直接脑控机器人接口技术
2017-03-15 17:43巴成林
电子技术与软件工程 2017年2期
巴成林
摘 要 在现代化科学技术发展带动作用下,作为一种新兴的人-机器人接口技术—直接脑控机器人技术成为了当下机器人控制研究领域的重要研究内容之一。文章首先对脑控机器人接口内容进行了详细的论述,并对BCRI关键技术之一进行了分析,已为今后直接脑控机器人接口技术参考使用。
【关键词】脑控机器人接口 脑-机器接口 脑-计算机接口 人-机器人接口
脑控机器人接口,英文简称BCRI。在过去,直接脑控机器人技术应用只能够对机器人和外设进行一些较为简单的控制,对于连续性、精细化以及复杂的控制还未实现,因此当前直接脑控机器人研究的主要任务就是对机器人控制的连续、精细以及复杂化化研究,以切实提高控制机器人的正确、安全和可靠性等。
1 脑控机器人接口
1.1 BCRI概述
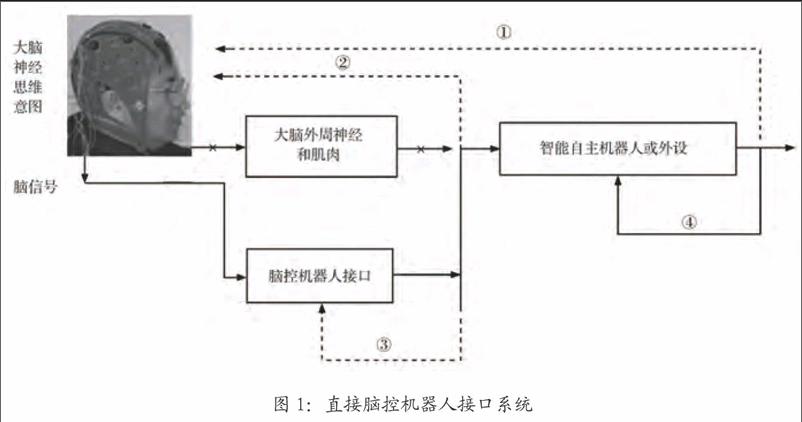
BMI/BCI在应用过程中,其通信和控制的信号源是由思维意图所产生的脑信号,对产生的脑信号进行采集、处理、机器人学习、模式识别等多个途径就可以进一步明确思维意图,从而为控制信号与外部设备之间的直接通信和控制成为现实。在当前科学技术发展背景下,BMI/BCI研究应用范围不再局限在通信领域、脑信号打字和浏览网页等方面,在控制外部设备方面的研究应用价值也越来越突出。直接BCRI就是以BMI/BCI识别思维意图为依托,实现对外部机器人进行控制的应用技术,该技术在应用过程中不需要依赖大脑输出通路,只需要由大脑思维活动产生的脑信号,并通过现代化技术设备的应用实现脑信号直接控制机器人的目的,如图1所示。
事实上,BCRI实现只需要硬件系统及其软件系统结合。如图1中“×”所代表的意思是该信号途径在应用过程中可以舍去,或者是遇到该信号途径应当选择绕过。另外BCRI系统中反馈主要包括以下几种。即最外环反馈、脑控机器人接口输出的控制状态向用户反馈、机器人或者是外部设备本身所形成的智能自动控制、脑控机器人接口所输出的控制状态误差反馈自适应特征等。
1.2 BCRI控制策略
当前有关BCRI控制策略研究主要有两种,即以目标选择为基的控制策略(TSS)和以运动为基的控制策略(MCS)。其中以目标选择为基础的控制策略,用户在使用过程中主要是利用BCRI中BMI/BCI模块功能将粗粒度控制信号向机器人系统的RMCAI模块传输,例如利用该控制策略可以实现机器人去厨房、到冰箱取东西等,因此可以断定这些都隶属于任务级别中的高级指令。而以运动为基础的控制策略,用户在使用过程中也主要是利用BCRI中BMI/BCI模块功能进行控制信号的传输,但是不同的是该控制信号为细粒度控制命令,可以命令机器人向左右移动,隶属于运动参数的低级命令。
2 BCRI关键技术分析
2.1 BMI/BCI模块同RMCA模块适应和融合的必要性
首先,在应用研究中发现,BMI/BCI受到自身技术准确性、速度以及可靠性偏低等因素的影响,技术应用过程中尤其是針对一些速度快、复杂性高的运动序列的反应还比较慢,但是对于机器人而言,在具体应用过程中要求控制的实时性、连续性以及复杂性等精细化控制,特别注重机器人控制中的稳定性,因此仅仅依靠映射思维信号来控制机器人行动效果并不理想。而BMI/BCI指令则会同机器人传感器信号进行融合,可以作为机器人的“导航者”,从这方面分析可以看出,BMI/BCI在脑控机器人中的应用将是直接脑控机器人研究的重点。其次,BMI/BCI与RMCAI应用之间的兼容性较差,因此为了后续的应用两者必须进行一定的适应和融合。对于BMI/BCI而言,其主要功能就是对与用户思维意图有关的脑信号进行解读,清晰用户控制目的,因此该应用输出主要以逻辑控制信号为主,但是对于RMCAI而言,其功能是对用户外周神经等输入的控制目的进行接受,因此该应用输入则主要以语义控制信号为主。
2.2 BMI/BCI模块同RMCA模块适应和融合方法研究
现阶段,BMI/BCI模块同RMCA模块适应和融合方法主要包括BMI/BCI模块与RMCAI模块的协同控制、融合用户图形接口等。首先,受到BMI/BCI应用性能的限制,在进行融合过程中可以通过对智能自主或者是半自主机器人系统协作能力的应用来为用户提供一个高层析的执行控制,已为高级规划的完成创造条件。而对于用户来说只需要在BCRI菜单系统中进行意图以及意外情况处理等的选择,剩余的中间规划以及低层执行则会通过自主导航系统、智能控制系统等来完成,且整个完成过程具有高效性、高可靠性性等方面的特点。其中自主导航系统功能是控制并对机器人或者是机械手等进行位置移动直至到达既定的位置或者是靠近目标操作物体,而移动过程中也会智能化的绕过传感器所探测出的各种障碍。智能控制系统应用则为连续的、精细化控制的实现提供给了可能。另外,现阶段,通过自主导航系统中环境模型生成器的应用可以构建模型静态障碍或者是自由空间,而该生成器在构建模型过程中主要是利用二进制占用网格地图的方法来实现的,同时还可以通过扩展卡尔曼滤波器来实现对机器人周围移动物体的追踪。其次,图形用户接口融合。关于这一目标的实现可以利用BMI/BCI图形用户接口模块中的视觉刺激、运动想象、高级认知提示、听觉刺激、实时虚拟环境模型的目标区域等。
3 结论
综上所述,通过以上对BCRI关键技术分析可知,直接脑控机器人接口技术各方面应用还不成熟,过程中还存在着一些未解的难题,如脑控机器人接口系统性能不高,稳定性也有待改善,基于此,在今后的研究过程中,应当不断的加大对其中关键技术的重视和研究力度,构建BMI/BCI与机器人控制应用研究的平台,创建多学科交叉协作的局面,为我国直接脑控机器人接口技术发展提供强有力的动力。
参考文献
[1]吴正平.基于便携式电信号采集器的脑-机器人交互系统[J].电子测量与仪器学报,2016(05).
[2]刘景泰.面向智能家居/智慧生活的服务机器人技术与系统[J].集成技术,2016(03).
作者单位
香港理工大学 中国香港特别行政区 999077