
基于计算机视觉的棉花生长监测自主导航车辆研究
2017-03-16 11:09罗元成
农机化研究 2017年12期
罗元成,汪 应
(重庆工程职业技术学院,重庆 402260)
基于计算机视觉的棉花生长监测自主导航车辆研究
罗元成,汪 应
(重庆工程职业技术学院,重庆 402260)
为了克服农作物生长大面积遥感监测精度较低的缺陷,实现作物生长态势的自动化监测,提出了一种基于计算机视觉的自主导航作物生长监测车辆,从而有效地提高了作物生长监测的精度和自动化程度。该型自动化车辆通过导航标定线在田间对作物的生长状况进行实时跟踪监测,采用CCD数字摄像头对作物的生长状况进行图像采集,使用PC机对图像进行处理,并将图像利用通信技术传输到远程监控端,并根据图像特征数据建立了作物长势的监测和预测模型。为了验证其可行性,对作物的长势进行了实地测试,通过对叶面指数和作物生物量预测模型的测试表明:数据模型的实测值和理论值基本吻合,利用该方法可以建立多种作物的长势监测和预测模型,具有推广价值。
棉花;长势监测;自主导航;计算机视觉;PC机
0 引言
近年来,计算机视觉逐渐被应用到农作物的长势监测和病虫害诊断技术中,其高效、精确和快速性为农作物的自动化监测提供了一种崭新的技术。随着农业大面积作业的推广,作物长势监测已发展到大尺度的遥感监测阶段,利用数字化相机和视频可以获取近地面的作物生长信息。农作物长势的数字化监测原理是利用计算机视觉技术,结合现代传感器技术,使用PC处理机对图像进行采集,得到特征数据后建立决策模型,从而构建作物长势监测和预测的图像视频库、模型库和知识库等数据库;然后开发相应的系统软件,将复杂农业生产和管理变得简单化和智能化,且覆盖范围广,适合大面积作业。利用计算机视觉技术对于推动现代农作物近地面遥感监测技术的发展,实现作物长势的监测和诊断具有深远的意义。
1 基于计算机视觉和自主导航技术的作物长势监测
近年来,计算机视觉技术在农业中的使用范围和频度越来越高,包括农作物产量预测、作物的形态识别、除草和病虫害的防治等。随着自主导航技术的发展,这些技术将得到极大提高。
1)农作物叶面积的标定。基于计算机视觉技术,Mayer 等研发了一种作物长势的监测系统,并利用计算机处理技术,实现了作物的实时无损监测。美国学者Trooien和Heermann等人利用计算机视觉和图像处理技术,通过采集马铃薯图像,在三维虚拟空间内实现了叶片的合成,从而在真正意义上实现了叶面积的测量。
2)农作物形态识别。作物的形态是作物长势的重要参考数据,基于该思想,Humphries利用农作物的色彩和几何特征,对作物的茎秆、叶片和芽等进行识别,实现了作物长势的智能化监测。Guyer等建立了一种新的作物智能化长势识别系统,并利用17个变量来描述作物的长势特征。
3)病虫害监测与识别。利用计算机视觉技术可有效对作物形态进行监测,以及时发现病虫害。Ridgway研制了一种小麦的病虫害识别系统,利用该系统可以定位麦粒内最重要的亮斑,根据亮斑的阈值来判断小麦是否感染了病虫害。
3)杂草和农作物图像识别。利用计算机视觉技术可以对杂草进行智能化识别,从而实现有针对性的除草,达到较好的除草效果。Adamsen利用机器视觉基础对油菜花图像进行识别,并利用计算机技术对图像进行自动剪裁,成功识别了油菜花数目。在国外,20世纪60年代开始,专家和学者们便开始对除草机器人有了初步的研究,到90年代该项技术得到了较大的支持。图1为除草机器人的模型示意图。
该模型是美国California大学在1999年提出的,主要由两部分组成:一部分是杂草的识别系统,一部分是喷药的控制系统,且配备了自主导航系统。杂草的识别模块包含CCD摄像头、计算机和图像处理组件,喷药控制系统包括微处理器和传感器等,喷药终端有8个喷药头,每个喷药头都通过电磁阀控制。
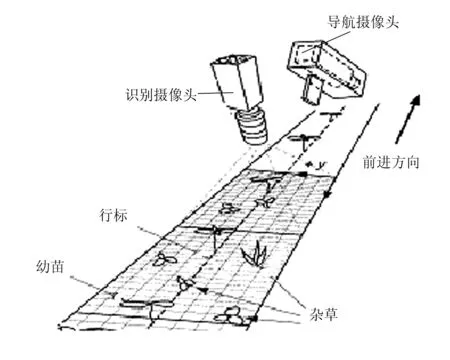
图1 除草机器人模型示意图Fig.1 The sketch diagram of weeding robot model
图2为基于X-ray杂草识别机械作业过程图。该款机型由R.P.Haff等设计,机器配备了X光杂草识别系统,其设计原理是根据农作物和杂草对X光的吸收能力不同,对杂草进行识别。当识别到杂草信号后,X光的强度变化会引起电压信号的变化,利用该信号开启除草控制终端的开关,对杂草进行去除。实验结果表明,该机型的杂草识别率达到了90.7 %。

图2 基于X-ray杂草识别机械Fig.2 The weed identification machine based on X-ray
2 基于机器视觉的冠层覆盖层检测和长势预测
农作物的覆盖度(Canopy cover,CC)主要是指作物群体包括茎、叶、枝等单位面积内的投影比例,利用机器视觉来获取CC可以通过图像分割方法来实现,其计算公式为
CC=(1+L)×[(G-R)/(G+R+L)]
(1)
其中,CC表示农作物的覆盖度;R、G分别表示红光、绿光的分量,表示土壤的基本值,该值取为0.5,据此可以通过实时采集图像的方式来对农作物的CC进行实时监测。为了验证监测的精度,可以采用模型检验方法来对监测结果进行评价,最常用的方法包括均方差法RMSE、相对误差法RE、一致性系数COC和拟合度α。其检验的公式分别为
(2)
(3)
(4)
(5)

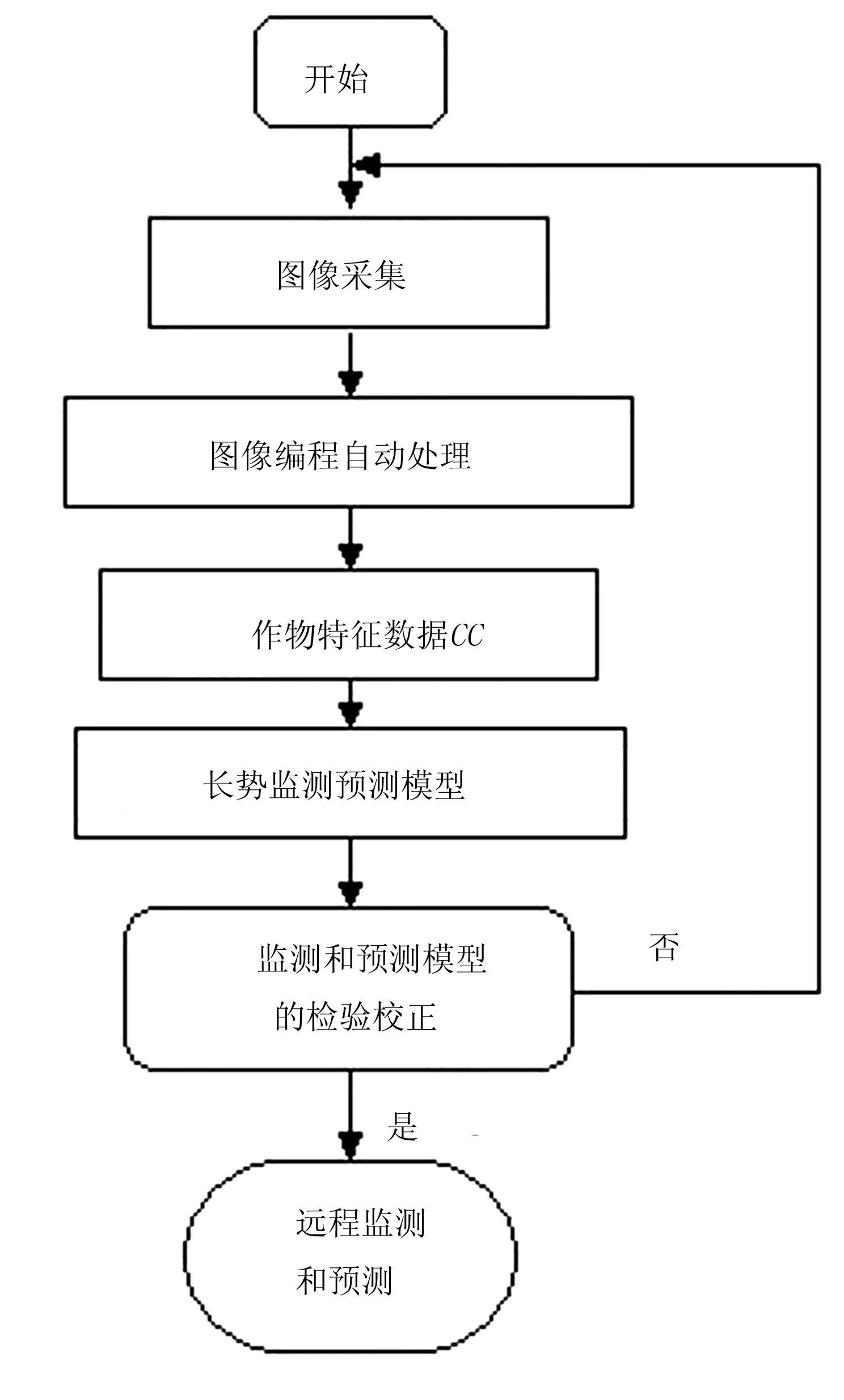
图3 农作物生长监测和预测流程Fig.3 The process of crop growth monitoring and forecasting
基于机器视觉的农作物生长预测主要由4个步骤组成,包括图像数字化采集、图像视觉化处理、建立模型和检验模型,以及长势监测和预测系统的构建。
1)图像数字化采集。作物冠层图像的采集是研究的第1步,也是作物长势监测和预测的关键步骤,可以通过安装摄像头的方法,按照一定的高度和拍摄范围等将其安装在自动导航车辆上,通过调整摄像机的参数,得到了作物的高清图像。
2)图像视觉化处理。视觉化处理主要是利用计算机视觉技术对图像进行分割,提取冠层图像的R和G等色彩特征数据。该过程采用编程的方式实现自动化处理,可以得到CC的特征数据库。
3)建立模型和检验模型。利用得到的冠层图像的特征数据库,可以将其和作物的长势建立一定的数据模型,可以根据图像特征数据来判断农作物的长势,并利用检验模型来验证模型的准确性。
4)长势监测和预测系统。将以上3个步骤进行系统化构建,并可以作为一个应用系统推广到农业实践中,利用微处理器和嵌入式技术,可以将系统安装在具有自主导航能力的小车上,从而实现作物的实时监测和预测。
3 基于计算机视觉的作物生长监测自主导航车辆测试
为了实现作物生长状况的自动化监测,本研究将构建的作物长势监测和预测系统安装到了具有自主导航能力的拖拉机上。拖来机的实物图如图4所示。

图4 自主导航拖拉机Fig.4 The autonomous navigation tractor
本次利用机器视觉技术对其进行了改进,安装了导航摄像头,使其能够识别作物的导航线,从而实现自主导航能力。
图5为计算机视觉部分的实物图,主要包括摄像头和PC处理器。PC处理器安装在拖拉机车头部位,具有强大的图像处理和通信功能,可以实现图像的远程传输。对拖拉机的自主导航能力进行了测试,通过测试得到了如图6所示的导航结果。

图5 计算机视觉部分Fig.5 Computer vision part
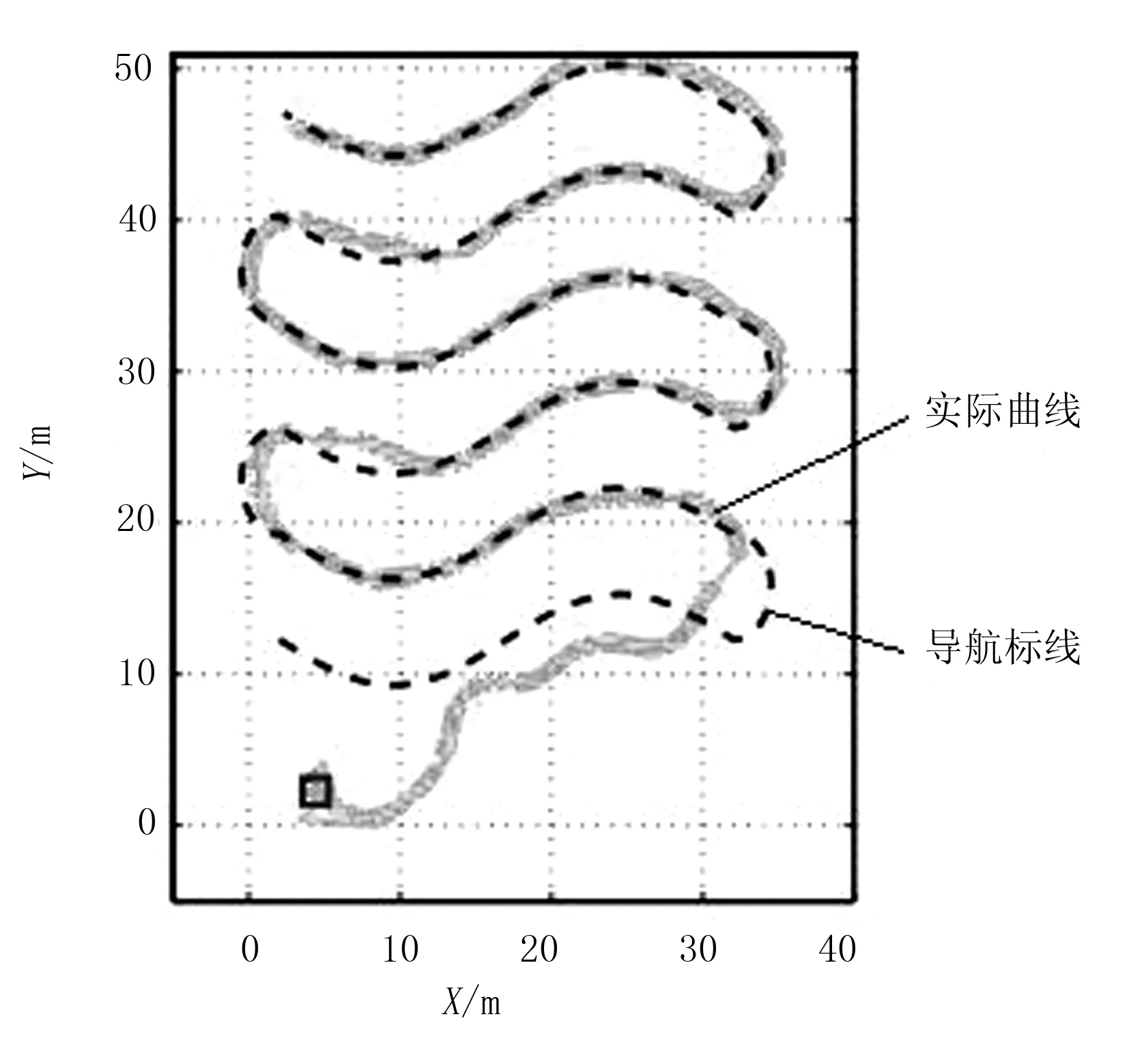
图6 拖拉机自主导航结果Fig.6 The results of autonomous navigation of tractor
测试结果表明:拖拉机可以较为准确地沿着目标导航线行驶,其实际行驶轨迹和导航线标定轨迹基本吻合,实现了设计的目的。
图7为远程端CC的测定返回结果图。由返回结果图可以看出:按照在拖拉机上的PC机可以有效地完成图像的分割处理,从而为建立数据模型提供了图像数据库。
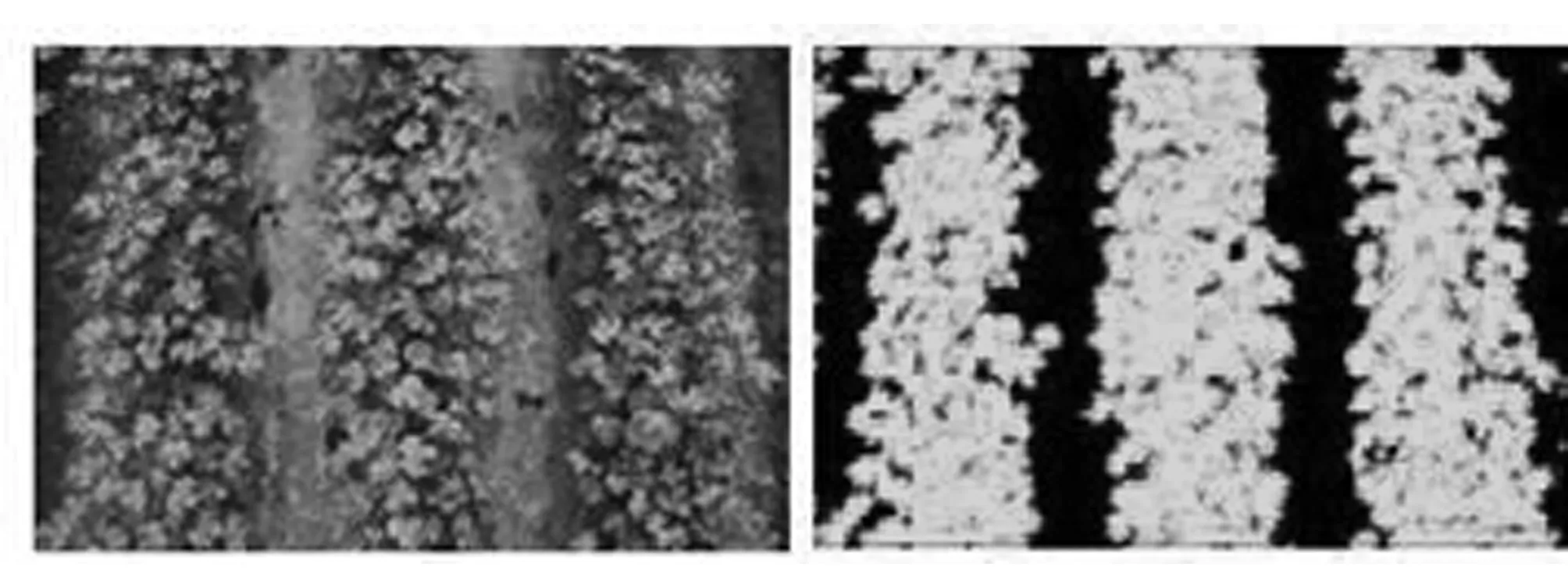
图7 CC测定返回图Fig.7 The return diagram of CC determination
图8为通过冠层覆盖数据采集得到的叶面指数模型。测试结果表明:叶面指数数据模型的实测值和理论值基本吻合,可利用该方法进行作物长势模型的预测。为进一步研究其可行性,建立了如图9所示的土壤上部生物量的长势预测模型。
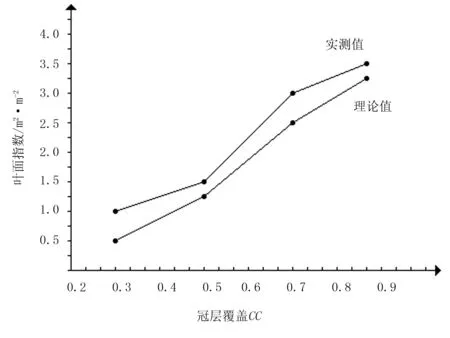
图8 冠层覆盖叶面指数模型Fig.8 The index model of canopy cover
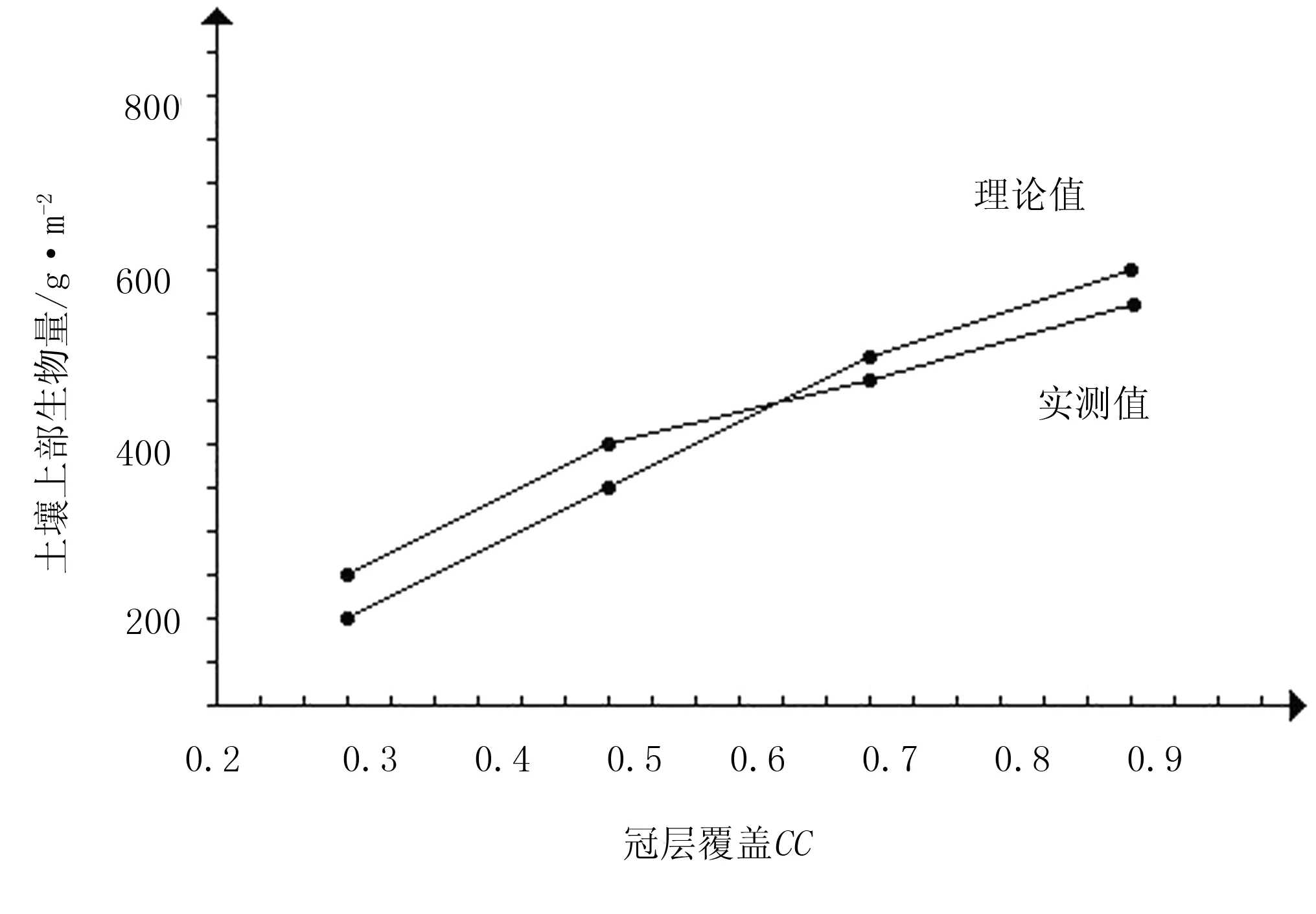
图9 冠层覆盖生物量模型Fig.9 The biomass model of canopy cover
测试结果表明:生物量数据模型的实测值和理论值基本吻合,从而验证了预测模型的可靠性。因此,可以利用该方法建立多种作物的长势监测和预测模型,从而实现作物的快速、精确和自动化长势监测和预测。
4 结论
基于大面积近地面遥感监测技术,提出了一种基于计算机视觉的自主导航作物生长监测车辆,有效地提高了近地面远程监测的精度和智能化程度。为了验证其可行性,采用农田试验测试的方法,对车辆的导航性能和监测预测性能进行了测试。首先在田间标定了导航线,通过对其自主导航能力的测试发现:拖拉机可以较为准确地沿目标导航线行驶,其实际行驶轨迹和导航线标定轨迹基本吻合。对作物的长势进行了监测实验,结果表明:叶面指数和作物生物量数据模型的实测值和理论值基本吻合。由此验证了其在农作物长势预测中使用的可行性和可靠性,可以将其在农作物现代化监测车辆中进行推广使用。
[1] 李亚兵,毛树春,韩迎春.不同棉花群体冠层数字图像颜色变化特征研究[J].棉花学报,2012,24(6):541- 547.
[2] 李荣春,陶洪斌,张竹琴,等.基于图像处理技术的夏玉米群体长势监测研究[J].玉米科学,2010,18(2): 128-132.
[3] 李红军,张立周,陈曦鸣,等.应用数字图像进行小麦氮素营养诊断中图像分析方法的研究[J].中国生态农业学报,2011,19(1):155-159.
[4] 董 鹏,危常州,雷咏雯,等.基于计算机视觉和土壤 Nmin 的棉田氮素养分管理系统的建立与验证[J].新疆农业科学,2011,48(4):606-610.
[5] 李明思,康绍忠,杨海梅,等.地膜覆盖对滴灌土壤湿润区及棉花耗水与生长的影响[J].农业工程学报,2007, 23(6):49-54.
[6] 孔清华,李光永,王永红,等.不同施肥条件和滴灌方式对青椒生长的影响[J].农业工程学报,2010,26 (7):21-25.
[7] 王志强.关于甘肃水资源问题及其对策的思考[J].甘肃水利水电技术,2011,47(5):1-3.
[8] 张秋汝,杨双,徐潇禹,等.基于 3G 和 GSM 技术高度自动化节水灌溉系统的研究[J].科技信息,2012 (5):100-101.
[9] 汪慧颖,洪军.视频监控系统在节水改造工程自动化控制中的应用[J].科技资讯,2012(16):39.
[10] 李光林,李晓东,曾庆欣,等.基于太阳能的柑桔园自动灌溉与土壤含水率监测系统研制[J].农业工程学报,2012,28(12):146-152.
[11] 蔡义华,刘刚,李莉.基于无线传感器网络的农田信息采集节点设计与试验[J].农业工程学报,2009,25 (4):176-178.
[12] 韩华峰,杜克明,孙忠富.基于ZigBee网络的温室环境远程监控系统设计与应用[J].农业工程学报,2009,25(7):158-163.
[13] 姚振宪,王三建.我国滴灌发展历程及建议[J].农业工程,2011,1(2):55-57.
[14] 徐飞鹏,李云开,任树梅.新疆棉花膜下滴灌技术的应用与发展的思考[J].农业工程学报,2003,19(1):25- 27.
[15] 韩恒,杜文亮,常荣,等.旧滴灌带抗拉拔试验研究[J].节水灌溉,2015(1):24-26,32.
[16] 牛金亮,林静,邢作常,等.免耕播种机液压式加载仿形深度控制系统设计[J].农机化研究,2012,34(12): 101-104.
[17] 范旭辉,贾洪雷,张伟汉,等.免耕播种机仿形爪式防堵清茬机构参数分析[J].农业机械学报,2011, 42(10):56-60.
[18] 姬江涛,郑治华,杜蒙蒙.农业机器人的发展现状及趋势[J].农机化研究,2014,36(12):1-4.
[19] 乔永亮,何东键,赵川源,等.基于多光谱图像和SVM的玉米田间杂草识别[J].农机化研究,2013(8):30-34.
[20] 姬长英,周俊.农业机械导航技术发展分析[J].农业机械学报,2014,45(9):44-54.
[21] 孟庆宽,何洁,仇瑞承,等.基于机器视觉的自然环境下作物行识别与导航线提取[J].光学学报,2014,34(7):1-7.
[22] 刘金龙,郑泽锋,丁为民,等.对靶喷雾红外探测器的设计与探测距离测试[J].江苏农业科学,2013,41(7):368-370.
[23] 高国琴,李明. 基于K-means算法的温室移动机器人导航路径识别[J].农业工程学报,2014,30(7):25-33.
[24] 方莉娜,杨必胜. 车载激光扫描数据的结构化道路自动提取方法[J]. 测绘报,2013,42(2):260-267.
[25] 陈运鹏,龙慧,刘志杰.我国施肥技术与施肥机械的研究现状及对策[J].农机化研究,2015,37(4):255-260.
[26] 汤龙飞,许志红.交流接触器新型智能抗电压跌落控制模块的设计[J].中国电机工程学报,2012,32(27):95-103.
Autonomous Navigation Vehicle for Cotton Growth Monitoring Based on Computer Vision
Luo Yuancheng, Wang Ying
(Chongqing Vocational Institute of Engineering, Chongqing 402260,China)
In order to overcome the crops growth defect of large area with low precision of remote sensing monitoring, it proposed a crop growth situation of automation monitoring based on computer vision of autonomous navigation for crop growth monitoring vehicle. So as to effectively improve the precision and the degree of automation of the crop growth monitoring. It collected the automated vehicle navigate through the calibration line real-time tracking and monitoring in the field on crop growth status and images by CCD digital camera on crop growth status. By using PC for image processing and image and using communication technology to transmit to the remote monitoring terminal, finally, it established a monitoring and prediction model of crop growth according to the characteristics of the image data. In order to verify the feasibility, the growth of crops were field tested, by the prediction of leaf area index and crop biomass model tests,it show that the data model of measured value theory and value of the basic was both very unify. By using this method, we can establish a variety of crop growth monitoring and prediction model, the promotion of the technology.
cotton; growth monitoring; autonomous navigation; computer vision; PC
2016-08-11
重庆市教育委员会重点项目(1202086)
罗元成(1982-),男,重庆人,实验师,(E-mail)ycluo82@sohu.com。
S562;TP13
A
1003-188X(2017)12-0205-05
猜你喜欢
今日农业(2022年1期)2022-11-16
今日农业(2022年16期)2022-11-09
今日农业(2022年16期)2022-09-22
今日农业(2022年15期)2022-09-20
今日农业(2022年13期)2022-09-15
科教新报(2022年22期)2022-07-02
今日农业(2021年16期)2021-11-26
今日农业(2020年17期)2020-10-27
高中生学习·阅读与写作(2019年2期)2019-09-10
农村农业农民·B版(2016年7期)2016-10-21
