六足壁面机器人稳定性分析
2017-03-15 17:52胡鹤鸣何斌
电子技术与软件工程 2017年2期
关键词:稳定性
胡鹤鸣+何斌
摘 要 本文探讨了在竖直壁面上运行的六足机器人的稳定性问题。在地面运行的六足机器人可以依据ZMP理论判断稳定性状态。在竖直壁面上的机器人重心在支撑面上的投影不复存在,所以从受力平衡和力矩平衡的角度探究壁面六足机器人稳定性问题。
【關键词】六足机器人 壁面机器人 稳定性 受力平衡 力矩平衡
1 引言
随着技术的发展,机器人越来越走入人们的生活。现在市面上的机器人还是以地面机器人为主。地面运动的机器人可以通过ZMP理论判定其稳定性状态。ZMP理论的核心就是判断机器人在支撑面上的重心投影是否落在支撑多边形内部。当位于支撑多边形内部时,就认为机器人是稳定的。但是当机器人工作面换成了竖直壁面时,机器人在支撑面上的重心投影便不复存在,所以需要找到一种新的判定机器人稳定的方法。
2 机器人机构
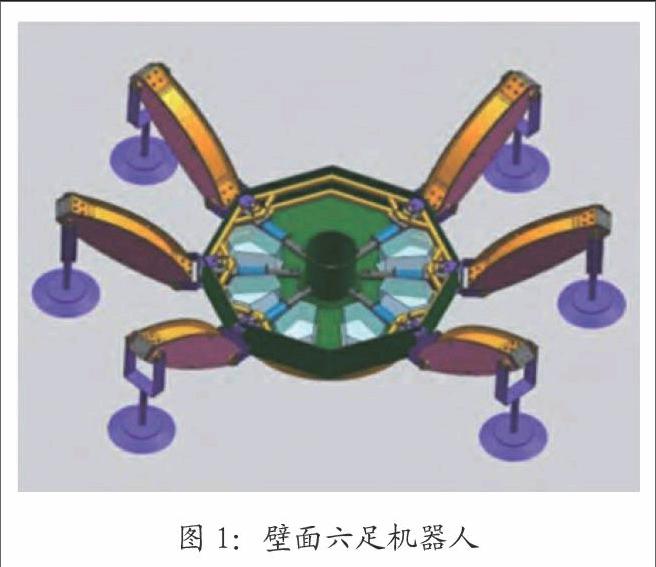
壁面机器人从吸附方式上分主要有如下几种:磁吸附、真空吸附、推力吸附、粘着剂吸附和机械硬接触。从移动方式上分主要有如下几种:轮式、履带式、腿足式、框架式和轮腿式。本文探讨的主要是腿足式真空吸附壁面机器人。机器人机构如图1所示。
3 机器人步态
六足机器人不同的步态本质上就是把不同的行走运动方式分解成为每条腿之间的协调配合运动,进而转化成为每条腿上各个关节电机的转动。六足机器人主要有三足步态、四足步态和五足步态三种。三足步态是机器人最常用的一种步态。三足步态下机器人的运行速度最大,可以获得最高的行走效率,适用于平地无障碍或者小障碍行走的机器人,但是此种步态的承重能力和对复杂地形的适应能力也最差。用三足步态行走时,有三条腿处于支撑状态,另外三条腿处于摆动状态。
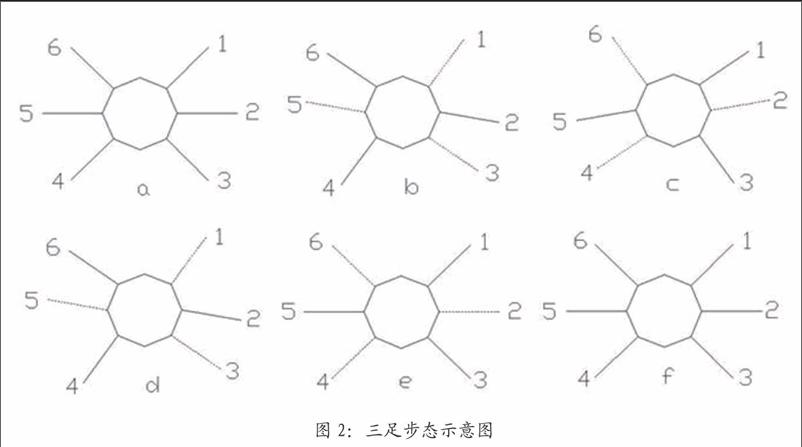
三足步态的具体实现过程如三足步态示意图和三足步态相位图所示。机器人六条腿分成两组,腿1、腿3和腿5为一组;腿2、腿4和腿6为另外一组,每次运动中机器人都有三条腿用处支撑,三条腿用于摆动。
(1)a状态表示三足步态运行的起始状态,此时机器人六条腿全部用于支撑。
(2)b状态中,机器人腿1、腿3和腿5抬起离开壁面并向前迈出半个步长然后落下,腿2、腿4和腿6保持支撑并向后支撑半个步长。
(3)c状态中,机器人腿2、腿4和腿6抬起离开壁面并向前迈出一个步长然后落下,腿1、腿3和腿5保持支撑并向后支撑一个步长。
(4)d状态中,机器人腿1、腿3和腿5抬起离开壁面并向前迈出一个步长然后落下,腿2、腿4和腿6保持支撑并向后支撑一个步长。
(5)e状态中,机器人腿2、腿4和腿6抬起离开壁面并向前迈出半个步长然后落下,腿1、腿3和腿5保持支撑并向后支撑半个步长。
(6)f状态表示三足步态运行的终止状态,此时机器人的六条腿全部用于支撑。
三足步态中,机器人的周期运动分成三个阶段,分别是开始阶段、中间阶段和结束阶段。在开始阶段和结束阶段,机器人每条腿都运动半个步长;在中间阶段机器人每条腿都以步长摆动。机器人长时间以三足步态行走时,每次行走都只有一个开始阶段和一个结束阶段,中间都是对中间阶段运动的不断重复。
4 壁面机器人稳定性分析
爬壁六足机器人在竖直壁面上运行时,由于重力作用,会脱离墙面。通过六个固定在足端的真空吸盘,依靠吸盘内外的压力差被大气压紧紧压在墙面上,吸盘和壁面之间由于摩擦力的作用保持机器人停留在壁面上,不会向下滑落。对于壁面机器人来说,由受力平衡分析和力矩平衡分析可知,主要会产生三种形式的失稳,分别是:纵向倾翻失稳、横向倾翻失稳和滑落失稳。对于三种失稳状态的分析有助于帮助我们选择合适的吸附力,在保持机器人安全、稳定运行的前提下尽可能的降低机器人的能耗,缩短每次的吸附时间。足端吸盘吸附力通过改变真空吸盘配备的真空发生器的流量改变吸盘内部的气压,通过内外压力差的变化进而达到改变吸附力的目的。由前面三足步态的示意图可知,在机器人以三足步态前进时,主要包括a和f所代表的起始状态以及b、c、d、e四种中间状态。如图4所示。
三足步态状态b和状态e中机器人三个支撑足形成的支撑三角形如图5、图6所示。
4.1 纵向倾翻失稳分析
对状态b以24轴作为倾翻轴进行纵向倾翻失稳分析:
对状态e以35轴作为倾翻轴进行纵向倾翻失稳分析:
4.2 横向倾翻失稳分析
对状态b以46轴作为倾翻轴进行横向倾翻失稳分析:
对状态e以13轴作为倾翻轴进行横向倾翻失稳分析可知重力的分量不会产生使机器人在状态e时以13轴发生横向倾翻失稳。
其中:
G:机器人与负载的总重力;
Gh46:重力使得机器人绕46轴横向倾翻的分量;
Fi:足端吸附力且F1=F2=F3=F4=F5=F6=F;
lG:机器人重心到倾翻轴的距离;
li:足端吸盘中心到倾翻轴的距离,i=1,2,3,4,5,6;
h:机器人重心到壁面的距离;
α:壁面的倾斜角。
4.3 滑落失稳分析
对状态b要想保证机器人在壁面上不会滑落需要满足的平衡条件:
4.4 失稳综合分析
把上述三条曲线画在同一个坐标系中可以得到图像如图7。
上图中实线为b状态纵向倾翻失稳临界曲线,与x轴交于72.21°。点线为e状态纵向倾翻失稳临界曲线,与x轴交于68.48°。虚线为b状态横向倾翻失稳临界曲线,与x轴交于88.64°。点划线为三足步态下机器人滑落失稳临界曲线,与x轴交于38.59°。
由于吸重比恒为正数,所以当曲线位于X轴下方时,机器人恒稳定。当在固定角度是只有吸重比位于曲线上或者曲线上方,机器人才能维持稳定。当吸重比值一定时,角度越小表示有更小的稳定性范围。当角度值一定时,吸重比越大表示有更小的稳定裕度。根绝吸重比选择合适的吸附力,可以减少吸附及释放所需要的时间,提高机器人运动效率。当壁面处于竖直状态时,机器人总容易发生滑落失稳,最不容易发生横向倾翻失稳。
参考文献
[1]张春阳,江先志.六足机器人步态规划及其静态稳定性研究[J].成组技术与生产现代化,2016,33(02):40-47.
[2]李根.大型容器爬壁打磨机器人设计与研究[D].浙江工业大学,2014.
[3]李帅.基于并联控制的爬壁机器人的研制[D].重庆大学,2015.
[4]尹晓琳.六足仿生机器人步态规划及其控制策略研究[D].哈尔滨工业大学,2013.
[5]司震鹏,曹西京,姜小放.真空吸附式机械手系统设计[J].包装与食品机械,2009,27(06):26-30.
[6]田兰图.油罐检测爬壁机器人技术及系统研究[D].清华大学,2004.
作者单位
同济大学 上海市 201804
猜你喜欢
山东冶金(2022年3期)2022-07-19
数学物理学报(2021年5期)2021-11-19
数学物理学报(2021年5期)2021-11-19
石油沥青(2021年4期)2021-10-14
矿产勘查(2020年9期)2020-12-25
数学物理学报(2018年5期)2018-11-16
数学物理学报(2018年1期)2018-03-26
厦门理工学院学报(2016年1期)2016-12-01
现代防御技术(2016年1期)2016-06-01
中国合理用药探索(2014年1期)2014-03-11