
水肥精量配比灌溉系统设计
2017-03-16 11:09张育斌魏正英涂晶洁朱火美
农机化研究 2017年12期
张育斌,魏正英,简 宁,涂晶洁,朱火美
(1.西安交通大学 机械制造系统工程国家重点实验室,西安 710054;2.宁波大红鹰学院,浙江 宁波 315175)
水肥精量配比灌溉系统设计
张育斌1,2,魏正英1,简 宁1,涂晶洁2,朱火美2
(1.西安交通大学 机械制造系统工程国家重点实验室,西安 710054;2.宁波大红鹰学院,浙江 宁波 315175)
精确地控制农业灌溉中的水肥配比,能够很好地促进农作物的生长,大大提高化肥利用率。为此,开发了一套水肥精量配比灌溉系统,采用水路和肥路混合的方法,利用直流调速器控制泵来调节管道中水肥流量,从而实现水肥配比。该系统采用遗传算法优化的模糊PID模型作为控制策略来实现精量配比控制,进一步完善了传统PID的控制性能。实验结果表明:该系统成功实现了水肥精量配比,有效地提高了灌溉精度,具有一定的推广性和应用价值。
灌溉系统;水肥精量配比;遗传算法;模糊PID
0 引言
精量灌溉是近年来发展起来的一种节水灌溉技术,利用该技术不仅能够有效地提高灌溉水的利用率及作物的产量和品质,而且能够充分利用化肥和农药,避免多余化肥和农药污染农田生态环境[1-2]。
实践证明,当肥与水的比例小于3‰时,作物对肥的吸收效果最好,这也是精量灌溉的目标[3]。国内对于精量灌溉控制的研究也有很多,尤其是最近几年,陆续出现了很多新的灌溉技术。江苏大学的戴春霞、赵德安等[4]开发了一套以ARM为核心智能精量灌溉系统,设计了基于ARM920T内核的嵌入式控制系统,并将控制系统引入设施栽培自动灌溉控制中。天津大学李荭娜、许镇琳等[5]设计了一套以单片机为核心、围绕PID控制技术的自动施肥系统,能够自动供给营养液的灌溉控制系统模型,实现了肥液浓度的调控。但是,这些仅仅是单独针对水路或者肥路所进行的调控,并未在水肥配比方向上做相关研究。
本文深入研究了PID控制,建立了遗传算法优化的模糊PID(Fuzzy PID)控制模型,有效解决了不确定、非线性对象的PID参数整定问题,并设计了可以同时完成氮肥、磷肥、钾肥和微量元素四路肥灌溉的系统,成功实现了水肥精量配比,从而大大提高了灌溉效率。
1 总体方案确定
水肥精量灌溉的目标是精确控制灌溉中的水肥比例,选择合适的控制方式和控制策略极为关键。本系统采用新华龙C8051F120单片机作为核心控制工具,根据不同作物的需求,通过检测水的流量来计算所需要的肥量,配合直流调速器对泵的控制来完成水肥的精量配比。该系统采用遗传算法优化的Fuzzy PID模型作为控制策略,对系统需要控制的输出量进行预测,然后根据预测量调整系统的控制参数,从而达到更好的控制效果,总体方案如图1所示。

图1 系统总体框架图
2 水肥精量配比灌溉控制机
2.1 灌溉控制机结构设计
根据灌溉控制机的主要功能,采用水路和肥路两路混合的方法进行设计。系统包含一个主水路和4个肥路,4个支路分为对应氮肥、磷肥、钾肥和微量元素4种肥,水路和肥路配有电磁阀、流量计、泵、压力表及过滤器。电磁阀控制灌溉的启停,完成吸肥的切换;流量计则用于监测管道中的流量情况;微型水泵和直流调速器配合,完成水泵的转速调节,控制吸肥速度和流量;压力表和过滤器等器件用于获取管路压力,防止管路的阻塞。结合精量水肥灌溉控制机的功能要求和机械设计原则,最终设计的控制机三维结构如图2所示。

图2 精量水肥灌溉控制机结构图
2.2 控制硬件系统设计
灌溉控制机控制系统采用新华龙C8051F120单片机作为核心处理器,根据功能需求搭建外围的电路,主要由串口通信电路、流量信号采集电路、继电器控制电路及水泵控制电路4部分构成,同时配合串口触摸屏实现界面显示以及触摸控制。整个系统的硬件结构如图3所示。

图3 硬件电路结构图
3 精量配比灌溉控制策略
3.1 PID控制原理
PID控制器是一种将偏差的比例、微分和积分通过线性组合,实现控制量对被控对象进行控制的系统[6]。控制原理如图4所示。
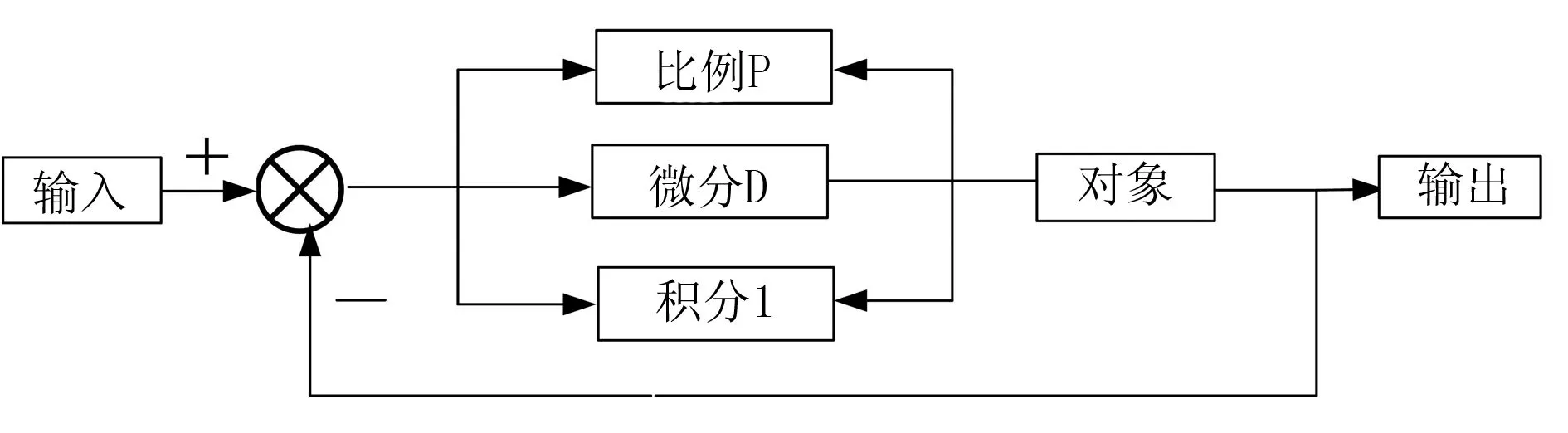
图4 PID控制原理
PID控制器的输入e(t)和输出u(t)关系为
(1)
其中,Kp表示比例系数;Ki代表积分系数;Kd代表微分系数。
PID控制器具有结构简单、良好稳定性及工作可靠等优点[7]。面对非线性、具有较大时变的系统时,其控制器的三大参数Kp、Ki、Kd难以整定,而且一组整定参数远不能满足控制需要。因此,传统PID控制器具有相当大的局限性,需要引入一套新的算法进行改善。
3.2 Fuzzy PID控制模型
1)模糊控制的原理是将测得的系统输入参数按一定规则进行模糊化处理,得到模糊量并输入到模糊推理系统,经过模糊推理和决策,得到系统的模糊输出量,最后将模糊输出量进行去模糊化处理,得到系统的精确输出量,作用到控制对象。
2)模糊PID控制器主要由参数可调的PID控制器和模糊控制系统两大部分组成[8]。模糊控制系统通过对PID的3个可调整参数的修正,完成对系统的控制。控制原理如图5所示。

图5 模糊PID控制原理
PID控制器的3个参数Kp、Ki和Kd与误差e、误差变化率ec存在如下的关系:
1)当|e|较大时,应当通过适当加大Kp、减小Kd和Ki来加快系统的响应速度,同时也避免系统的超调量过大。
2)当|e|处于中等大小时,应当通过适当减小Kp、增大Ki来提高系统的响应速度,减小系统响应的超调。
3)当|e|较小时,应当取适当的Kd,取较大的Kp和Ki,可以使系统继续保持稳定,而且在平衡点也不会出现振荡[9]。
模糊推理系统是将经过模糊化处理的误差e和误差的变化率ec作为模糊系统的输入,把PID的3个整定参数作为模糊系统输出。根据模糊理论,可以定义e、ec、ΔKp、ΔKi、ΔKd的模糊集均为{负大、负小、零、正小、正大},表示为{NB、NS、ZO、PS、PB}[10]。其中,e、ec、ΔKp、ΔKi、ΔKd论域的范围定义为[-3,3]。
三角形隶属函数具有形状简单、计算方便及占用内存小等特点[11]。这里采用三角形作为误差e、误差变化率ec,以及修正参数ΔKp、ΔKi、ΔKd的隶属度函数,如图6所示。
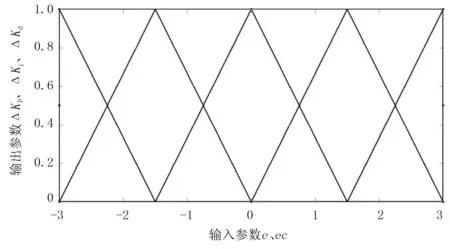
图6 控制变量隶属函数
根据专家经验所得的模糊推理规则如表1所示[12]。
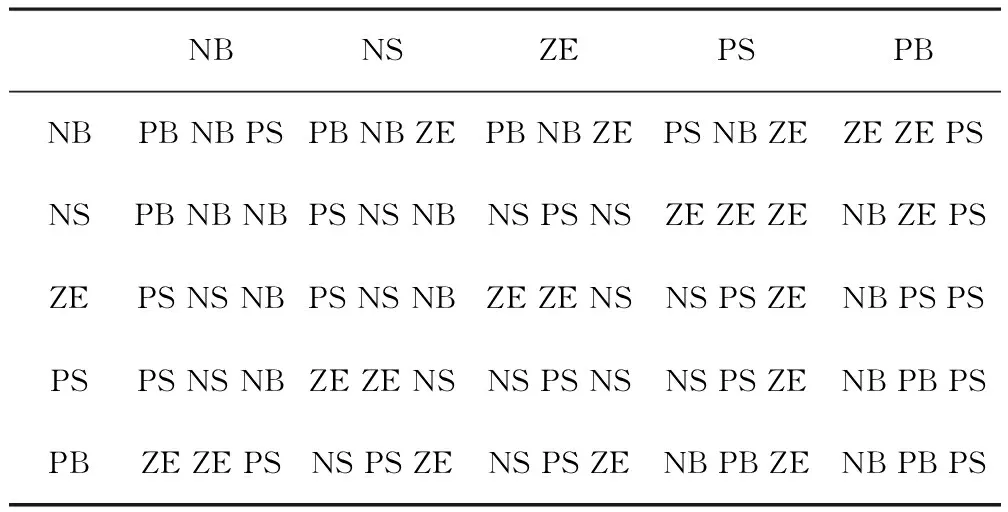
表1 ΔKp、ΔKi、ΔKd模糊推理规则

3.3 遗传模糊PID控制模型
基于遗传优化的模糊PID控制模型主要包含两个部分:模糊PID控制器和遗传算法[13]。控制对象是直流调速器控制的肥路水泵,控制反馈值是流量计采集到的肥流量,控制结构模型如图7所示。
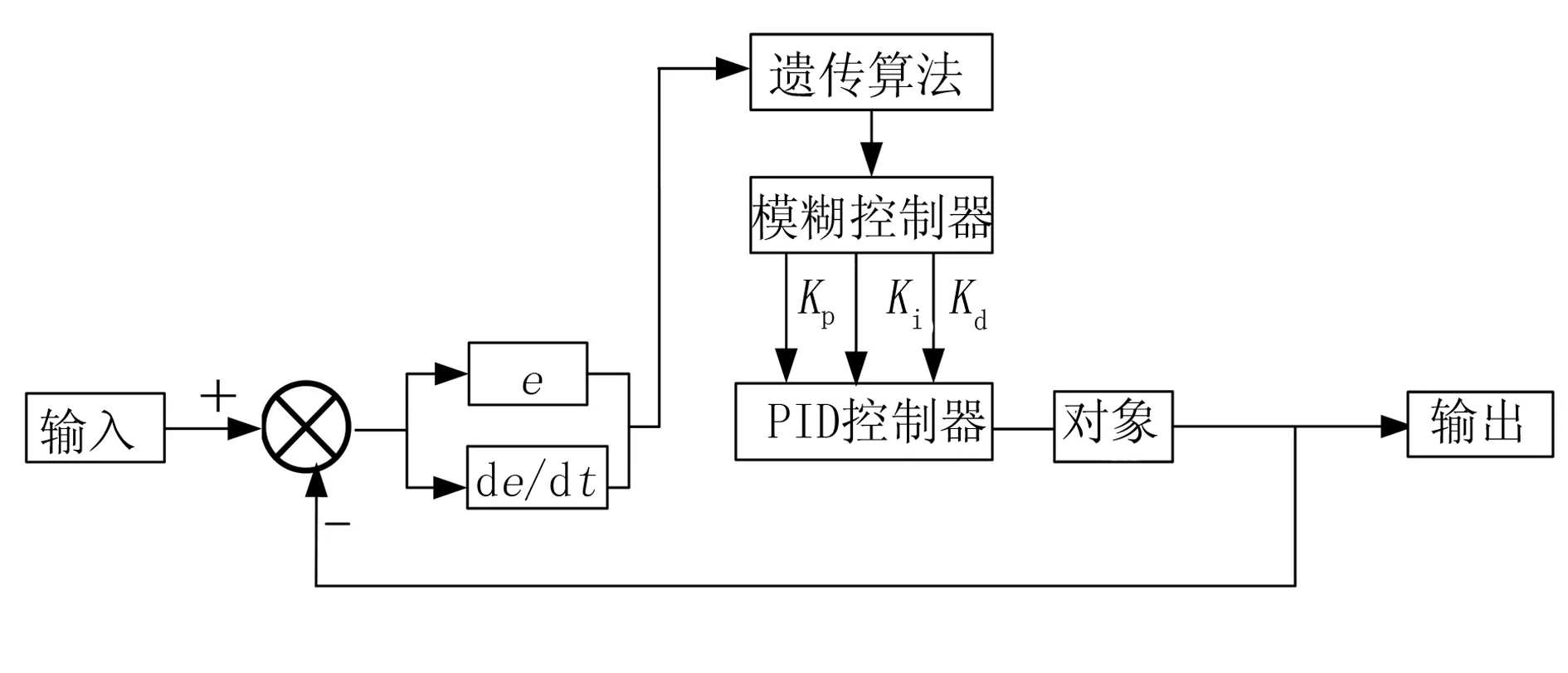
图7 遗传优化的模糊PID控制模型
3.3.1 染色体编码
二进制编码具有编码操作简单易行、便于实现选择、交叉和变异等遗传操作等特点,成为了一种最广泛的编码方式[14]。本文对两个输入变量e、ec和3个输出变量ΔKp、ΔKi、ΔKd这5个参数的模糊语言集合{NB、NS、ZO、PS、PB}采用二进制编码方法,分别对应{001、010、011、100、101}。一个输出变量对应25种规则,3个输出变量对应75种规则,每条规则包含3位,因此个体总长度为225。
3.3.2 适应度函数选取
(2)
3.3.3 遗传操作
本文初步选用比例选择算子来进行选择操作,采用算数杂交来进行叉操作,采用高斯变异算子来进行变异操作[16]。
遗传运行参数选定结果如表2所示。

表2 遗传算法运行参数
4 实验分析验证
4.1 仿真分析
灌溉系统将管路中水肥流量的比例作为实验对象,在MatLab系统的SIMULINK环境下编写遗传算法函数GA-Function,利用SIMULINK模块库FuzzyLogicToolbox建立相应的遗传FuzzyPID模型,采用阶跃输入信号对该模型进行仿真实验,结果如图8所示。

图8 模型仿真图
由图8中可以看出:遗传模糊PID模型相比于模糊PID具有较高的系统稳定性、较短的系统响应上升时间和调节时间,证明了该模型具有更好的控制性和鲁棒性。
4.2 系统验证
利用控制系统中的C8051F120单片机对其中水路通道和肥路通道进行实时采集。将水路采集的电压信号转换为流量值后乘以水肥配比值来作为肥路流量的动态预设值,而肥路的电压信号转换为流量值后直接作为实际肥量。实时肥路流量进行调控然后,再次进行采集对比,如此循环来实现肥路流量与水路流量比的恒定,从而达到精量控制的目的。设置水路流量为1L,肥路流量为60mL,所得的水肥配比结果如图9所示。待灌溉系统稳定后检测到的水路流量控制效果如图10所示,肥路流量控制效果如图11所示。
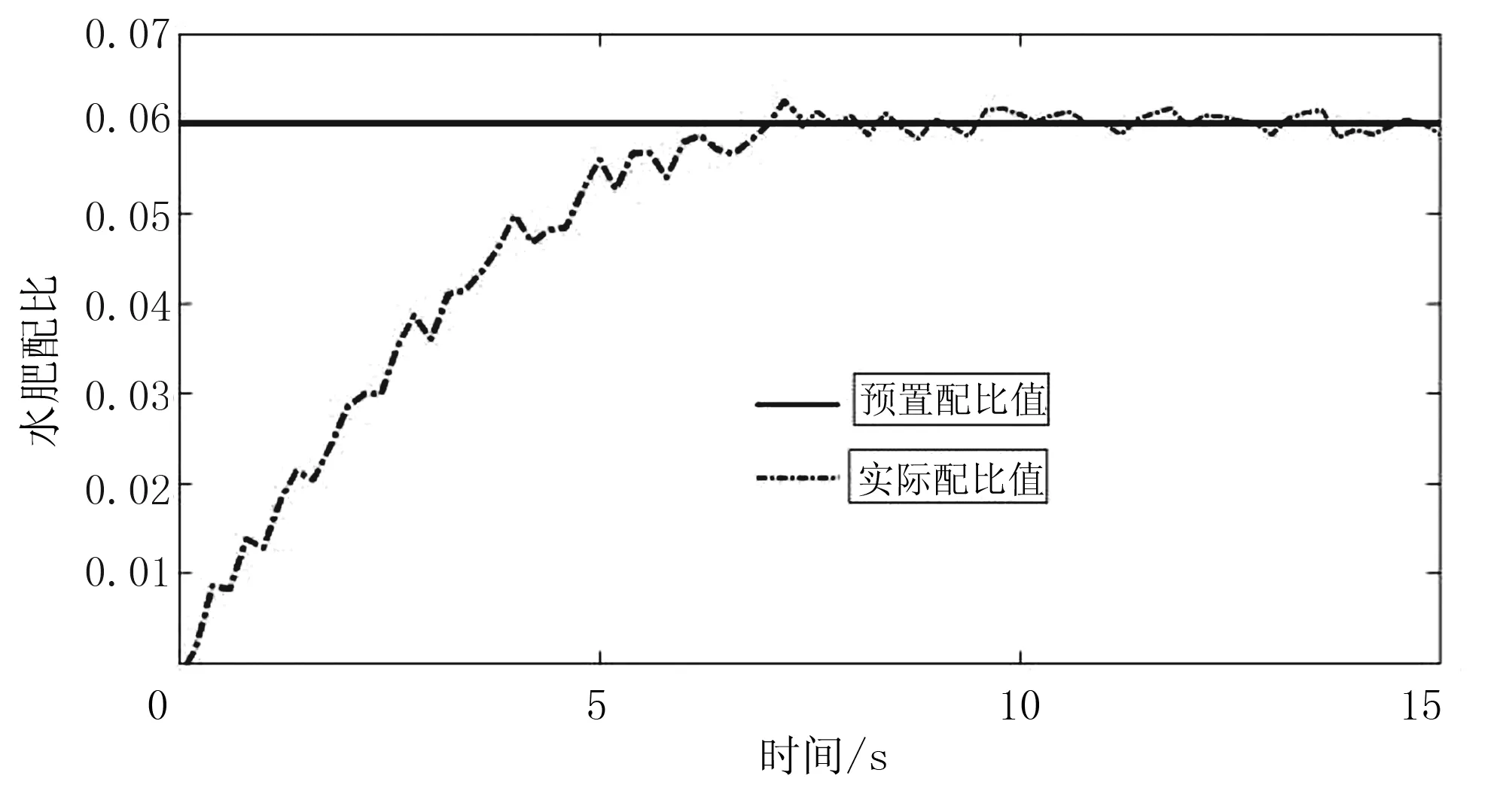
图9 水肥配比效果比较

图10 水路控制情况
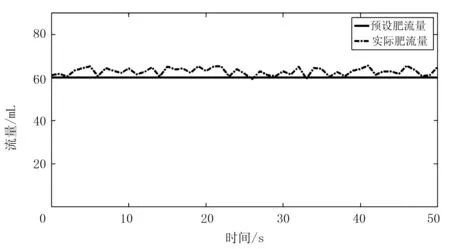
图11 肥路控制情况
实验结果表明:整套系统能准确地控制各个管路中的流量值,具有较高的精度;同时,遗传FuzzyPID模型使得系统在5s左右达到预设的水肥配比值,响应时间短,配比精度高,成功实现了水肥精量配比灌溉。灌溉控制机实物如图12所示。

图12 灌溉控制机实物
5 结论
1)采用遗传算法和模糊控制的结合,有效解决了传统PID控制在面向不确定、非线性对象时的局限性,相应的遗传FuzzyPID模型具有良好的控制性和鲁棒性。
2)该灌溉控制机可以同时完成氮肥、磷肥、钾肥和微量元素4路肥的灌溉,并成功实现了水肥的精量配比,有效地提高了灌溉效率和精度,为农业精量灌溉提供技术支持。
[1] 杨青林, 桑利民, 孙吉茹,等. 我国肥料利用现状及提高化肥利用率的方法[J]. 山西农业科学, 2011, 39(7):690-692.
[2] 蔡甲冰, 刘钰, 雷廷武,等. 精量灌溉决策定量指标研究现状与进展[J]. 水科学进展, 2004, 15(4):531-537.
[3] 郭修武, 王丛丛, 周兴本,等. 水分胁迫下肥料配比对葡萄生长发育的影响[J]. 华北农学报, 2012, 27(2):140-145.
[4] 戴春霞, 赵德安. 基于ARM9内核的智能灌溉控制系统的设计[J].JournalofAnhuiAgriculturalences, 2010, 38(15):8208-8210.
[5] 李荭娜. 自动化施肥控制系统的研究[D].天津:天津大学, 2007.
[6]SchaeferCF,AnthonyK,KrupaS,etal.PID:thePathwayInteractionDatabase[J].NucleicAcidsResearch, 2009, 37(S1):D674-D679.
[7] 王蕾, 宋文忠.PID控制[J].自动化仪表, 2004, 25(4):1-6.
[8] 胡包钢, 应浩. 模糊PID控制技术研究发展回顾及其面临的若干重要问题[J].自动化学报, 2001, 27(4):567-584.
[9] 周黎英, 赵国树. 模糊PID控制算法在恒速升温系统中的应用[J].仪器仪表学报, 2008, 29(2):405-409.
[10] 刘曙光,魏俊民,竺志超.模糊控制技术[M].北京:中国纺织出版社,2001.
[11] 李雷, 杨柳. 基于三角隶属函数和模糊熵的图像增强方法及其相关应用研究[J]. 数学的实践与认识, 2012, 42(19):113-120.
[12] 叶云岳, 陆凯元. 直线电机的PID控制与模糊控制[J]. 电工技术学报, 2001, 16(3):11-15.
[13] 吉根林. 遗传算法研究综述[J].计算机应用与软件, 2004,21(2):69-73.
[14] 黄伟, 龚沛曾. 图像压缩中的几种编码方法[J].计算机应用研究, 2003, 20(8):67-69.
[15] 乔维德. 基于遗传PID整定的感应电动机速度控制研究[J]. 深圳职业技术学院学报, 2009, 8(1):26-29.
[16] 张铃,张钹. 遗传算法机理的研究[J].软件学报, 2000,11(7):945-952.
Design of Water and Fertilizer Precision Ratio Irrigation System
Zhang Yubin1,2, Wei Zhengying1, Jian Ning1, Tu Jingjie2, Zhu Huomei2
(1.State Key Laboratory of Manufacturing System Engineering,Xi’an Jiaotong University,Xi’an 710054,China;2.Ningbo Dahongying University,Ningbo 315171,China)
Precise control of ratio of water and fertilizer in agricultural irrigation can well promote crop’s growth and greatly improve the utilization rate of fertilizer. This paper designs a water and fertilizer precision ratio irrigation system which applies the method of mixed water and fertilizer can regulate the flow of water and fertilizer by pump which is controlled by DC speed governor so as to realize the ratio of water and fertilizer. Control system applies the fuzzy PID model optimized by genetic algorithm to achieve the precision ratio control of water and fertilizer, which improve the traditional PID performance further. The ultimate experimental results show that the system can effectively improve the irrigation accuracy and successfully realize the precise ratio irrigation of water and fertilizer, which has certain popularization and application value.
irrigation system; the precise ratio of water and fertilizer; genetic algorithm; Fuzzy PID
2016-09-21
“十三五”国家重点研发计划项目(2016YFC0400202);“十二五”国家科技支撑计划项目(2015BAD24B00);浙江省公益项目(2014C31163);浙江省教育厅科研项目(Y2014326 54);陕西省科学技术研究发展计划项目(2014K01-33-02);西安市现代农业创新计划项目(NC1310[1])
张育斌(1985-),男,浙江宁波人,助理研究员,博士研究生,(E-mail)lzlgdx08-2@163.com。
S277.9+9
A
1003-188X(2017)12-0107-05
猜你喜欢
中国化肥信息(2022年8期)2022-12-05
今日农业(2022年3期)2022-11-16
机械工业标准化与质量(2022年7期)2022-08-12
农机科技推广(2021年3期)2021-08-02
摄影与摄像(2020年11期)2020-09-10
摄影与摄像(2020年11期)2020-09-10
农业工程学报(2018年8期)2018-05-13
现代园艺(2018年2期)2018-03-15
商周刊(2017年5期)2017-08-22
上海农业学报(2017年4期)2017-04-10
