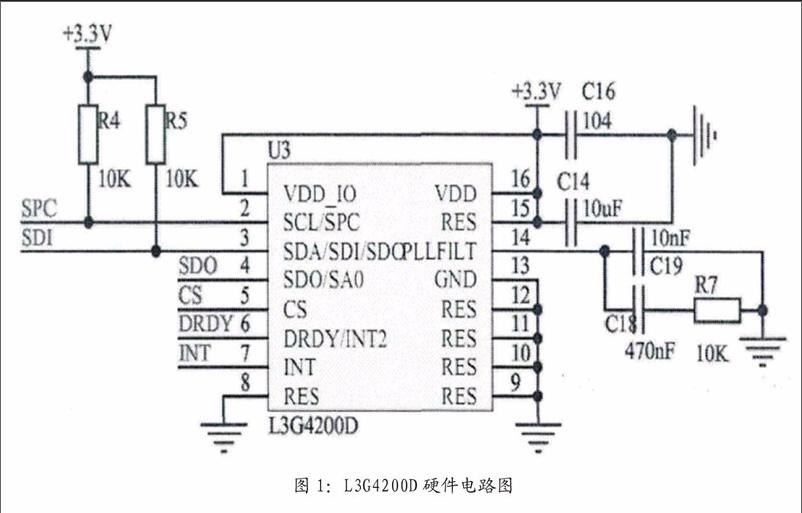
四旋翼飞行器的硬件平台主要分为两大部分,第一部分是惯导平台的电路设计,它是采集飞行器机体的运动状态信息的作为控制系统控制的重要的信息依据。惯导平台的反馈精度直接影响到控制系统的控制精度。第二部分是主控芯片的电路设计。惯导平台本文选取陀螺传感器L3G4200D,它是一种低功率的三轴陀螺传感器,采用专门微细加工工艺制造,通过IC接口技术构成一个CMOS型的专门电路并留有数字接口(I2C/SPI),可以更好地跟传感器元件匹配。陀螺传感L3G4200D器硬件电路图如图1所示。硬件电路设计的重点在于芯片的输入电压及SPI总线的供电电压均为3.3V和陀螺传感器与姿态处理芯片的SPI通信。加速度计选取的是LIS3DH,是一款低功率的三轴加速度计。主控芯片和姿态处理芯片釆用的是STM32F103,进行飞行控制和姿态信息的处理。姿态控制系统采用基于神经网络的PID控制飞行器的姿态角,整个系统采用改进型负反馈结构。
2.2 飞行器系统的软件设计
本文的四旋翼飞行器的软件系统主要完成飞控主板和PC端无线遥控部分的程序设计,软件程序是在集成编译环境Keil MDK-ARM下由C语言编程实现。飞控主板程序设计流程图如图2所示,主要操作包括首先开机对无线模块、L3G4200D、LIS3DH以及PWM电机等进行初始化,再对整个系统的惯性测量单元IMU进行零偏调整,然后设置无线接收模块等待对解锁输入信息的判断,最后如果解锁成功,则对IMU读取出来的简单的加速度、陀螺仪角速度的原始数据作处理得到本系统想要得到姿态角度,从而进行PID电机控制,并通过飞控板上ADC实时获取板上供电电压参数以便于自动返航情况处理。其中L3G4200D初始化及数据采集操作主要有:寄存器配置、数据输出速率配置、工作模式设置、三维坐标轴采集参数设置、高通滤波器使能启动和数据量程设定等。
飞控程序中使用定时器中断的方式对时间进行处理,每0.5ms中断一次,通过对中断标志位的查询结合不同时间的间隔来分别处理优先级不同的任务,每次中断后立即检查无线模块的接收数据,确保飞控主板控制信息的实时性。每2次中断即1ms获取一次IMU单元的原始数据并作滤波处理获得较为准确的系统加速度、角速度的当前数据。每4次中断即2ms测量并计算当前飞控主板的运动姿态,与PC机遥控端的目标姿态一起求取差值再通过PID控制算法对各个电机进行PWM调速控制。每200次中断即100ms,飞控系统由STM32F103的ADC通道采集一次主板供电电压,并把供电电压实时参数返送给PC端。 PC端无线遥控部分的程序功能就是把遥控端的操作动作转化成信号传给飞控主板,并且实时显示PC端当前所执行的控制信息和飞控主板返送的飞行姿态及供电电压参数等信息。
2.3 系统运作过程
使用PC机发送控制指令,发送到机体的飞控板STM32_CONTROL上。飞控板通过接收姿态处理板的运动状态信息和PC机的控制指令进行控制算法的处理,得出控制要求的PWM波。PWM波经过电调的处理产生出占空比符合PWM波的电压信号输入四个电机。根据电压的变化,电机的转速变化引起机体的姿态信息的变化。陀螺仪和加速度计组成的捷联式惯性导航系统, 用计算机把测量信号变换为导航参数,测量机体的姿态信息,陀螺仪测出机体的姿态角速度,加速度计测出机体的线加速度。陀螺仪使用SPI总线传输到姿态处理芯片进行姿态信总的处理得出飞行器的姿态角度和角速度和线加速度传输到STM32F103中。
3 结果分析
本文的系统可以较好的实现四旋翼飞行器嵌入式陀螺仪数据采集,从IMU获取并作滤波算法处理后的L3G4200D、LIS3DH数据准确有效,并完成了四旋翼飞行器飞行姿态的稳定控制以及自动循迹返航。这就为接下来六旋翼或八旋翼等多旋翼飞行器的稳定控制研究奠定了理论和实践基础。
參考文献
[1]Scott D.Hanford.Unmanned Aircraft System Roadmap.2005-2030.Office of the Secretary ofDefense(USA) Reprort.August,2005:1-5.
[2]张春慧.高精度捷联式惯性导航系统算法研究[硕士学位论文].哈尔滨工程大学,2005:23-27.
[3]吴军,鲍其莲,高精度捷联惯导姿态更新优化算法研究[J].电子测量技术,2010,15(13):76-80.
作者简介
陈新锐(1982-),男,广西壮族自治区北海市人。硕士研究生学历。现为北海职业学院讲师。主要研究方向为数字信号处理及嵌入式应用开发。
作者单位
北海职业学院 广西壮族自治区北海市 536000
猜你喜欢
中国特种设备安全(2021年5期)2021-11-06
北京航空航天大学学报(2021年9期)2021-11-02
民用飞机设计与研究(2019年2期)2019-08-05
电子测试(2018年23期)2018-12-29
百科探秘·航空航天(2017年9期)2017-12-31
中国公共安全(2017年7期)2017-10-13
计算机测量与控制(2017年6期)2017-07-01
中国惯性技术学报(2017年1期)2017-06-09
山东工业技术(2016年15期)2016-12-01
光学精密工程(2016年5期)2016-11-07
