
非圆轮系加工番茄果秧分离振动发生器设计及仿真
2017-03-16 11:09朱兴亮袁盼盼张学军李成松王丽红
农机化研究 2017年12期
朱兴亮,袁盼盼,张学军,李成松,王丽红,张 娜
(1.新疆农业大学 机械交通学院,乌鲁木齐 830052;2.石河子大学 机械电气工程学院,新疆 石河子 832000)
非圆轮系加工番茄果秧分离振动发生器设计及仿真
朱兴亮1,袁盼盼1,张学军1,李成松2,王丽红2,张 娜2
(1.新疆农业大学 机械交通学院,乌鲁木齐 830052;2.石河子大学 机械电气工程学院,新疆 石河子 832000)
针对现有加工番茄果秧分离振动发生器易堵塞及振动大等问题,基于非圆齿轮轮系可实现复杂变速变向运动及传动平稳精确等优点,设计了一种非圆轮系加工番茄果秧分离振动发生器,并阐述了其工作原理。建立了非圆轮系振动发生器虚拟样机模型,对比了需求与仿真角位移和角速度曲线,结果表明:需求与仿真曲线吻合度较高,非圆轮系振动发生器可满足加工番茄果秧分离需求。
加工番茄;果秧分离;非圆轮系;振动发生器
0 引言
新疆地处北纬37°~47°之间,是除地中海地区、美国加利福尼亚地区、中国内蒙古地区之外的世界优质加工番茄种植区。近年来,新疆加工番茄种植面积稳步增长,已成为世界第二大加工番茄种植区[1-3],区内番茄制品出口量占到全球贸易总量的1/4[4]。2015年,新疆加工番茄种植面积达6.9万hm2,总产量达761.3万t[5]。机械化采收已经成为新疆加工番茄采收的重要形式[6-8],然而国内加工番茄采收机械主要依靠国外进口,购买及维修价格昂贵,严重阻碍了新疆加工番茄产业的健康发展[6,8]。因此,加工番茄采收机械的国产化是必然趋势。
果秧分离装置作为加工番茄收获机核心工作部件之一,其实现果秧分离的变速变向运动主要依靠振动发生器产生。目前,国内外普遍采用的双偏心块式振动发生器,在采收过程中存在运动参数易受影响及堵塞等诸多问题,严重影响加工番茄果秧分离性能[9]。非圆齿轮行星轮系具有多种类型,可实现各种复杂的变速、变向运动,且齿轮传动具有结构紧凑、传动精确、运行平稳可靠、受到负载变化影响小及冲击载荷相对较小等特点[10-12],已广泛应用于液压马达、水稻插秧机分插机构等领域,可作为果秧分离振动发生器的运动发生机构。
本文利用虚拟样机技术对非圆轮系振动发生器进行了运动学仿真分析,并对比了需求与仿真转角曲线和角速度曲线,以便于分析非圆轮系加工番茄果秧分离振动发生器设计的合理性,为后续机构的优化设计和动力学仿真分析提供理论依据。
1 结构及工作原理
非圆轮系果秧分离振动发生器主要由输入轴、同步带轮、定非圆齿轮、行星非圆齿轮、壳体、系杆轴承座、系杆轴、行星圆齿轮、输入系杆、中心圆齿轮、输出轴、输出连接板、滚针轴承及输出系杆组成,如图1(a)所示。
其中,定非圆齿轮、输入轴分别与壳体、输入系杆固结,行星非圆齿轮、系杆轴和行星圆齿轮三者固结,系杆、轴输出系杆分别与系杆轴承座、输出轴转动连接,如图1(b)所示。行星圆齿轮和中心圆齿轮啮合,行星非圆齿轮和定非圆齿轮啮合,如图2所示。
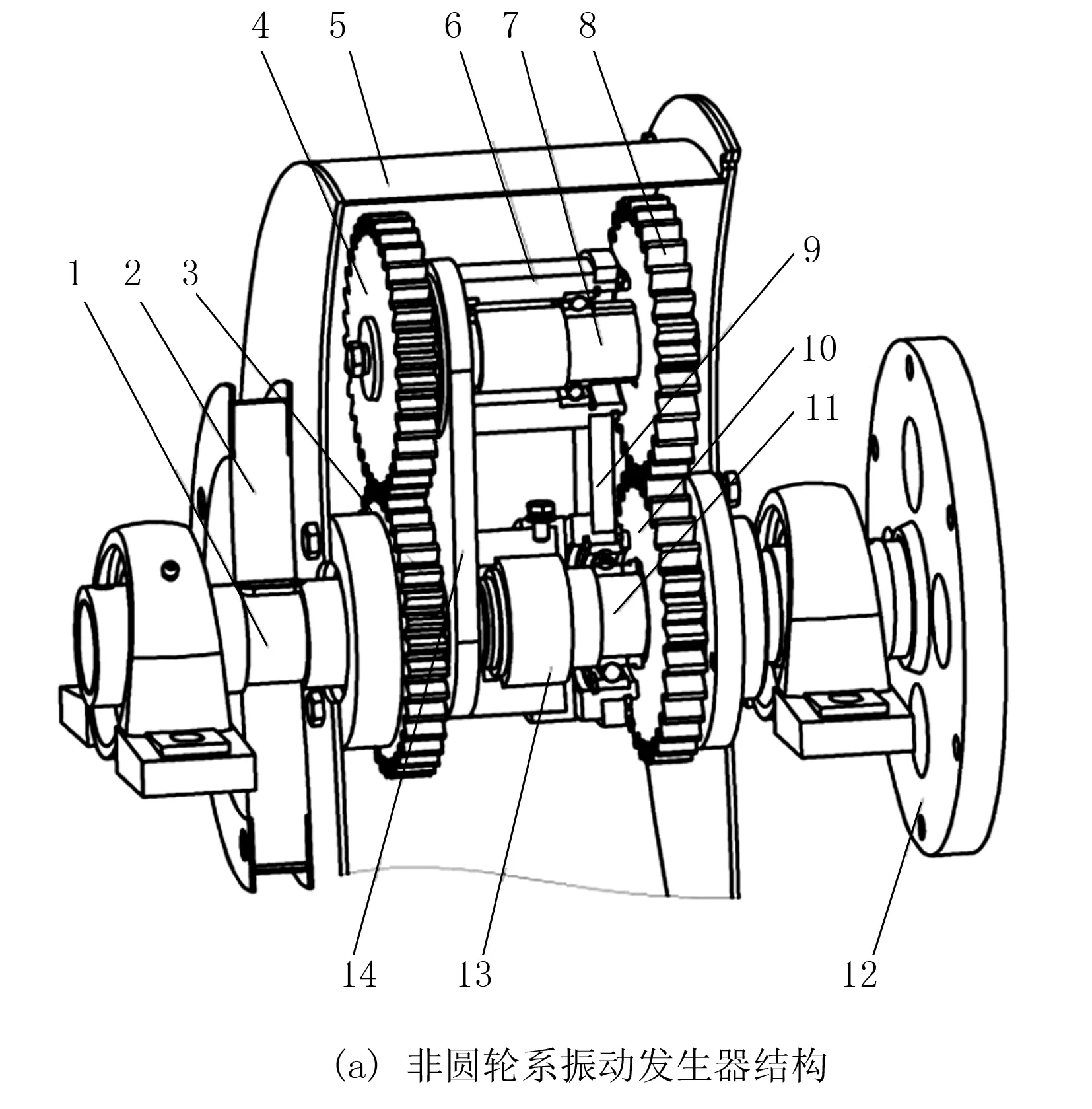
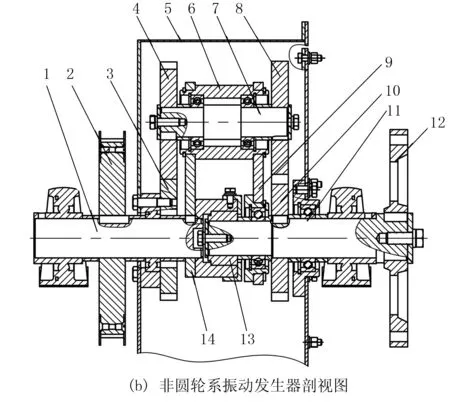
1.输入轴 2.同步带轮 3.定非圆齿轮 4.行星非圆齿轮 5.壳体 6.系杆轴承座 7.系杆轴 8.行星圆齿轮 9.输入系杆 10.中心圆齿轮 11.输出轴 12.输出连接板 13.滚针轴承 14.输出系杆图1 非圆轮系果秧分离振动发生器结构图Fig.1 The structure of non-circular planetary gear vibration generator

图2 定非圆齿轮与行星非圆齿轮啮合图Fig.2 Engagement of non-circular sun gears with planetary gears
振动发生器工作时,电机或液压马达带动同步带轮,驱动输入轴和输入系杆匀速转动,进而带动行星非圆齿轮、系杆轴和行星圆齿轮绕输入轴公转,行星非圆齿轮与定非圆齿轮啮合,实现两非圆齿轮变传动比关系的转换。同时,行星圆齿轮与中心圆齿轮之间啮合,传动两圆齿轮间定传动比关系,从而获取输出轴的变速、变向运动。
2 运动仿真与结果分析
ADAMS软件是由美国MSC公司开发研制的集建模、求解及可视化技术于一体的虚拟样机软件,主要针对机械系统进行仿真分析,可以大大简化机械产品的设计开发过程,大幅度缩短产品的开发周期,获得最优化和创新的设计产品[13]。
2.1 果秧分离装置需求运动学曲线获取与分析
为研究加工番茄果秧分离装置的运动需求,针对现有FS-35型双偏心块式加工番茄果秧分离试验台进行物料试验与分析,在最优因素组合的基础上利用CPL-MS70K高速成像系统获取了其输出轴角位移和角速度曲线[14],如图3所示。

图3 果秧分离装置输出轴角位移和角速度曲线Fig.3 The angular displacement and angular velocity curves of the fruit-seed separating device outputs
对图3中角位移和角速度曲线进行分析,振动发生器输出轴完成一次摆动的时间约为0.18s,非圆轮系振动发生器设计时设定输入轴旋转1周输出轴完成1次摆动,可知非圆轮系振动发生器的输入轴转速约为333r/min。
2.2 振动发生器虚拟样机建立
利用SolidWorks建立振动发生器各零部件三维模型并进行装配,另存为Parasolid(*.x_t)格式并导入ADAMS,导入模型如图4所示。对ADAMS仿真环境和模型物理量单位进行设置,并依据各零部件的具体情况设置材料属性。
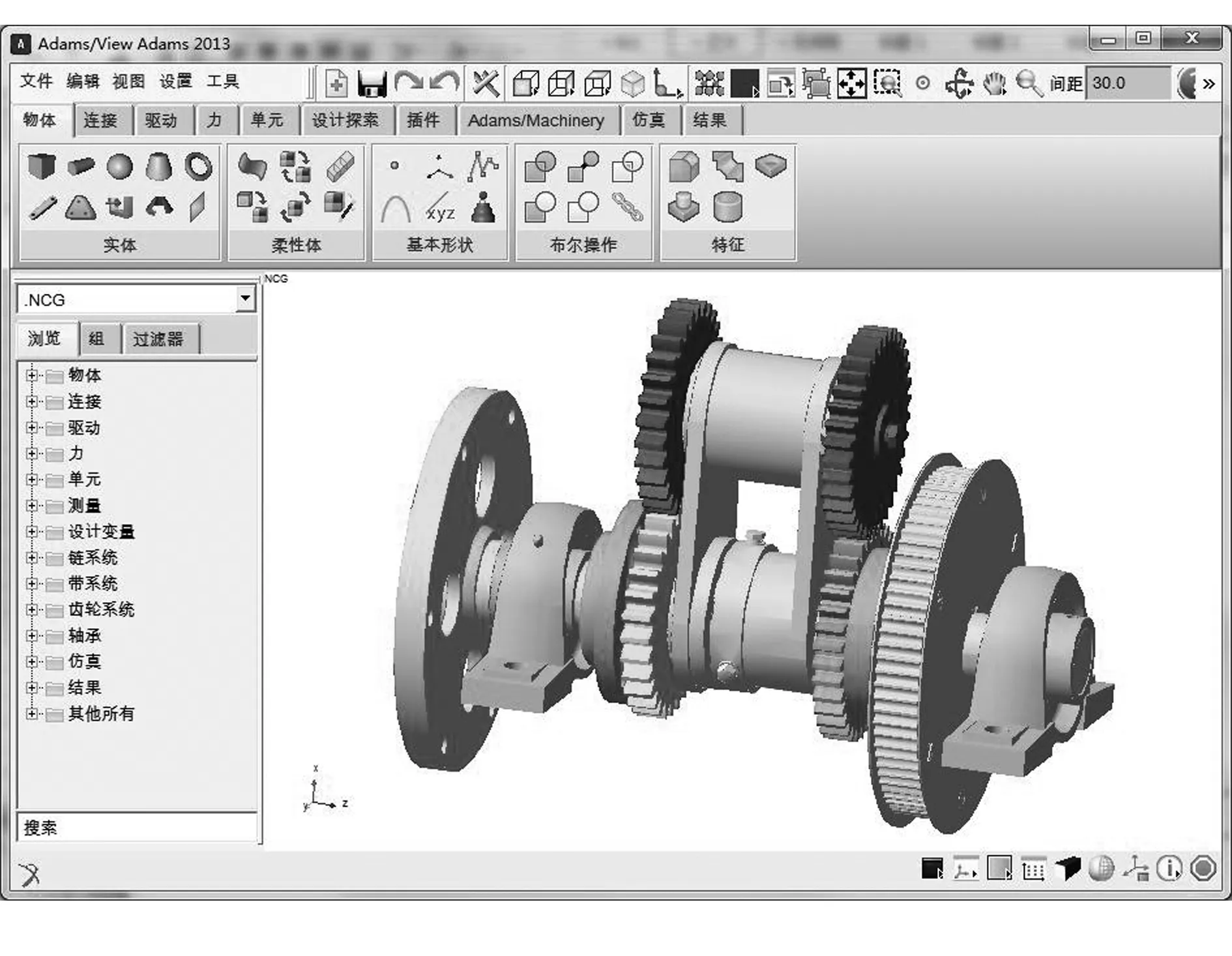
图4 ADAMS中简化后三维模型Fig.4 Simplified 3D model in ADAMS
2.3 施加约束、接触力和运动
ADAMS中未提供非圆齿轮副配合,为确保两非圆齿轮之间运动情况符合实际情况,在两齿轮间施加接触力。依据材料属性,接触力参数为:刚度系数105N/mm,阻尼系数10 N-sec/mm,穿透深度0.1mm,静摩擦因数0.3,动摩擦因数0.1[15]。按照前文所述振动发生器各零部件间运动关系,对相应零部件添加约束和接触力,如表1所示。
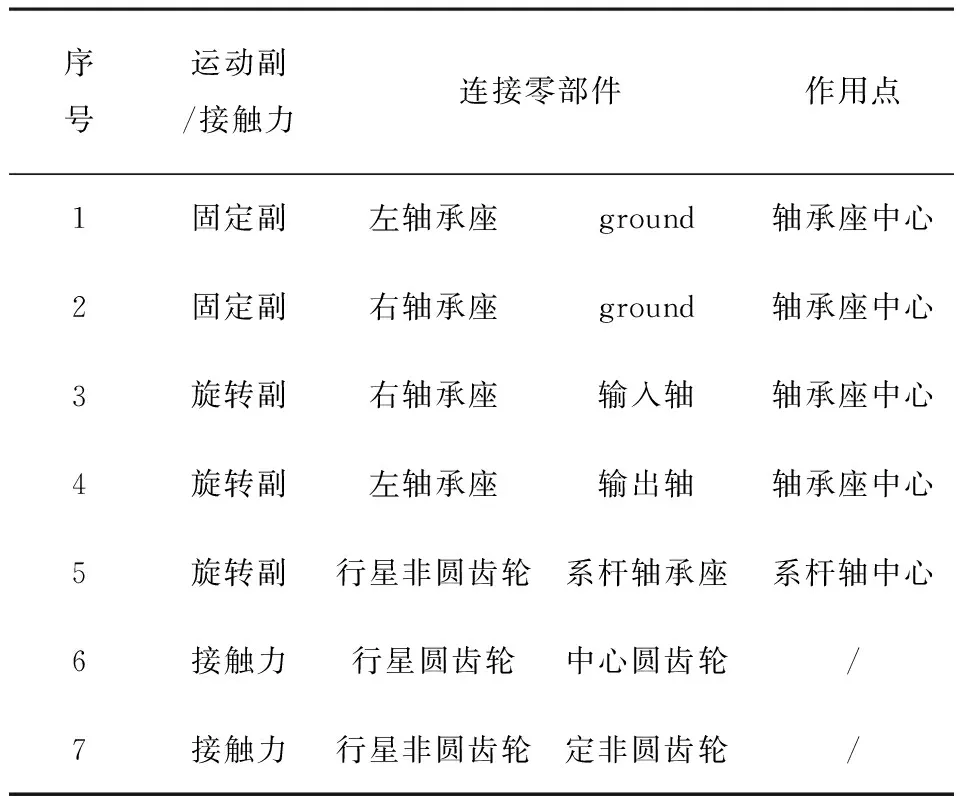
表1 振动发生器施加的运动副及接触力
运动副与接触力添加完成后,按照前文要求在表1中右轴承座与输入轴间形成的旋转副上添加驱动,调整驱动方向为逆时针,并设定转速为333r/min。
对ADAMS中虚拟样机模型进行约束、接触力及驱动加载完成后,仿真模型如图5所示。
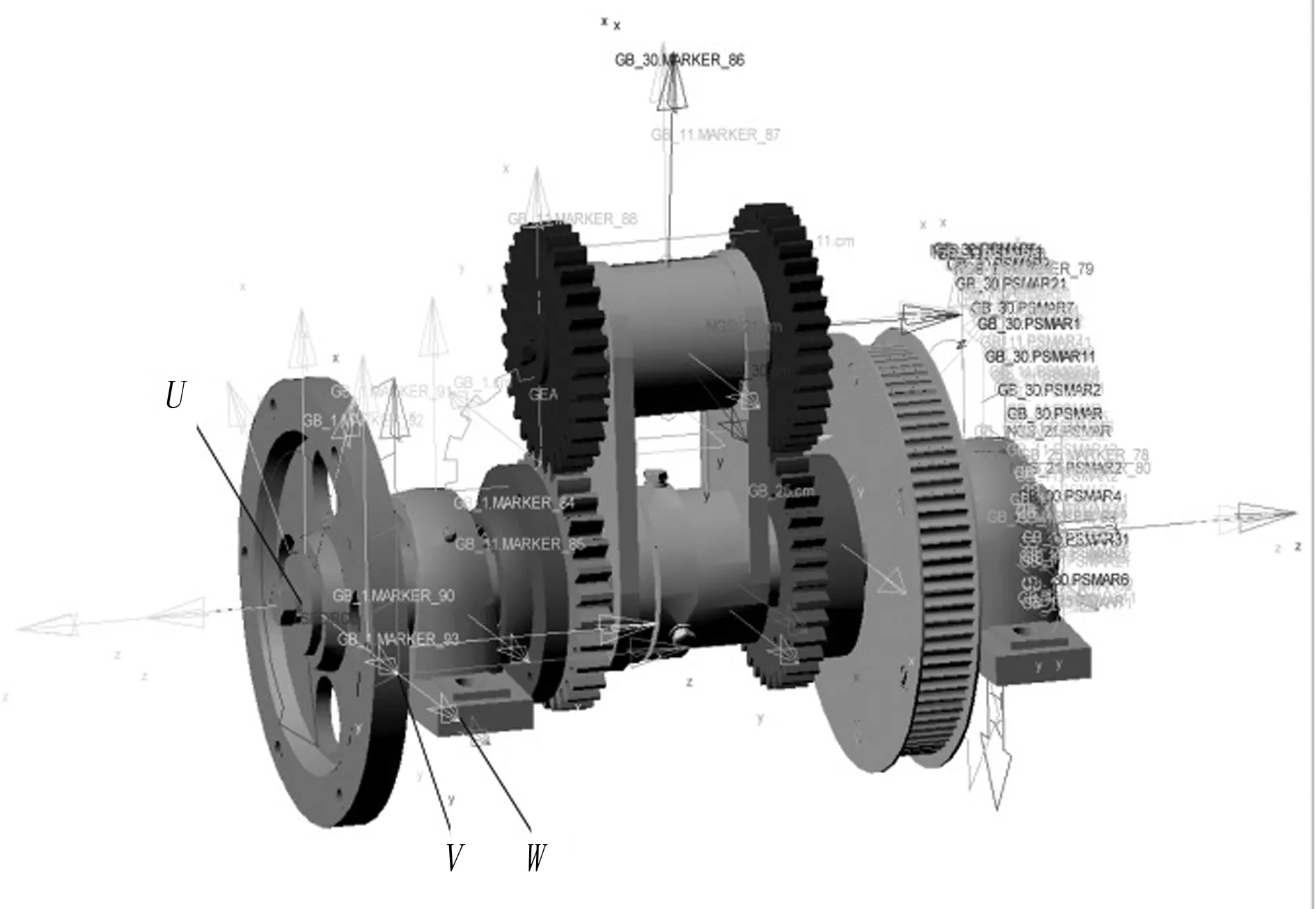
图5 振动发生器ADAMS仿真模型Fig.5 ADAMS simulation model of vibration generator
2.4 仿真结果与分析
正式仿真之前,利用ADAMS中模型自检功能对样机模型进行最后的检验,排除模型设置过程中可能隐含的错误,以保证仿真分析顺利进行。
为获得输出轴相对于地面的角位移、角速度运动曲线,令输出轴的逆时针的角位移为正方向。为方便测定输出轴角位移,在输出轴上创建U点和V点,在大地上创建W点。为保证三者在同一条水平线上,设定三者Y坐标值相等。为了研究的需要,设置仿真时间为0.36 s(即5个周期),仿真步数为720;然后,观察模型运动情况;仿真结束后利用后处理功能获取输出轴角位移和角速度曲线,如图6所示。

图6 输出轴角位移及角速度仿真曲线Fig.6 The angular displacement and angular velocity curves of output shaft
将角位移和角速度曲线数据导出,并与需求曲线进行对比,结果如图7和图8所示。
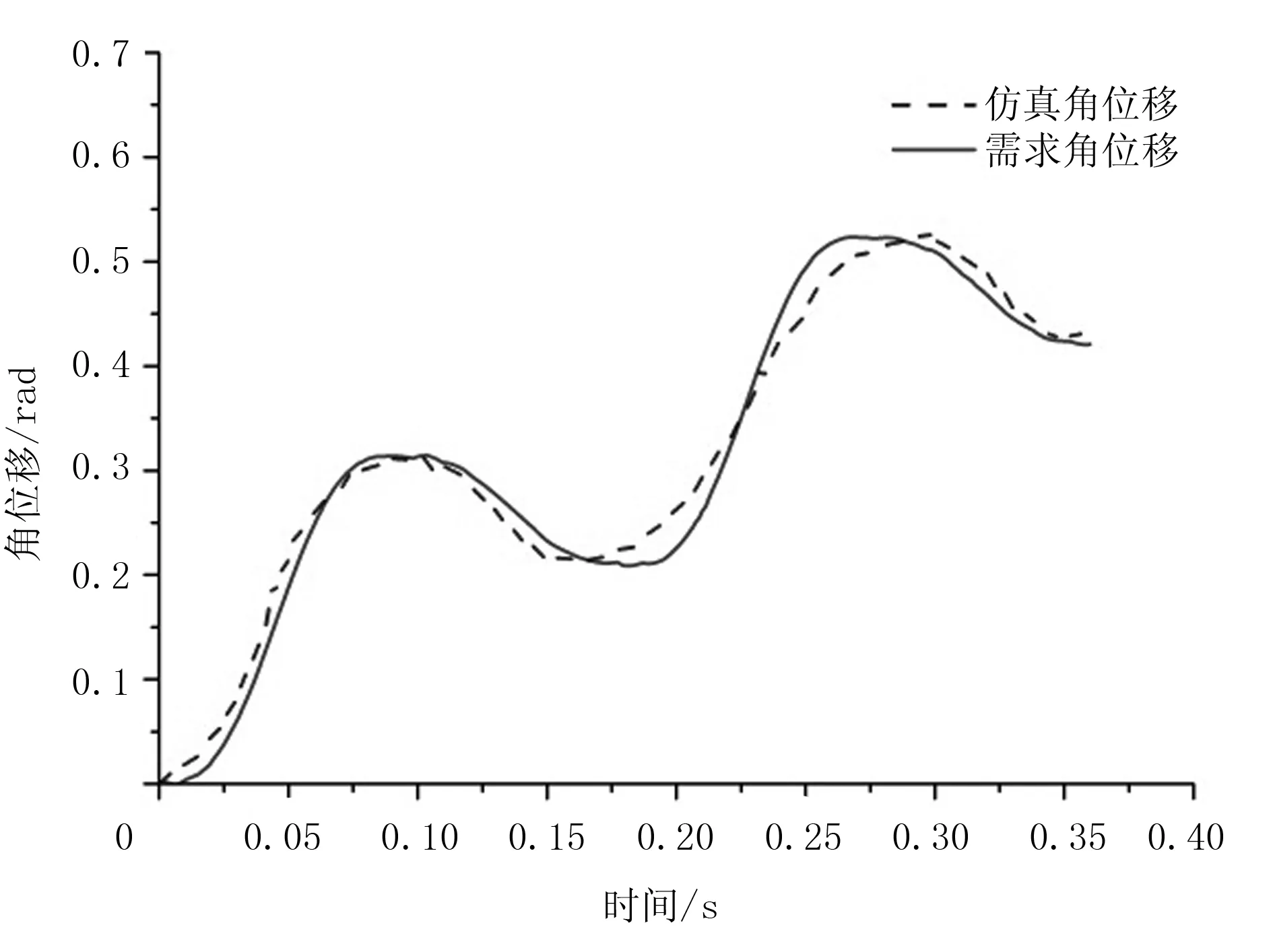
图7 需求与仿真角位移曲线对比图Fig.7 Comparison of demand and simulation angular displacement curve

图8 需求与仿真角速度曲线对比图Fig.8 Comparison of demand and simulation angular velocity curve
观察图7和图8可知:输出轴角位移呈现周期性变化,周期与角位移摆动周期相同,且仿真曲线与需求曲线拟合较好。将需求与仿真曲线关键点数据进行提取并进行对比,如表2所示。
由表2中可知:需求与仿真角位移进程、角位移回程、角速度最大值、角速度最小值和周期差值的差值均比原值差一个数量级,两者曲线之间吻合程度较高。因此,非圆轮系振动发生器能够产生加工番茄果秧分离滚筒所需运动。
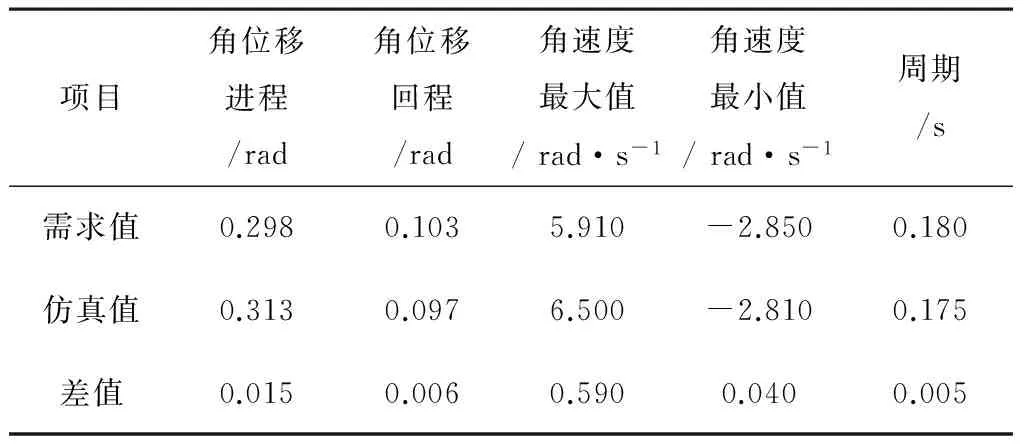
表2 需求、仿真关键数据点及参数
差值=|理论值-仿真值|。
3 结论
针对现有加工番茄果秧分离振动发生器易堵塞及振动大等问题,利用非圆齿轮轮系结构紧凑、传动精确平稳及可实现复杂变速变向运动等优点,设计了一种基于非圆齿轮行星轮系的加工番茄果秧分离振动发生器,并对其进行了仿真分析。
1)确定了非圆轮系加工番茄果秧分离振动发生器总体方案,并对关键零部件进行了设计,阐述了其工作原理。
2)结合现有FS-35型双偏心块式加工番茄果秧分离试验台,获取了果秧分离装置输出轴的角位移和角速度曲线,并分析获取了非圆轮系振动发生器输入轴的角速度为333r/min。
3)建立了非圆轮系加工番茄果秧分离振动发生器虚拟样机模型,并将获取的角位移和角速度曲线与需求曲线进行对比分析。结果表明:需求与仿真的角位移和角速度曲线吻合度较高,非圆轮系振动发生器可满足加工番茄果秧分离需求。
[1] 杨二军. 新疆番茄酱出口市场潜力研究[D].乌鲁木齐:新疆农业大学,2013.
[2] 侯晓静. 新疆加工番茄品质分析及可控性研究[D].乌鲁木齐:新疆大学,2013.
[3] 纵婧. 中国新疆对哈萨克斯坦农产品出口潜力与市场开拓研究[D].乌鲁木齐:新疆财经大学,2014.
[4] 刘益星. 新疆番茄酱出口市场与需要关注的问题[J].对外经贸实务,2015(5):52-54.
[5] 新疆维吾尔自治区统计局. 新疆统计年鉴[M].乌鲁木齐:中国统计出版社,2016.
[6] 张源颖. 新疆加工番茄产业发展面临的问题及对策[J].新疆农垦经济,2011(11):46-49.
[7] 黄志兵. 新疆番茄收获机械化发展的几点思考[J].农机市场,2013(5):23-24.
[8] 李成松,坎杂,谭洪洋,等.4FZ-30型自走式番茄收获机的研制[J].农业工程学报,2012(10):20-26.
[9] 朱兴亮,李成松,坎杂,等.加工番茄果秧分离技术发展现状分析[J].河北科技大学学报,2013(5):399-402.
[10] Φ. П. 李特文.齿轮啮合原理[M]. 卢贤占,译.上海:上海科学技术出版社,1984.
[11] H.E. Golber. Roll curve Gear Trans[J].ASME,1939,61(1):183-191.
[12] 吴序堂,王贵海.非圆齿轮及非匀速传动比[M].北京:机械工业出版社,1997:57-112.
[13] 郭卫东.虚拟样机技术与 ADAMS 应用实例教程[M].北京:北京航空航天大学出版社,2008:2-5.
[14] 朱兴亮,王丽红,坎杂,等.非圆轮系加工番茄果秧分离振动发生器的设计[J]. 江苏农业科学,2016(3):398-401.
[15] 金栋平, 胡海岩. 碰撞振动与控制[M].上海:科学出版社,2005.
Simulation and Analysis of Processing Tomato Fruit Separation Vibration Generator Based on Non-circular Planetary Gear Train
Zhu Xingliang1, Yuan Panpan1, Zhang Xuejun1, Li Chengsong2, Wang Lihong2, Zhang Na2

In order to solve existing problems of processing tomato fruit separation vibration generator clogging, vibration etc., the advantages, complex variable speed and variable motion and smooth and precise transmission, of non-circular planetary gear train was used. The processing tomato fruit separation vibration generator based on non-circular Planetary gear train was designed, and its working principle was elaborated. Virtual prototype model of non - circular gear train vibration generator was established, and the angular displacement and angular velocity curve of demand and simulation was compared. The result shows that Demand and simulation curve of a high degree of consistency, and non-circular gear vibration generator can meet the demands of processing tomato fruit seedling separation.
processing tomato; fruit separation; non-circular planetary gear train; vibration generator
2016-12-29
国家自然科学基金项目(51265046)
朱兴亮(1990- ),男,安徽蚌埠人,助教,硕士,(E-mail)zxl_xjau@163.com。
张学军(1966-),男,四川渠县人,教授,硕士生导师,博士,(E-mail)zhxjau@sina.com。
S225.92
A
1003-188X(2017)12-0094-04
猜你喜欢
四川建筑(2022年2期)2022-06-19
机电信息(2021年17期)2021-07-01
内燃机与配件(2020年22期)2020-09-10
西部交通科技(2020年1期)2020-05-25
铁道建筑技术(2020年11期)2020-05-22
课程教育研究·学法教法研究(2018年14期)2018-08-11
中学生数理化·高一版(2017年3期)2017-07-08
光学仪器(2016年5期)2017-01-12
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21
