
自走式青贮打捆缠膜一体机的设计与试验
2017-03-16 11:09刁培松刁怀龙
农机化研究 2017年12期
张 将,刁培松,刁怀龙,杨 壮
(山东理工大学 农业工程与食品科学学院,山东 淄博 255049)
自走式青贮打捆缠膜一体机的设计与试验
张 将,刁培松,刁怀龙,杨 壮
(山东理工大学 农业工程与食品科学学院,山东 淄博 255049)
针对国内、外秸秆打捆缠膜机械存在的问题,设计了一种集青贮、打捆、缠膜多功能与一体的自走式青贮打捆缠膜一体机。同时,简述了该机械的结构、工作原理和传动系统,分析了该机械的技术特点和主要工作部件的结构设计。为了检验机器的性能,进行了相应的田间试验,结果表明:该机器的各项设计指标均达到了设计要求。
青贮打捆缠膜一体机;自走式;缠膜青贮;智能控制
0 引言
目前,国内的圆捆缠膜一体机大多以小型机为主,机械化、智能化程度低,且需要多人操作,浪费劳动力。国外的圆捆缠膜一体机虽然自动化程度高,但绝大多数是间歇性作业,影响工作效率。本文针对上述存在的问题,设计了一种高效率,高可靠性,工艺简单,集收割、打捆、缠膜于一体的自走式青贮打捆缠膜一体。该机不仅大大减少了作业环节,减少农时,降低了作业成本,还提高青贮饲料质量,实现了青贮饲料的全自动化作业。
1 整机结构及工作原理
1.1 整机结构和技术指标
自走式青贮打捆缠膜一体机将青贮机、打捆机和缠膜机等集成在一起,一次完成玉米秸秆的收割、输送、切碎、打捆及缠膜等作业。自走式青贮打捆缠膜一体机主要由传动系统、青贮割台、驾驶室、行走系统、储料箱、喂入机构、成捆室、缠网机构、缠膜机、液压系统及电气控制系统等组成,结构如图1所示。
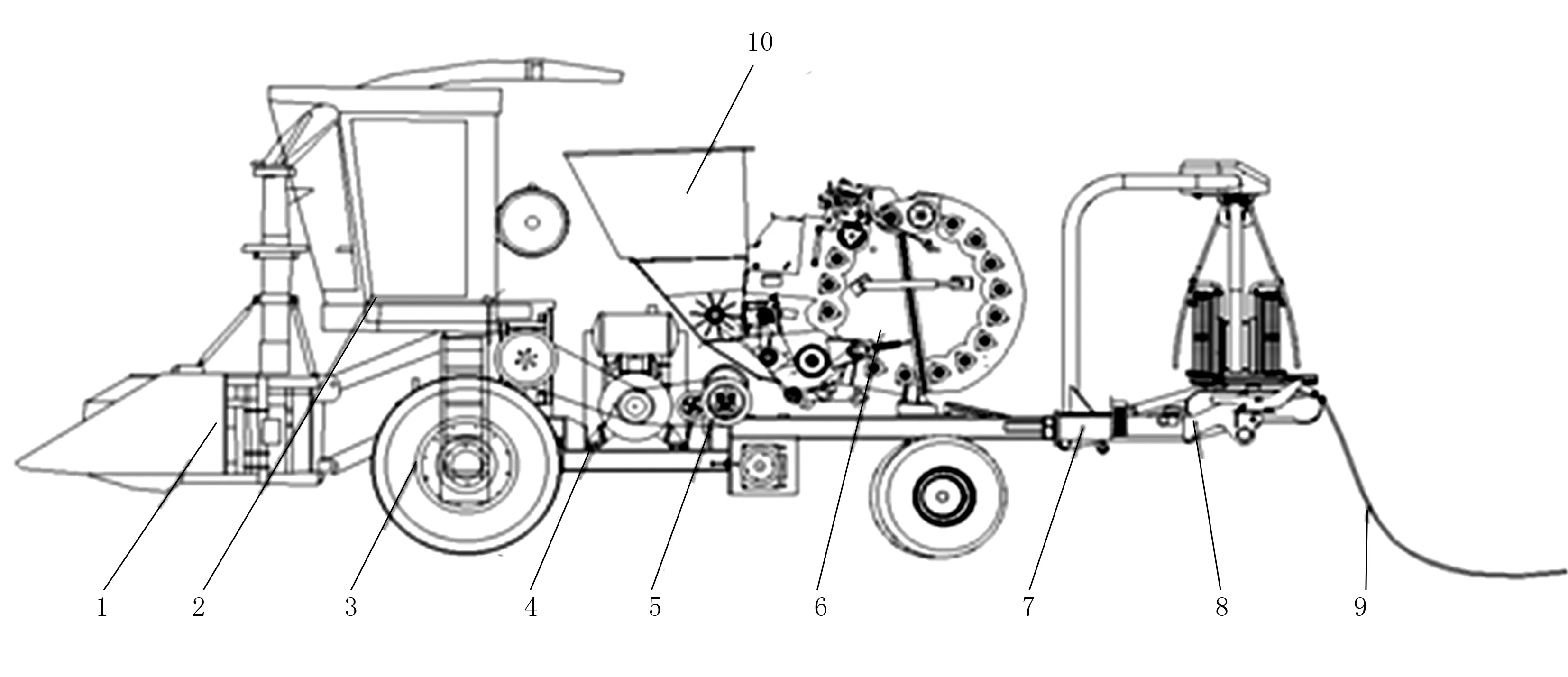
1.青贮割台 2.驾驶室 3.行走轮 4.发动机 5.传动系统 6.打捆装置 7.可编程控制器 8.缠膜装置 9.毡子 10.存储箱图1 整机结构原理图Fig.1 The principle map of the machine’s structure
主要技术指标:作业幅宽为2.2m,适应行距为30~80cm,作业速度为3~6 km/h,生产效率为20~40t/h,茎秆切段长度为7~35mm(可调),损失率为≤3%,留茬高度≤150mm,草捆密度≥150kg/m3;打捆形式为圆形捆,打捆规格为900×1 200mm(直径×长度),单捆缠膜数为2~6层,单捆缠膜效率为40s/2层、55s/3层、70s/4层、100s/6层。
1.2 工作原理
自走式青贮打捆缠膜一体机的工作原理:该机由发动机提供动力,通过传动系统传递到各个工作部件。机器在田间工作时,玉米秸秆由前部立式双喂入盘喂入到圆盘式切碎器中,经圆盘式切碎器切碎后经抛送筒抛送到储料箱内;在储料箱中秸秆经拨叉和喂入机构送入成捆室中,在转动辊筒的作用下逐渐形成圆捆,当圆捆达到设定的压力值时,拨叉和喂入机构停止工作,缠网机构开始启动。缠网作业完成,打捆装置后门自动开启,放出圆捆,圆捆沿倾斜滑道滚到缠膜装置送料架上,触动传感器,传感器将信号传给可编程控制器,送料架液压油缸动作,圆捆被送入到缠膜装置的滚筒上,打捆装置后门关闭,拨叉和喂入机构开始工作;同时,缠膜装置开始包膜,当缠膜层数达到设定值时,切膜刀切膜,包完膜的圆捆通过液压系统卸载到后面的毡子上,顺着毡子滚落到地面上。
1.3 传动系统
传动系统的主要作用是将发动机的动力传递到机器的各个工作部件,传动路线如图2所示。本设计根据机器的特点采用链传动、带传动和液压驱动等多种传动方式组合传动。由于带传动具有缓和载荷冲击和过载保护的特点,所以青贮割台采用带传动,来保证青贮割台工作过程的安全性和稳定性;考虑到链传动具有载荷小、传动效率高的优点,所以打捆机构采用链传动,以保证机器的传导效率和工作效率;根据整机结构特点,考虑到缠膜机离发动机的传动距离较远,所以采用液压马达来提供动力。
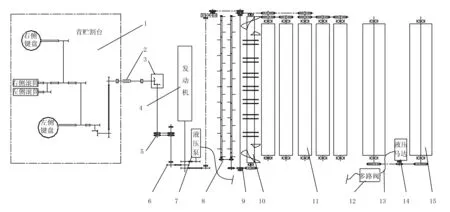
1.青贮割台 2.万向节 3.换向箱 4.发动机 5.过载保护链轮 6.带轮传动 7.液压泵 8.链轮传动 9.电磁离合器 10.喂入机构 11.打捆滚筒 12.多路阀 13.液压传动 14.液压马达 15.缠膜装置图2 整机动力传动路线图Fig.2 The Power transmission roadmap of the machine
1.4 技术特点
本文所述的自走式青贮打捆缠膜一体机集青贮、打捆、缠膜多功能与一体,可一次行完成青贮、打捆及缠膜等作业,提高了工作效率,减轻了车辆对土地的碾压;喂入机构采用整体转子技术和断续螺旋式刀片分布,喂入效果好,减少了喂入时的堵塞;采用螺旋线型成捆室,使辊筒受力更均匀,并提高了圆捆的密度和紧实度;设计了自动控制系统,减少人为操作,减轻劳动力;采用存储箱作为缓冲区,实现连续性作业。
2 主要工作部件
2.1 喂入机构
喂入机构位于成捆室和储料箱之间,是打捆装置的关键部件,主要作用是将粉碎后的秸秆喂入到打捆室中,进而完成后续工作。考虑到螺旋刀片式喂入装置揉切性好,喂入量大,有良好的对中输送作用,故采用断续螺旋刀片式喂入装置。断续螺旋式喂入装置由左右两侧壳体、螺旋中轴、喂入主板、螺旋绞龙、旋转拨板、定刀槽组和喂入链轮等部分组成,如图3所示。它与预紧定刀相结合使用,不仅能够将秸秆运送到打捆室,在运送过程中还能进一步将秸秆切碎。当秸秆较为脆弱时,直接经定刀切割,将秸秆进一步切碎;而当秸秆质地较为坚韧时,秸秆对定刀的压力大于秸秆的预紧力,定刀会退回到定刀槽中,使秸秆顺利进入打捆室完成后续工作过程,如图4所示。
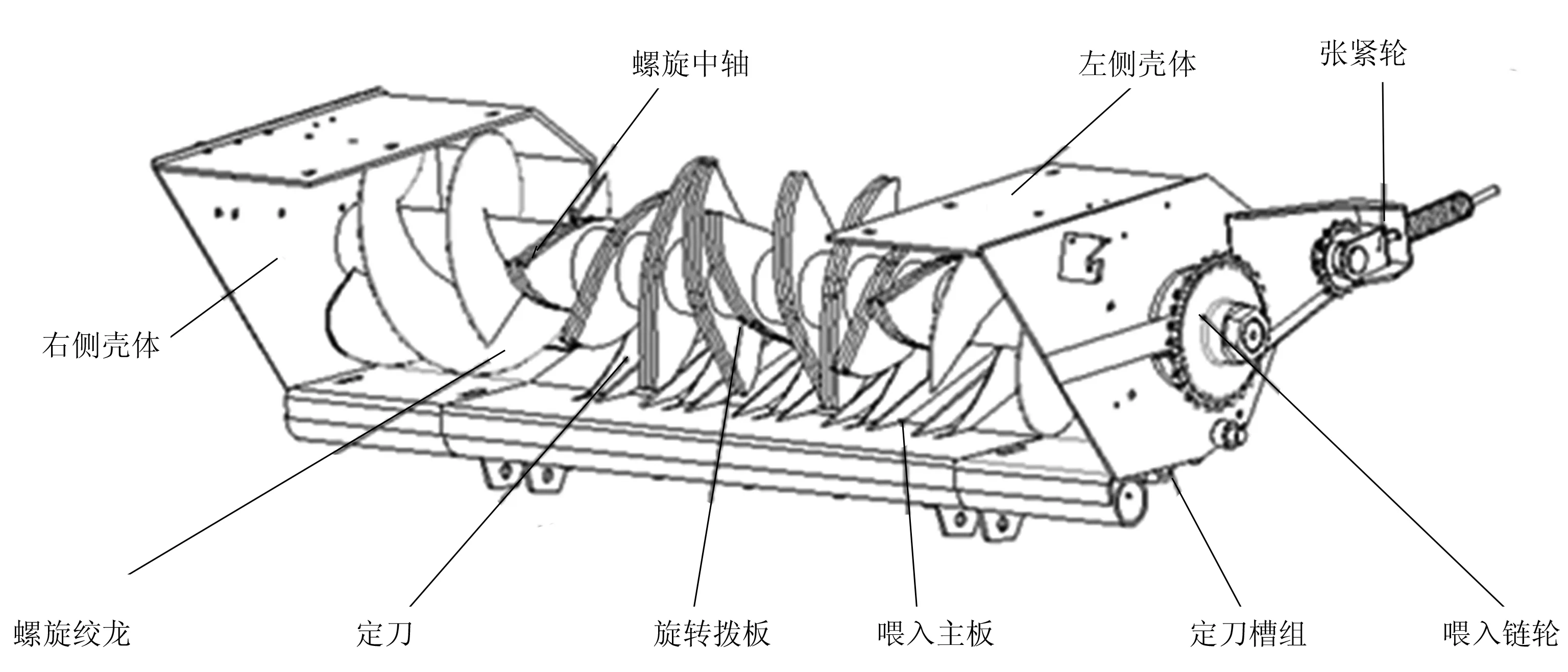
图3 喂入装置总结构简图Fig.3 The Overall Structure Diagram of Feeding Apparatus
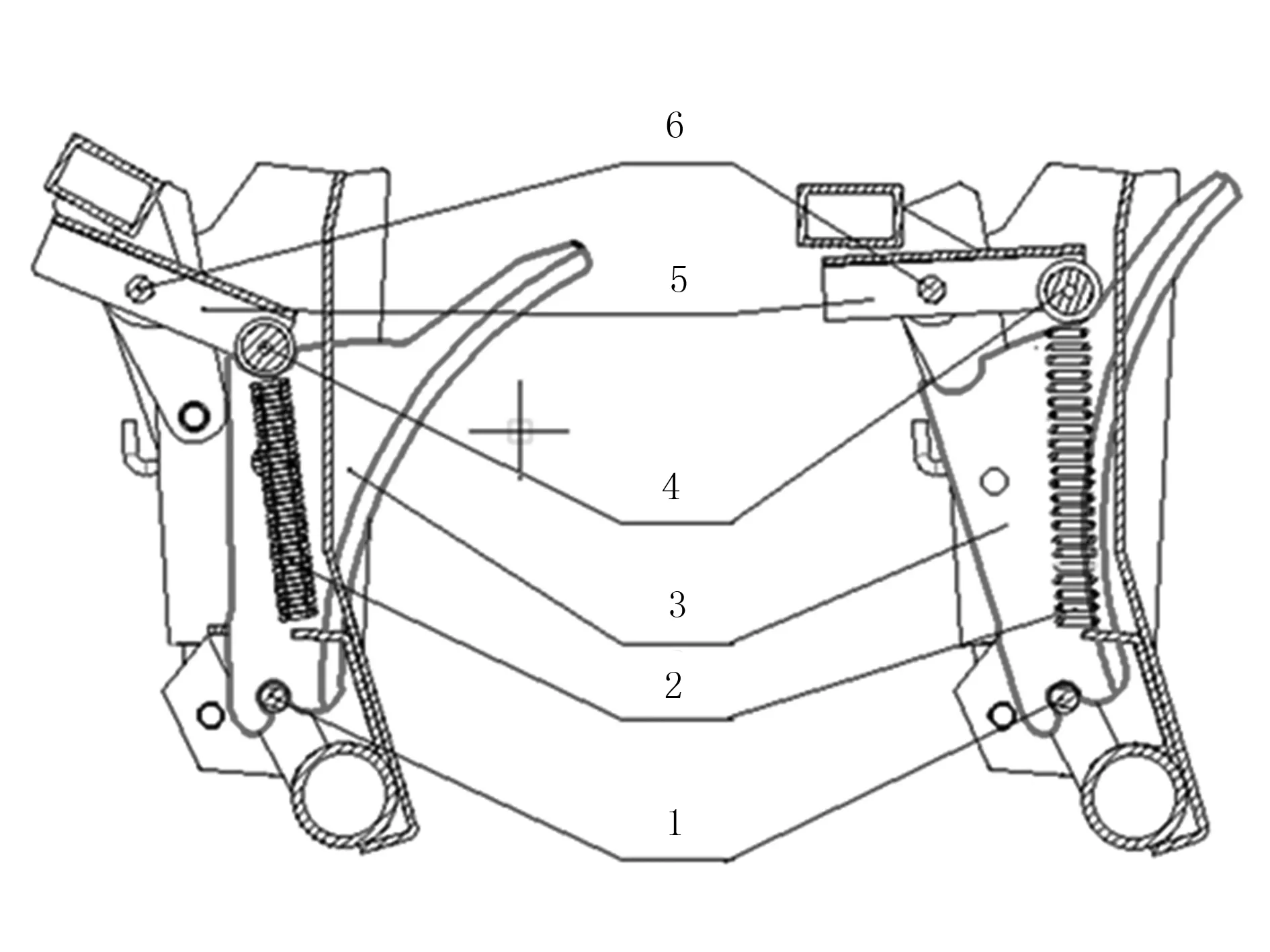
1.前连接杆 2.复位弹簧 3.喂入定刀 4.导轮 5.连接板 6.后连接杆图4 喂入定刀运动状态图Fig.4 The Fed Trance State Diagram Knife Movement
喂入定刀正常工作时,由于复位弹簧的拉力作用,使导轮在喂入定刀的轮槽中,正常工作;当遇到障碍物时,由于障碍物对喂入定刀的压力大于复位弹簧的拉力,喂入定刀绕着前连接杆顺时针转动,导轮带着连接板绕着后连接杆逆时针转动,导轮位于喂入定刀的另一个定刀槽时停止转动。当障碍物通过后,导轮在复位弹簧拉力的作用下恢复到原来的工作位置。
2.2 自动缠网机构
缠网机构是圆形打捆机的核心部件之一,主要包括网室、缠网装置和自动控制系统3部分。网室是用来放置网包的,缠网装置是用来完成引网、送网,继而完成缠网工作。自动控制系统根据传感器采集的信号发出送网、切网等信号完成缠网的自动化作业。自动缠网机构流程图如图5所示。
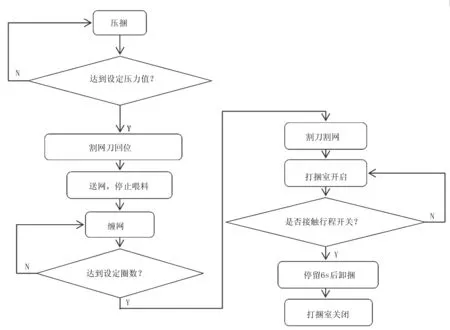
图5 自动缠网机构流程图Fig 5 The Flow chart of Automatic Network
自动缠网机构运行时,PLC控制系统开始工作。随着物料不断地被运入打捆室,草捆体积增大,压力也随之变大。当草捆压力达到一定数值后,信号传递给主控制器,控制器发出指令,电动推杆伸长,推动张紧轮旋转压紧皮带,皮带将打捆辊动力传递给送网辊,送网辊随着打捆辊转动开始送网。在送网进行4s后,主控制器发出指令停止喂料,此时捆草网被草料带入成捆室,并在草捆转动作用下均匀地包裹草捆。送网辊外部连接缠网圈数计数器,当送网辊旋转一定时间达到设定圈数时草捆缠网缠网完成,主控制器发出割网指令,割刀旋转割网。在割刀达到运动中点后,将信息反馈给主控制器,主控制器发出动作指令给打捆室上的液压缸,液压缸伸长打开打捆室后箱体开始卸捆;当打捆室后箱体开启到最大时,连接后箱体与自动缠网装置的连杆到达最长触碰行程开关,割刀在弹簧的拉伸作用下回到原位准备下一个工作过程,在6s的延时后打捆室关闭,各控制器数值恢复原值等待下一个指令。
2.3 成捆室的设计计算
成捆室是圆形打捆机最关键的部件之一。该成捆室由16个钢辊按螺旋式排列成螺线型所围成,其结构特点是增大辊筒与圆捆之间的摩擦力,提高了圆捆的密度和紧实度。相关文献研究得出,螺旋线型成捆室可以提高圆捆的密度20%。
在打捆过程中可以发现:粉碎后的秸秆成为圆捆后主要是在钢辊的静摩擦力的作用下滚动,实现进一步的压实,来提高圆捆的紧实度。因此,钢辊的线速度就近似等于圆捆最外侧的线速度。经过实际测量、计算及查找相关文献,得到了秸秆喂入成捆室的最大速度,即粉碎后的秸秆在成捆室的最小线速度应该与喂入到成捆室的最大线速度相等。由此可以得到
nkmin≡(60vc)/πD)
(1)
nGmin≡nkminD/d
(2)
其中,vc为秸秆进入成捆室的速度;D为成捆室的直径;d为钢辊的直径;nkmin为草捆的最小转速;nGmin为钢辊的最小转速。
由检测得秸秆喂入到成捆室的线速度vc=2.0m/s;经测量成捆室的直径D=1000mm, 钢辊的直径d=195mm。将已知条件带入式(1)中计算得圆捆的最小转速nkmin=38r/min;再将已知条件带入公式(2)中,计算得出钢辊的最小转速nGmin=196r/min。通过查找参考文献,考虑其他影响因素,保障成捆室成捆率和草捆的质量,因此取钢辊的转速nG=200r/min,故钢辊的线速度为
vG=(πdnG)/60
(3)
将已知条件和钢辊的转速nG带入公式(3),得钢辊的线速度VC=2.1m/s。
打捆工作原理:当喂入机构将粉碎后的秸秆送入成捆室中,粉碎后的秸秆将在自动旋转的辊筒的摩擦力下沿螺旋线上升;上升到一定程度由于其重力的作用,粉碎后的秸秆翻滚下来,初步形成草芯;随着秸秆的不断喂入,草芯越滚越大,当大到与螺旋线最里面的辊筒接触时,圆捆开始受到预先挤压,随着圆捆的尺寸的不断变大,圆捆受到的挤压力也越来越大,圆捆的密度就越来越高。
2.4 缠膜装置
缠膜装置主要由机架、抬捆架、缠膜平台、薄膜支撑辊、旋转机构、液压系统和可编程控制系统组成。缠膜装置的液压控制系统如图6所示。

1.公转马达 2.切膜液压缸 3.卸捆液压缸 4.抬捆液压缸 5.多路电磁阀换向阀 6.自转马达图6 缠膜装置液压控制系统Fig.6 The hydraulic control system of Wrap Film Device
缠膜装置的工作过程:圆捆由打捆机后门放出后,经滑道到达抬捆机构,压缩弹簧板,触动光电传感器,传感器将信号传给可编程控制器,然后控制抬捆液压缸伸长,将圆捆翻转到缠膜平台上;随后,公转液压马达驱动薄膜支撑臂旋转,薄膜缠绕在圆捆上;与此同时,自转液压马达驱动缠膜平台的滚筒旋转,圆捆在公转与自转的情况下被薄膜缠绕包裹。在公转轴上端安有传感器,当缠膜层数达到设定值时,切膜液压缸收缩,切膜刀抬起;当膜转到切膜刀处,切膜液压缸伸长,切膜刀闭合,薄膜被切断,2s后卸捆液压缸伸长将圆捆卸下。
3 田间试验
试验样机由山东润源实业有限公司生产,并在公司的试验田里进行了试验,样机如图7所示。

图7 试验样机Fig.7 The Experimental Prototype
试验参照《GB/T 14290 -1993 圆草捆打捆机试验方法》和《GB/T14290-2008 圆草捆打捆机》的相关部分要求进行了性能试验,结果如表1所示。
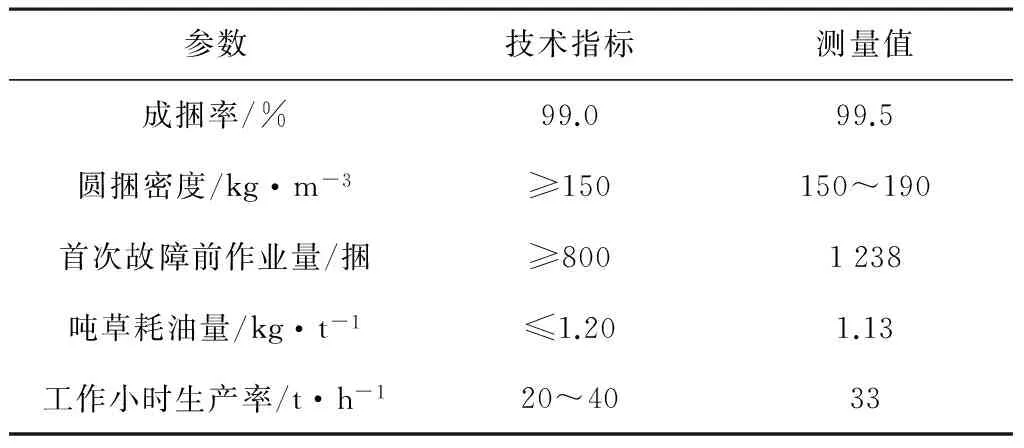
表1 试验结果
由表1数据可以得出:该机的各项性能指标均达到国家标准的规定。
4 结论
自走式多功能青贮打捆缠膜一体机是在研究青贮机、钢辊式圆捆机和缠膜机的基础上研究设计的,能够集青贮、打捆及缠膜等功能于一体,大大地减少了作业环节,提高了青贮饲料质量,节约了工时,降低了作业成本。此外,储料箱设计和自动控制系统设计使其实现了青贮打捆缠膜的连续性和全自动化作业,提高了工作效率。田间试验表明:自走式多功能青贮打捆缠膜一体机的各项设计指标均达到设计要求。
[1] 董妍,常蕊.圆捆缠膜机械国内外研究概况[J].农业工程, 2016(1):19-21.
[2] 高利伟,马林,张卫峰,等.中国作物秸秆养分资源数量估算及其利用状况[J]. 农业工程学报,2009(7):173-179.
[3] 杜韧.小型圆草捆缠膜机的试验与研究[J]. 农业机械,2007(9):82-83.
[4] 王春光,敖恩查.钢辊外卷式圆捆打捆机设计与试验[J]. 农业机械学报,2010(9):103-106.
[5] 高东明,王德成.青饲圆捆机对数螺线式成形装置设计与试验[J].农业机械学报,2015(7):118-122.
Design and Experiment on Self-propelled Silage Baling Tangle Film Machine
Zhang Jiang, Diao Peisong, Diao Huailong, Yang Zhuang
(School of Agricultural Engineering and Food Science, Shan Dong University of Technology, Zibo 255049, China)
In allusion to the deficiency of the Straw bale wrapping film machine at home and abroad, This article designs a kind of self-propelled silage baling tangle film machine with the functions of silage, baling and wrap film, then describes the mechanical structure, working principle and driveline, and analyzes the technical characteristics and the main components’ structure of the machine. In order to test the performance of the machine,we do the relevant test in the field, and the experimental result shows that the various indexes meet the design requirements of the machine.
silage baling tangle film machine; self-propelled; plastic film wrapped silage; intelligent control
2016-09-20
国家重点研发计划项目(2016YFD0701300);山东省农机装备研发创新计划项目(2015YJ102)
张 将(1990-),男,山东枣庄人,硕士研究生,(E-mail)zhjiang1990@163.com。
刁培松(1962-),男,山东烟台人,教授,博士生导师,(E-mail)dps2003@163.com。
S225.8
A
1003-188X(2017)12-0073-05
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
重型机械(2020年2期)2020-07-24
重型机械(2020年2期)2020-07-24
物流技术与应用(2020年4期)2020-05-06
中国自行车(2018年8期)2018-09-26
制造技术与机床(2017年5期)2018-01-19
凿岩机械气动工具(2017年3期)2017-11-22
制造技术与机床(2017年3期)2017-06-23
凿岩机械气动工具(2016年2期)2016-11-11
凿岩机械气动工具(2014年2期)2014-03-01
