罗经复示器的航向跟踪方法设计与优化
2017-03-14 11:15樊明波
船电技术 2017年2期
高 杨,樊明波,蔡 君
(镇江船艇学院,江苏镇江212003)
罗经复示器的航向跟踪方法设计与优化
高 杨,樊明波,蔡 君
(镇江船艇学院,江苏镇江212003)
为提高步进电机式罗经复示器跟踪船舶航向的实时性、准确性及稳定性,提出了速率-位置控制及Kalman滤波两种跟踪方法,通过对航向数据的预处理有效提高了航向跟踪的连续性、平滑性。结果表明采用速率-位置控制方法的罗经复示器动态复示效果好,能较好的满足船用要求。
罗经复示器 Kalman滤波 速度-位置控制
0 引言
精确的航向是船舶安全航行的一个重要保证。传统的航海仪器中的航向角位置检测常用自整角机(synchro)、旋转变压器(resolver)完成检测、传输、接收和变换等工作,它们用于船舶导航以来,对船舶的自动操舵航行、雷达天线跟踪等提供精确的航向发挥了重要作用。但是自整角机或旋转变压器使用了大量的机械器件,机械间的啮合不良、摩擦力增加、机械磨损等原因[1],使传递的航向产生偏差,操舵人员需经常与标准罗经航向比对,消除分罗经的误差,不但传向精度低,还存在可靠性较差、故障率高以及检查、调整、消除误差及维护保养繁琐等缺陷。为适应现代船舶设备发展的要求,能接收数字航向的复示器被广泛使用,尤其是表盘式的航向复示器,这类航向复示器跟踪航向与传统的自整角机式分罗经相比存在跟踪航向跳跃性大、运转不平滑等问题。
本文从数字控制器件-步进电机设计的罗经复示器出发,分别通过建立 Kalman滤波模型的方法和速度位置控制的方法分析、处理及复示接收的航向优化复示器动态跟踪效果。
1 系统结构
罗经复示器[2]航向跟踪系统如图1所示,系统包括:模拟数字罗经航向单元,航向信息接收处理单元,航向显示单元。
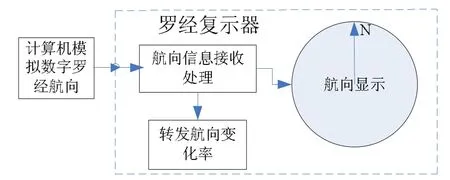
图1 罗经复示器航向跟踪系统结构图
1.1 模拟船舶航向单元
该单元主要完成数字罗经航向输出,采用C++ Builder 6.0软件编写“数字罗经航向输出模拟程序”的小软件(见图 2),只需在软件的航向模拟参数框中设定震荡的幅值、周期、发送格式等相关参数,就可以生成符合NEMA0183(美国电子航海仪器信号标准)格式标准的航向信息,通过RS232C接口发送出来,包含直航向震荡保持、回旋航向等船舶航行常见规律的航向信息。RS232C通信协议为:波特率4800bps,8位数据位,1位停止位,无校验位,ASCII码数据格式。

图2 数字罗经航向输出模拟程序主界面
1.2 航向信息接收处理及航向显示单元
航向信息接收处理单元包括RS232C/TTL电平转换电路、单片机控制电路、零位初始对准电路、步进电机驱动电路等[2],硬件结构见图3。
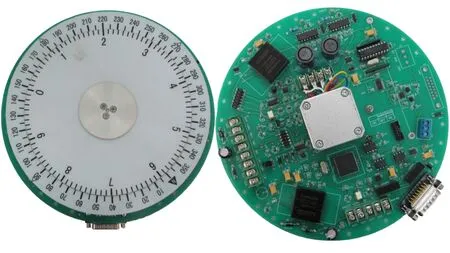
图3 罗经复示器硬件结构图
单片机主控程序是罗经复示器的核心,它实现与上位机的通信,对罗经复示器的运行状态进行控制。主程序采用Keil-C语言编写,程序采用模块化设计,主要由3部分组成:
1)数据通信程序:实现接收及转发PC机生成的航向信号,并发送复示器经计算得到的航向变化率。
2)步进电机控制程序:实现步进电机的转动及方向控制。
3)数字航向信息处理:处理接收的航向信息。
2 数字航向处理算法设计思路
实际船舶航向变化一般符合一定的规律:船舶转向时航向变化是一个连续的过程,保持航向时航向的变化量一般较小且变化也是连续的。但实际数字航向信息却是离散信息,航向信息本身是不连续的,罗经复示器接收到航向信息后,如果对航向信息不做任何处理而简单的将数字航向信息复现出来,复示器处理器因处理不来导致航向的显示将出现严重滞后性,此外实际反映出来的航向也具有较大跳跃性。因此,对接收的航向进行预处理很必要。下面分别介绍速率、位置联合控制方法及基于船舶K-T方程利用Kalman滤波器[3]的方法对航向进行处理。
2.1 速率、位置控制
所用的罗经复示器采用步进电机带动航向码盘转动的方式,脉冲的个数决定步进电机正转或反转相应的角位移[4-8],步进电机的转速与脉冲频率成正比。位置、速率精确控制的实现方法的基本思想:复示器当前显示的航向与接收到的航向之间的差值决定复示器转动的速率及转动方向,而复示器的转动速率由控制程序发送的脉冲频率决定,差值决定脉冲个数:航向差值越大,脉冲频率越高,复示器转动越快;航向差值越小,脉冲频率越低,复示器转动越慢。但是,这种跟踪方式没有考虑复示器的转动趋势,当航向变化率较小时,跟踪的效果不错,但当航向高频震荡时,复示器复示出现严重滞后,滞后的关键问题是复示器的转动速率没有跟上接收航向的变化率。
程序中将航向的历史数据保存起来,通过这些数据计算当前船舶的航行变化率,再结合该变化率估算下一时刻的航向,最后比较当前航向与估计航向的差值。为了保证发送的脉冲频率准确,确保复示器航向变化能跟上接收的航向变化,采取如下措施:运用单片机定时器2模式2自动重装载计数器初始值,定时器的高低8位装载的初始值采用查表法查询预先计算好的的脉冲定时时间间隔;由专用单片机及驱动芯片控制步进电机,专机专事避免主单片机的各种中断影响程序的精确控制。
2.2 Kalman滤波器设计
在船舶航行环境中,将船舶航行看作质点作平面运动,表达式近似为:
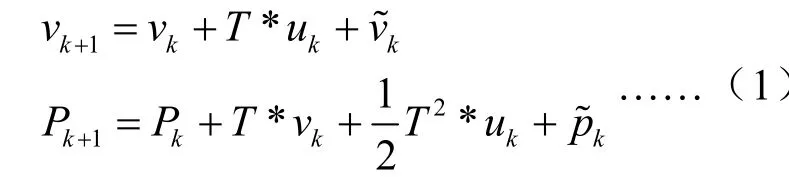
式中:kv为航向变化率,ku为航向加速度,kP为航向。为速度白噪声项,为航向噪声项,T为采样周期。定义滤波器模型的状态向量,则系统可表示为:
船舶航行过程中通常是保持航向状态,忽略船舶的航向加速度 uk,将操舵产生的航向加速度看成噪声,则式(3)可进一步简化为:

对应式(3)的Kalman滤波方程为:
3 试验结果分析
试验分别进行了静态复示试验和动态复示试验,前期试验复示器对固定航向的复示精度,验证电路的可实现性,并进行了通讯协议、极限转速、最低转速等实验,初步证明了该复示器具有较好的静态复示效果。后期航向跟踪主要采用动态模拟跟踪,模拟了航向保持、航向回转等实验,验证复示器动态复示效果。这里给出速度联合控制方案和 Kalman滤波方案在航向保持情况下的跟踪效果。
仿真参数及条件为:船舶航向初始值180°,摆动幅值2度,摆动周期20 s。
从图中可以看出,单纯的位置控制方法,控制方法简单,理论上不考虑延时的话显示的航向与实际接收的航向一致,但航向跟踪的平滑程度较差,航向变化率不能结合当前实际航向的变化趋势,做不到提前控制,这样航向码盘的转动存在抖动现象,延时现象很严重。
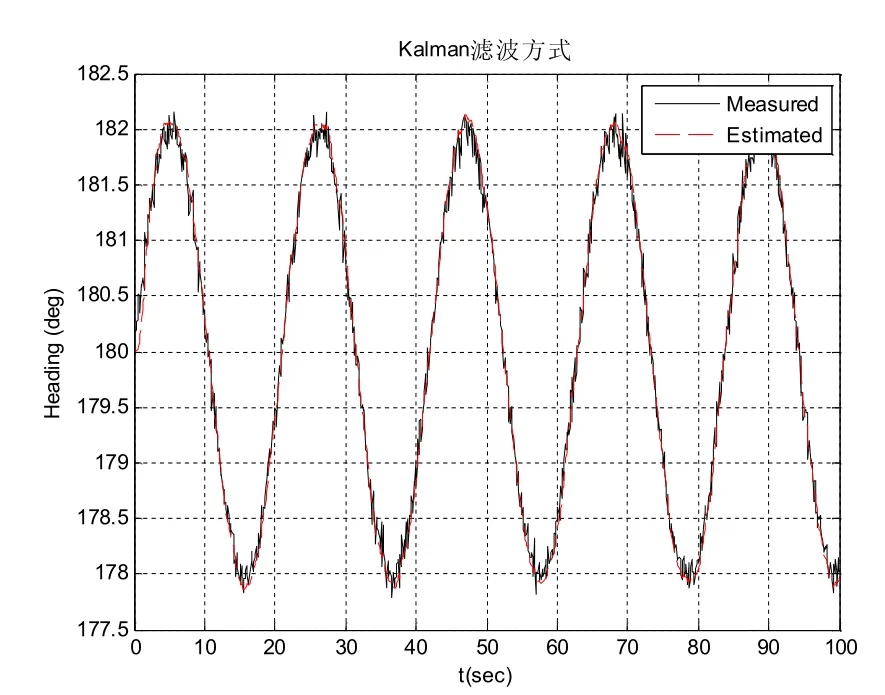
图4 Kalman滤波方案跟踪效果
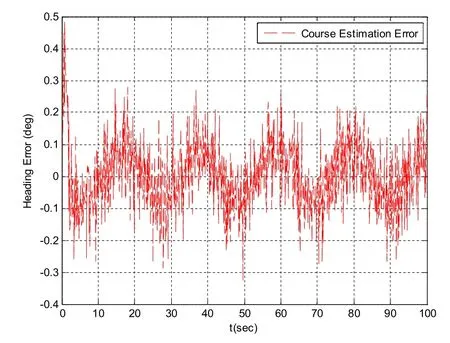
图5 Kalman滤波方案跟踪误差

图6 速度位置跟踪效果
Kalman滤波的方法也存在一点延时的问题,这与航向中没包含舵角信息有关,模型建立不能结合舵角信息(舵角能反映偏航变化的快慢及方向),但Kalman滤波的方法可以滤掉航向中包含的一些较为明显的错误航向,跟踪的平滑度较好(即码盘显示很平滑),基本符合实际航向的变化规律,码盘显示的航向与实际接收航向基本吻合。此外,船舶在实际航行过程中摆动幅值及摆动周期都相对要大一些,实际在跟踪过程中误差可进一步减小。
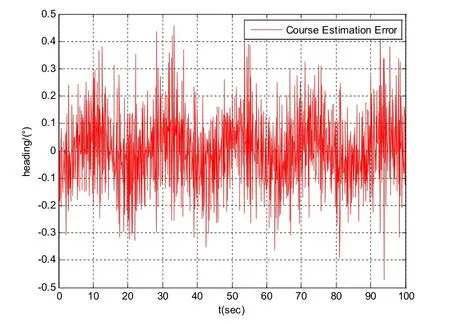
图7 速度位置跟踪误差
速度位置控制的方法避免了单纯位置控制的缺点,加入了与偏航速度有关的控制作用,有一定的预测效果,跟踪效果较位置控制有明显改善,但跟踪的平滑度不及滤波算法,精度也稍差一些。
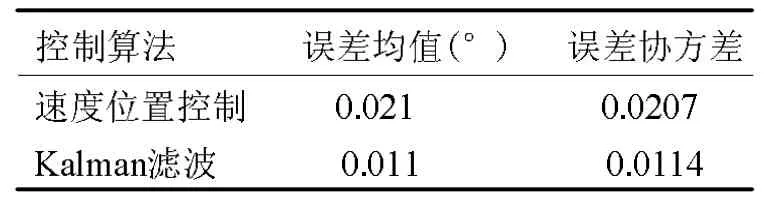
表1 各控制方案的跟踪误差比较
表1给出各控制算法的误差均值及协方差,可以看出 Kalman滤波控制精度更高,但就结合单片机而言,速度位置控制方法的控制算法容易在单片机中实现,且控制精度能满足要求,因此,速度位置控制方法更适用于此罗经复示器。
4 结语
航海仪器采用数字技术是仪器发展的必然趋势[1]。本文介绍了以步进电机式罗经复示器为核心的两种数字航向处理算法,通过仿真实验验证了两种方案的跟踪效果。从试验结果来看,Kalman滤波方案和位置、速度联合控制方案达到了船舶动态航向跟踪的要求,但步进电机还存在低频共振及高频负载能力较弱等问题,还需进一步完善其硬件结构,如加入细分控制电路等。在后续的算法完善过程中,还需通过模拟各种船舶航行规律验证及建立结合船舶舵角的算法。
[1] 寇连坡. 数字技术在陀螺罗经的应用[J]. 青岛远洋船员学院学报, 2006, 2: 48-50.
[2] 高杨, 陈永冰, 周岗. 数字罗经机械复示器的设计与实现[J]. 舰船电子工程, 2010, 12: 186-188.
[3] 张显库, 贾欣乐. 船舶运动控制[M] . 北京: 国防工业出版社, 2006.
[4] 王鸿钰. 步进电机控制技术入门[M] . 上海: 同济大学出版社, 1990.
[5] 刘勇, 李文魁, 陈永冰等, 低能耗船舶航向保持混合灵敏度 H∞控制算法[J]. 武汉理工大学学报, 2010, 6: 95-97.
[6] 彭秀艳, 胡忠辉. 带有海浪滤波器的船舶航向反步自适应输出反馈控制[J]. 控制理论与应用, 2013, 7: 55-58.
[7] 王志文, 彭秀艳. 基于自适应输出反馈的船舶航向控制[J]. 北京理工大学学报, 2011, 31(4): 425-429.
[8] Unar M A , Murray Smith D J . Automatic Steering of Ships Using Neural Networks[J] . Int J of Adaptive Control Signal Processing , 1999, 13 (6): 203-218.
Design and Optimization of the Course Tracking for Compass Repeater
Gao Yang, Fan Mingbo, Cai Jun
(Zhenjiang Watercraft College, Zhenjiang 212003, Jiangsu, China)
In order to improve the stability, accuracy, and real-time property of stepping motor compass repeater, two tracking method of velocity-position control and the kalman filter are proposed. Continuity and smoothness of course tracking can be improved by preprocessing the heading data. The test result shows that the dynamic display effect of the compass repeater with velocity-position tracking control method is good which can satisfy the requirements for ship.
compass repeater; Kalman filter; velocity-position control
TP273.3
A
1003-4862(2017)02-0054-04
2016-10-09
高杨(1987-)男,硕士,讲师。研究方向:导航技术。E-mail:gaoyang441@126.com
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
新世纪智能(高一语文)(2021年3期)2021-07-16
船海工程(2021年1期)2021-03-02
中国船检(2020年10期)2020-11-07
民用飞机设计与研究(2019年4期)2019-05-21
中国惯性技术学报(2017年1期)2017-06-09
中国惯性技术学报(2017年1期)2017-06-09
电子制作(2017年24期)2017-02-02
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05