
轮式移动机器人研究综述
2017-03-06 21:01张珍珍
电子技术与软件工程 2016年23期
摘 要
伴随着社会的快速发展,机器人被越来越多地应用于当前的生产和生活当中。本文在轮式移动机器人的相关研究基础上,将轮式移动机器人进行了车轮数目的相应归类,并对轮式移动机器人的控制方式和移动机构进行了一定讨论,初步探讨和研究了轮式移动机器人不同類型之间的关系,对不同类型的轮式移动机器人做了性能相关的比较,一定程度上分析了轮式移动机器人研究过程中出现的问题,并对其发展方向做出展望。
【关键词】轮式移动机器人 探讨 研究
移动机器人作为研发较早的机器人之一,主要包括履带式、蛇行式、腿式、跳跃式、轮式和复合式等移动机构,其中较适宜松软地面、穿越障碍、爬楼梯等的机器人即是履带式机器人,这类机器人具有较好的通过性能、附着性能和自复位能力,接地比压较小。然而,履带式机器人有功耗大、速度较慢、转向破坏程度大等缺点。腿式机器人也能够在复杂地形行动,且具备一些特殊的性能,然而这类机器人机构复杂,有较多的结构自由度,从而使得其移动速度慢、较难控制、功耗也较大。跳跃式和蛇行式机器人虽然能在特殊环境、复杂环境、机动性等方面表现出独特的优越性,但同时也存在运动平稳性差、承载能力弱等缺陷。与其他类型的机器人相比较,复合式机器人既能够充分适应特殊或者复杂的环境,也可具备其他类机器人所不具有的特点,比如能够变形等,然而这同时也决定了其结构的复杂性和控制难度非常高的特性。在实际的生产生活过程中,尽管轮式移动机器人的运动稳定性虽然受路况情况影响较大,控制复杂地形中的轨迹较难,但因其承载大、驱动和控制较方便、自重轻、行走速度快、机构简单、工作效率高、机动灵活等多种优点,仍被农业、工业、家庭、空间探测、反恐防爆等领域广泛应用。
1 轮式移动机器人的相关研究
1.1 单轮滚动机器人
从外观上看,单轮滚动机器人只具有一个轮子,主要运动方式为滚动式行走,球形机器人也在单轮滚动机器人的范畴之内。关于单轮滚动机器人的研究应用前景是广阔的:单轮滚动机器人具有水陆两栖的特点,适用于沼泽地和海滩等地,因此可将其用于营救、运输、矿物探测等;单轮滚动机器人的外形纤细,可以在狭窄地方作为监视机器人;单轮滚动机器人运动自如、受地形影响较小的特点,可运用于航天领域。对单轮滚动机器人的研究过程中的主要问题有:建立单轮滚动机器人的动态模型,操纵机构和推动力的参数化和耦合问题;获取位置传感器相关的运动信息的方法;控制静态不稳定和动态稳定的方案。
1.2 双轮移动机器人
双轮移动机器人可分为自行车式和两轮左右对称式两种。
1.2.1 自行车机器人
自行车机器人属于一种智能运输工具,通常具有窄小的车体,结构较简单,运动较灵活,可进行小半径的回转,常被广泛用于森林作业和灾难救援等。然而,由于自行车具有复杂的运动力学特征,纵向布置的两轮本身就具有侧向不稳定性,因此,必须进行侧向控制,其控制问题相对是有些难度的,对于其研究和动力学控制探讨都颇具挑战。研究自行车机器人过程中的主要问题有:建立和分析自行车机器人的运动模型;不同载重下自行车机器人的平衡问题;自行车机器人的有关侧向稳定的控制机理;复杂地面下自行车机器人的适应能力。
1.2.2 两轮左右对称的双轮移动机器人
两轮移动机器人在不加装车体的前提下能够自由灵活转动,如果加装车体则会影响机器人的平衡。两轮移动机器人的灵活性较强,行走上与两足机器人比较相似,行为类似于火箭飞行,在机器人领域中两轮移动机器人的控制系统和理论颇受国内外高度重视,并逐步成为研究热点。
1.3 三轮和四轮移动机器人
三轮和四轮移动机器人是轮式移动机器人中的常见机构,尤其适合行走于平整地面上。目前,有关三轮和四轮移动机器人的研究较多,研究内容主要包括运动规划、机器人结构、跟踪控制、体系结构、定位与导航、交互技术、智能技术等。对这类机器人的研究为多轮和复合式机器人的发展提供了一定的基础,且有利于现代汽车工业的进步和发展。
1.4 复合式移动机器人
充分利用和发挥各类机器人的优势,避免或弥补其中的不足,是研制复合式机器人的必要条件。复合式移动机器人在过沟、爬坡、上下楼梯和越障方面具有很强的优势与能力,且运动稳定性较强,现被普遍用于反恐防爆、复杂地形和空间探测等方面。
3 各种机器人的关系和对比
轮式移动机器人不同类型之间看似没有关系,实际内部是存在一定联系的。例如,单轮滚动机器人的半球轮及运动控制原理就被充分应用在两轮移动机器人的研制中;左右对称的两轮移动机器人又可被安装于三轮或四轮机器人上,作为转向及移动机构。
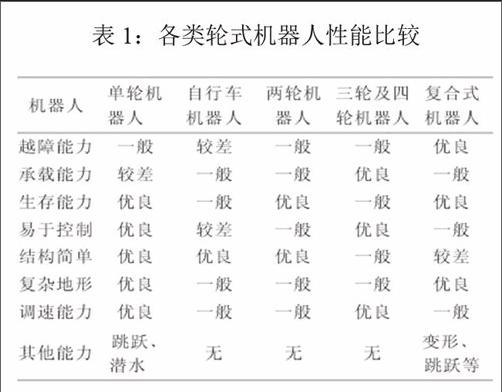
通过对各类轮式移动机器人的性能进行比较,如表1。
4 结论
机器人的行走精度和控制方式是由其构型选择决定的,轮式移动机器人的研制以及新构型的出现,严重影响着轮式移动机器人的路径规划和移动控制。不同类型的轮式移动机器人构建都是以其所在特定的环境为基础的,随着对机器人性能和机器人技术要求的提高,单类型的机器人已经远远不能满足现实的需要,只有充分的考虑机器人的控制精度、工作环境和灵活性等及材料、环保、价格、功效等多个方面,对机器人进行相适应的研究与设计,才能更好地促进机器人领域的发展,满足现代社会的要求。
参考文献
[1]邓宗全,岳明,禹鑫燚,方海涛.球形运动器动力学分析及控制系统设计[J].机器人,2006(06).
[2]尚建忠,罗自荣,张新访,范大鹏.基于构型组合的空间探测机器人移动机构设计[J].机械工程学报,2007(12).
[3]王鹏飞,孙立宁,黄博.地面移动机器人系统的研究现状与关键技术[J].机械设计,2006(07).
作者简介
张珍珍(1987-),女,山西省晋城市人。硕士学历。现为太原学院助教。主要研究方向为计算机应用。
作者单位
太原学院 山西省太原市 030032
猜你喜欢
体育科技文献通报(2022年3期)2022-05-23
天津外国语大学学报(2021年3期)2021-08-13
辽金历史与考古(2021年0期)2021-07-29
科技传播(2019年22期)2020-01-14
民用飞机设计与研究(2019年4期)2019-05-21
汽车工程学报(2017年2期)2017-07-05
启迪与智慧·教育版(2016年8期)2016-10-20
