基于凝胶材料的分布式柔性触觉感知测试电路
2017-03-15 17:46武尚卿苑婷婷刘可何斌
电子技术与软件工程 2017年2期
关键词:柔性
武尚卿+苑婷婷+刘可+何斌


摘 要 本文设计并研制了一种新型柔性分布式触觉感知系统。其基于离子水凝胶为基本材料,建立触觉传感器模型的理论与机理,设计并制作的感知层与定位层,分别可以感知力的大小与方向,由此实现柔性皮肤触觉感知。这种感知系统可用作构建软体机器人,对复杂环境下具有较高的适应性,在救援、军事行动、生物、医疗研究等领域具极强的应用价值。
【关键词】触觉感知 柔性 离子凝胶 软体机器人
1 引言
随着微机电技术特别是微型仿生机器人技术的发展,传统的气缸、电机等刚性驱动器已经不能满足仿生机器人系统高灵活性、高冗余度和高负载/体重比的应用需求,学者们研制出了多种新型活性软质材料,并对其在柔性驱动器方面的应用进行了一系列探索。其难点在于人类触觉感知过程很难被模仿并且制作材料缺乏并且制作工艺有限。
2 凝胶作为感知模型的制备
2.1 感知层制备
感知层分为三部分材料,其中离子凝胶层位于中间,活性炭层覆盖离子凝胶两侧,激流体铝箔覆盖最外层,其中离子凝胶仿生人体皮肤,同时为感知凝胶提供离子电荷,活性炭层用于物理吸附离子液体中的阴阳离子,铝箔导出电荷,同时表面抗折叠按压。如图1所示。
底层离子胶体层文选用的离子液体为1-丁基-3- 甲基咪唑四氟硼酸盐,底层离子凝胶载体材料为N,N-二甲基丙烯酰胺。化学性质比较活泼,因而易于与各种单体发生共聚或均聚反应。如图2所示。
碳极与炭黑是制备电级的材料,其作用在于活性炭是具有极大比表面积及很强吸附,炭黑材料牢固地吸附着一些气态碳氢化合物和其他物质,二者混合物活性物质吸附胶体的离子,因而使胶体形成电压差,可吸附离子电荷,通过60%的分散液聚四氟乙烯(PTFE)形成吸附碳电极。
其制作过程为按比例加取8质量的的活性炭与1质量的炭黑,搅拌均匀,与1质量的PTFE分散液相互混合,形成混合固液,同时加入20质量ml的水与20质量的乙醇,混合搅拌至凝固状态,用玻璃棒反复擀压,形成薄饼状态,厚度约为0.5mm,同时放入120度烘箱中,设置烘烤12小时,制成碳极活性物质层。
集流体可以把碳极材料所吸附的电子导出,并传输至外围电路。裁切集流体金属铝箔与碳极板相同大小两片,同时与碳极活性物质粘连后贴在离子胶体层的两侧制备成可用的离子凝胶感知层。在集流体外围接引导电刷,感知层胶体制备完成。如图4所示。
2.2 定位层制备
定位层由单层离子凝胶构成,由一层可以导电离子凝胶构成,其优点在于低电压条件下,即可完成定位感知功能。
此种胶体主要由丙烯酰胺与氯化锂制成导电胶。丙烯酰胺通常为无色透明片状晶体,分子量其分子结构示意图如下,易溶于水,在酸碱环境中可水解成丙烯酸。LIcl为白色立方结晶或粉末,在基底层提供导电离子。
取14wt%的丙烯酰胺单体溶于水,加入交联剂N,N—亚甲基双丙烯酰胺(MBAA),热引发剂(过硫酸钾,APS)和催化剂(N,N,N′,N′四甲基乙二胺,TEMED),分别以摩尔比0.028mol%,0.031mol%和0.152mol%,溶解于丙烯酰胺溶液中,形成凝胶混合液,取2mol/L的氯化锂溶液份,根据凝胶多少调整用量,混合于丙烯酰胺混合液中,搅拌均匀后,置于长100mm,宽100mm的封闭容器内,其中胶体内四个定点是为胶体定位系统预留空间,50℃静置3个小时候即可成胶。如图5所示。
3 实验电路
3.1 感知层电路
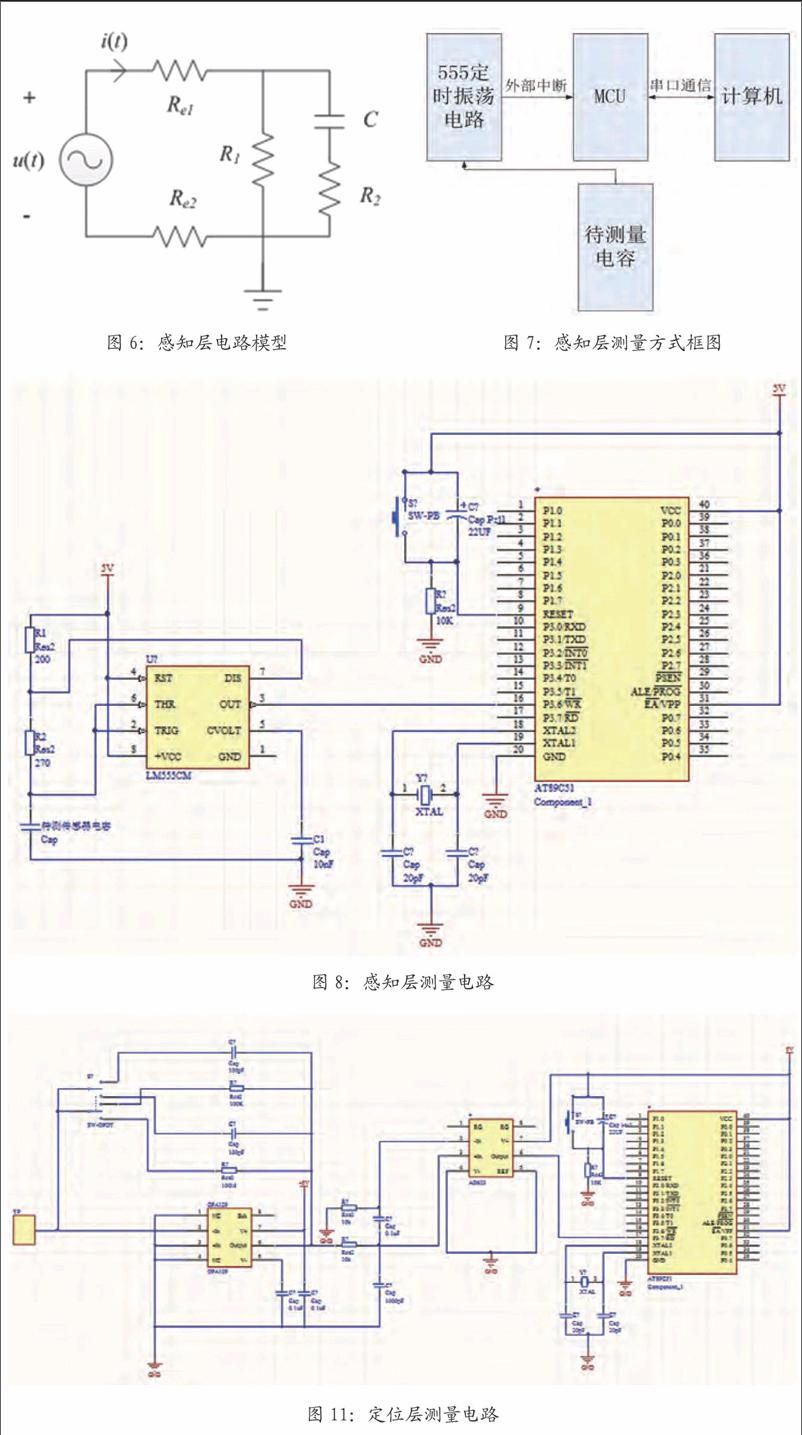
感知层导电可以归纳为离子电流、位移电流、电子电流的综合作用,等效为电容与电阻路混连,其可以等效为RC等效电路模型,当按压力使得感知层发生形变,电容也随即发生改变,由此可以按照测量电容变化,拟合得到力的大小变化。如图6所示。
其中Re1,Re2表示上下两极板电阻,R1表示驱动器活性炭层与离子液体聚合物凝胶层的直流等效总电阻,R2表示表示驱动器动态等效电阻,C表示表示驱动器电容。选用振荡法测电容的充放电时间,硬件选型555振荡发生器,如图7所示。
通过555多谐振荡器与外部电路与待测感知层电容相连,产生定时中断被MCU即51单片机接受,此时该数据产生串口通讯由计算机接受,完成数据读取。
感知层电路选用如图8电路设计。
其计算原理在于
tpl=R2CxIn2
tph=(R1+R2)CxIn2
可推知
Cx=1.44/(R1+2R2)f
其中tpl555振荡器低电平振荡时间,tph为其高电平振荡时间,R1、R2为并联在555两侧的电阻,Cx为待测感知层电容值
由555定时器与外部元件R1、R2与待测电容构成多谐振荡器,触发其引脚tri与thr值,这时电路没有稳态,电路仅通过R1、R2向待测电容Cx充电, 同时Cx接地进行放电,从而使电路产生振荡。根据充放电时间可以算出待测电容值。
3.2 定位层电路
定位层感知功能是通过在固定设置在对角线上等位点的四电极,此四电极并联接入同一电流源,初始值为等电位电路,当手指按压触碰时,形成完整回路,通過定义四个点坐标为(0 0)(0 1)(1 0)(1 1),当触摸不同位置时,四支路电流不同,按电流比例求取该定点位置。如图9所示。
定位层胶体中离子电阻较大,各支路,电路中此时需搭建极微弱电流放大器电路,主要芯片用OPA129芯片,偏置电流低,放大器输入电容小,噪声较小,适合搭载微弱信号放大器。如图10所示。
定位层设计电路图如图11所示。
整个电路放大倍数由opa129与输入端并联电阻有关,Vout=10|R|·Iin,通过MCU读取opa129输出电压,可知其流经该支路的输入电流。
括感知力层与定位层上下结构连接,中间通过VHB胶带固定,有设计的电路部分可以感知力大小与力的方位。由此完成触觉感知测试。
4 总结
随着材料、化学等学科的快速发展,针对微型仿生机器人系统的应用需求,学者们研制出了多种新型活性软质材料,并对其在柔性驱动器方面的应用进行了一系列探索。本文针对柔性材料的特点,设计了分布式柔性触觉感知系统,可感知力的大小与力的位置。在科学与工程领域具有实用意义,非常适合用作仿生柔性体机器人感知功能实现。
参考文献
[1]张跃征.N_N_二甲基丙烯酰胺合成工艺研究[D].天津大学,2007.
[2]Chong-Chan Kim ionic touch panel [J].SCIENCE[J].12 AUGUST 2016 VOL 353 ISSUE 6300.
[3]Xinhua Liu,Tough Nanocomposite Ionogel-based Actuator Exhibits Robust Performance,SCIENTIFIC REPORTS[J],4:6673 DOI:10.1038
[4]李严松.PMMA+ LiClO4 有机薄膜的离子导电性能[J].太阳能学报,2000 vol.21,No.2:181-185.
[5]戴宇.用于人工假肢的分布式柔性电容触觉传感器的设计与制造[D].浙江大学,2013.
作者简介
武尚卿(1991-),男,河南省安阳市人。硕士学历。同济大学电信学院。软体机器人。
作者单位
同济大学电子与信息工程学院 上海市 201800
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
石油沥青(2021年5期)2021-12-02
云南化工(2020年11期)2021-01-14
文化创新比较研究(2020年7期)2021-01-13
公民与法治(2020年10期)2020-07-25
中国公路(2017年10期)2017-07-21
光学精密工程(2016年6期)2016-11-07
衡阳师范学院学报(2016年3期)2016-07-10
现代工业经济和信息化(2016年7期)2016-05-17
新闻传播(2015年5期)2015-07-18