
基于图像识别的四轴飞行器跟踪设计
2017-03-16 12:59于会泳宋洪亮刘有成胡涛
山东工业技术 2017年3期
于会泳+宋洪亮+刘有成+胡涛

摘 要:本文以STM32F407为主控芯片,设计了基于机器视觉的四轴飞行器。利用加速度、角速度、磁场、温度、气压等参数得到姿态数据,再用PID控制实现稳定飞行。本文例用Meanshift算法,通过相似函数快速识别目标。经过试飞测试,四轴飞行器能够较好识别图像,并能够准确飞行。
关键词:图像识别;Meanshift算法;姿态求解;PID控制
DOI:10.16640/j.cnki.37-1222/t.2017.03.176
0 引言
近几年来,四轴飞行器得到了大力发展,许多成熟的方案已经被广泛应用到航拍领域。随着机器视觉的发展,数字图像的处理应用范围的不断扩展[1],利用机器视觉进行目标追踪已经成为现代研究的热点。本文采用图像识别对目标进行追踪,通过对图像处理,提出特征,将物体特征识别进行定位跟踪。本系统极大的发挥了STM32F407的性能,具有一定的应用领域与商业价值。
1 图像识别
本系统的图像识别处理算法采用Meanshift算法进行目标识别,对采集的图像进行HSL色域空间转换,再用Meanshift算法匹配特征值和进行标记,最终实现对特定区域目标的识别定位。在目标提取时,通过统计中央0.5的区域的HUE直方图来获得,当光线变化时可以自动修改目标锁定值的数据,进行自动参数修改,从而提高了追踪算法的鲁棒性[2,3]。对于图像的采集采用微型摄像头,采集图像后交由后端上位机进行处理与显示在显示屏上。Meaanshift算法是核密度估计法,依靠特征空间中的样本点对其密度函数值进行计算。核密度估计法的原理与直方图法相似,增加了一个核函数用于平滑数据。在充分采样的情况下,可以逐渐收敛于任意的密度函数,因此可以对满足任何分布的数据进行密度估计。
2 四轴飞行器的控制
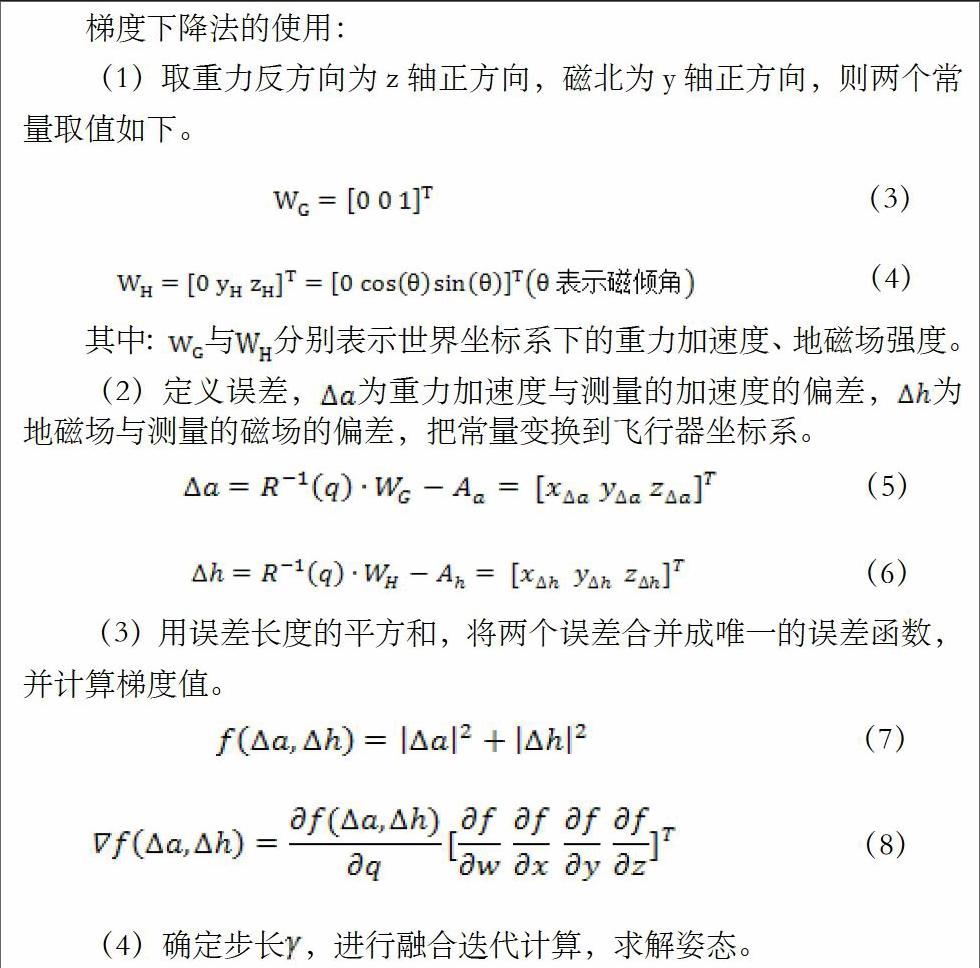
由于四轴飞行器采用多旋翼飞行,各个浆翼之间在旋转过程中存在相互干扰,这就导致飞行器飞行的稳定性较差[4]。在设计控制系统时要着重考虑飞行器的稳定性,这样使得姿态测量在飞行器系统中显得格外重要,利用传感器来对飞行器的运动姿态进行检测,不断反馈当前姿态,确保飞行稳定。对于姿态控制使用多环PID控制,经过限幅和死区控制,准确的融合了四轴飞行器的多个控制量[5]。电机控制部分采用航模电子调速器控制航模无刷电机,其具有信号丢失保护与低电压保护功能,并且能够线性控制电机转速。在姿态解算中,采用梯度下降法融合加速度、角速度和磁场力数据,利用加速度和磁场强度,纠正陀螺仪积分的漂移誤差;能够得到良好的动态响应和静态稳定性,并用四元数矩阵表示飞行器的综合旋转情况。
3 结论
经试飞实验,系统具有良好的稳定性和机动性,控制响应迅速可靠;能够很好地对图像信息进行采集处理,并能实现对特定目标体进行短距离实时追踪。
参考文献:
[1]陈汗青,万艳玲,王国刚.数字图像处理技术研究进展[J].工业控制计算机,2013(01):72-74.
[2]樊冬雪,成怡,金海林,修春波.四轴飞行器视觉导航系统设计[J].电子技术应用,2014(08):140-142+146.
[3]王宇庆,朱明.评价彩色图像质量的四元数矩阵最大奇异值方法[J].光学精密工程,2013(02):469-478.
猜你喜欢
国际商业技术(2022年4期)2022-04-21
科技视界(2019年31期)2019-12-02
数码世界(2019年6期)2019-09-09
中国信息技术教育(2019年2期)2019-01-28
计算机应用(2016年10期)2017-05-12
山东工业技术(2016年23期)2016-12-23
中国信息技术教育(2016年21期)2016-12-05
科学与财富(2016年26期)2016-12-01
企业技术开发·中旬刊(2016年10期)2016-11-12
科技视界(2016年6期)2016-07-12
