复杂直流输电控制保护系统和ADPSS融合仿真技术研究
2017-03-16 08:13孙丽香
四川电力技术 2017年1期
穆 清,张 星, 孙丽香
(中国电力科学研究院, 北京 100019)
复杂直流输电控制保护系统和ADPSS融合仿真技术研究
穆 清,张 星, 孙丽香
(中国电力科学研究院, 北京 100019)
随着直流输电系统的规模、容量和对电网运行的影响与日剧增,直流输电系统复杂的控制保护特性越来越受到运行分析的关注。对复杂直流输电控制保护系统与ADPSS电磁暂态仿真平台的融合仿真技术进行研究,提出了静态链接和动态链接两种融合仿真方法;并研究了各种仿真方法下的直流控制保护系统的融合接口设计;最后建立了复杂直流控制保护系统与ADPSS融合仿真系统,该系统充分保留了直流输电系统控制保护特性,为研究各种故障下的直流输电的运行状态提供了强大的技术支撑。
HVDC; 直流控制保护系统; 融合仿真; 融合接口
0 引 言
现代电力系统中,以直流输电为代表的柔性电力系统设备已经成为电力系统的重要部分。它具备了功率的快速控制能力和远距离大容量输电能力;同时,它的快速调节和控制的能力也对电力系统运行产生着重要的影响。
近10年来,随着直流输电规模和容量的不断增大,发生了一些对电网运行影响较大的直流输电故障[1],这些故障对电网运行和安全提出了新的挑战。准确仿真直流输电的动态特性,为直流输电研究提供准确工具,成为应对这一挑战的必要手段。
控制保护系统是直流输电的核心设备,其特性直接决定了直流输电的运行特性。控制保护系统的准确描述是对直流输电动态特性仿真的前提[2]。
传统的机电暂态仿真工具采用了直流输电的准稳态模型,因此控制保护系统的模拟也采用了准稳态的简化模型[3]。
电磁暂态仿真可以采用很小的仿真步长实现小时间尺度的精细化仿真,对直流输电的一次系统可以进行准确地模拟。但是由于控制保护系统的结构和逻辑非常复杂,直接在电磁暂态仿真工具中进行详细直流控制保护系统的建模工作非常复杂,还要相应简化,其效率低,准确性也较难保证[4]。到目前为止,复杂直流控制保护模型还没有特别有效的建模手段。
1 研究背景
为了探索更加高效实用的直流输电控制保护仿真模型,各种直流控制保护系统和电力系统分析平台的混合仿真方法得到了研究和探索。
用户可以通过自定义的方式在PSCAD /EMTDC软件中建立直流输电控制保护系统的局部功能和逻辑,比如直流线路保护模型[5]和SYMADYN D的保护功能[6],实现一定功能的混合仿真。
ABB公司根据自身的直流控制保护系统MACH2,在PSCAD系统中建立了一个虚拟MACH2系统,基本保留了直流控制保护系统的功能。但是,由于此研究采用了静态链接技术,存在符号表冲突,无法快速完成多条直流的布置,同时静态链接也很难对直流控制保护逻辑进行修改。
复杂直流控制保护系统还可以采用进程级融合与EMTDC进行融合仿真[7],但是进程级融合仿真需要进程间通讯,系统调度开销大,仿真效率较低。
这里探索和比较了基于静态链接和动态链接的融合仿真技术,分析了两种融合仿真技术的关键点,提出了基于两种融合仿真技术的ADPSS与复杂直流控制保护系统的融合仿真方法,保证了ADPSS融合仿真技术的灵活性。同时,还对融合仿真的同步机制和调度接口进行研究和设计。最后,测试了融合仿真的准确性和仿真速度,证明了融合仿真适用于研究直流输电的详细特性和事故反演等对准确性要求较高的场合。
2 研究方案
2.1 基于静态链接的融合仿真架构
静态链接就是在程序生成一个面向某一个仿真场景的exe文件时,把所有需要的仿真系统的功能函数的二进制代码文件都包含到可执行文件中去。
链接器(Link.exe)在整个程序融合的过程中发挥了最重要的作用,也决定了静态链接的本质特性。
链接器的基本工作原理如下:
首先,链接器根据目标文件提供的信息,知道参加链接的目标文件需要的外部函数和变量的信息。这些信息需要通过目标文件的符号表和重定位表来获取。
其次,链接器会合并相似段。每一个目标文件,包括Lib文件都是由很多标准段组成的,链接器将把所有需要链接的目标文件中的相似段放在可执行文件的对应段中,如图1所示。计算出输出文件中各个段合并后的长度与位置,并建立映射关系。
最后,将每个符号引用与它输入的可重定位目标文件中的符号表中的一个确定的符号定义联系起来。重定位符号使得目标文件能正确调用到其他目标文件提供的函数和变量。
因此,静态链接的本质就是通过链接器把所有的功能函数目标文件合并到一起,并建立内部的映射关系,组成一个大型的可执行目标程序。
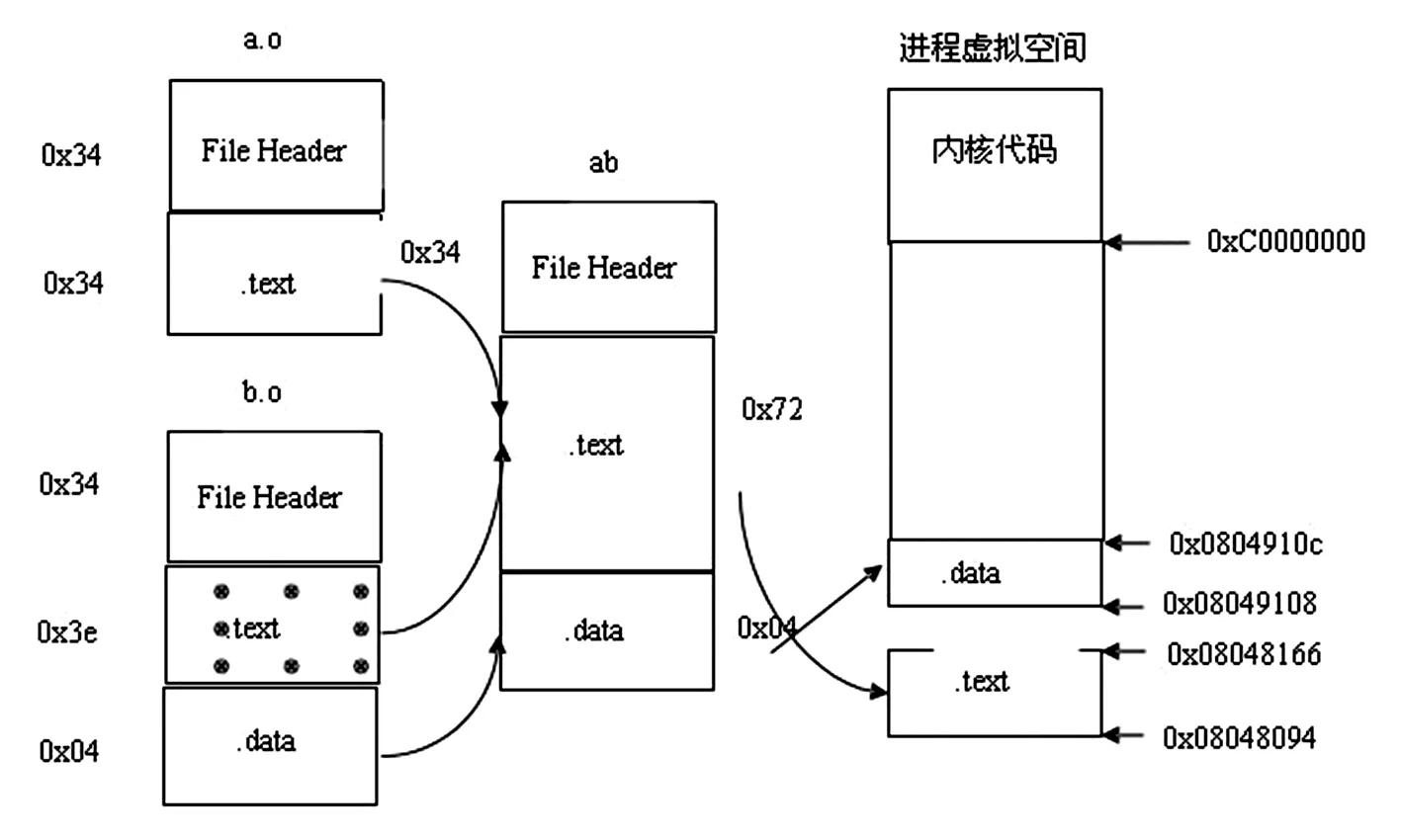
图1 静态链接器的工作原理
传统的复杂直流控制保护系统的仿真技术采用静态链接融合仿真技术,见图2。
HVDC Controller1、 HVDC Controller2、HVDC controller3是3个复杂直流控制保护系统。每一个直流控制保护系统内部有系统的程序目标文件(Objective File),例如user1.obj、user2.obj、user3.obj等等。这些程序目标文件含有了直流控制保护系统内容的所有功能信息,通过程序的函数来表示。同时,电磁暂态仿真系统提供了一个静态库ADPSS.lib文件,也通过程序中的函数来表示。这个静态库中包含了进行电力系统电磁暂态仿真所需要的所有功能模块。
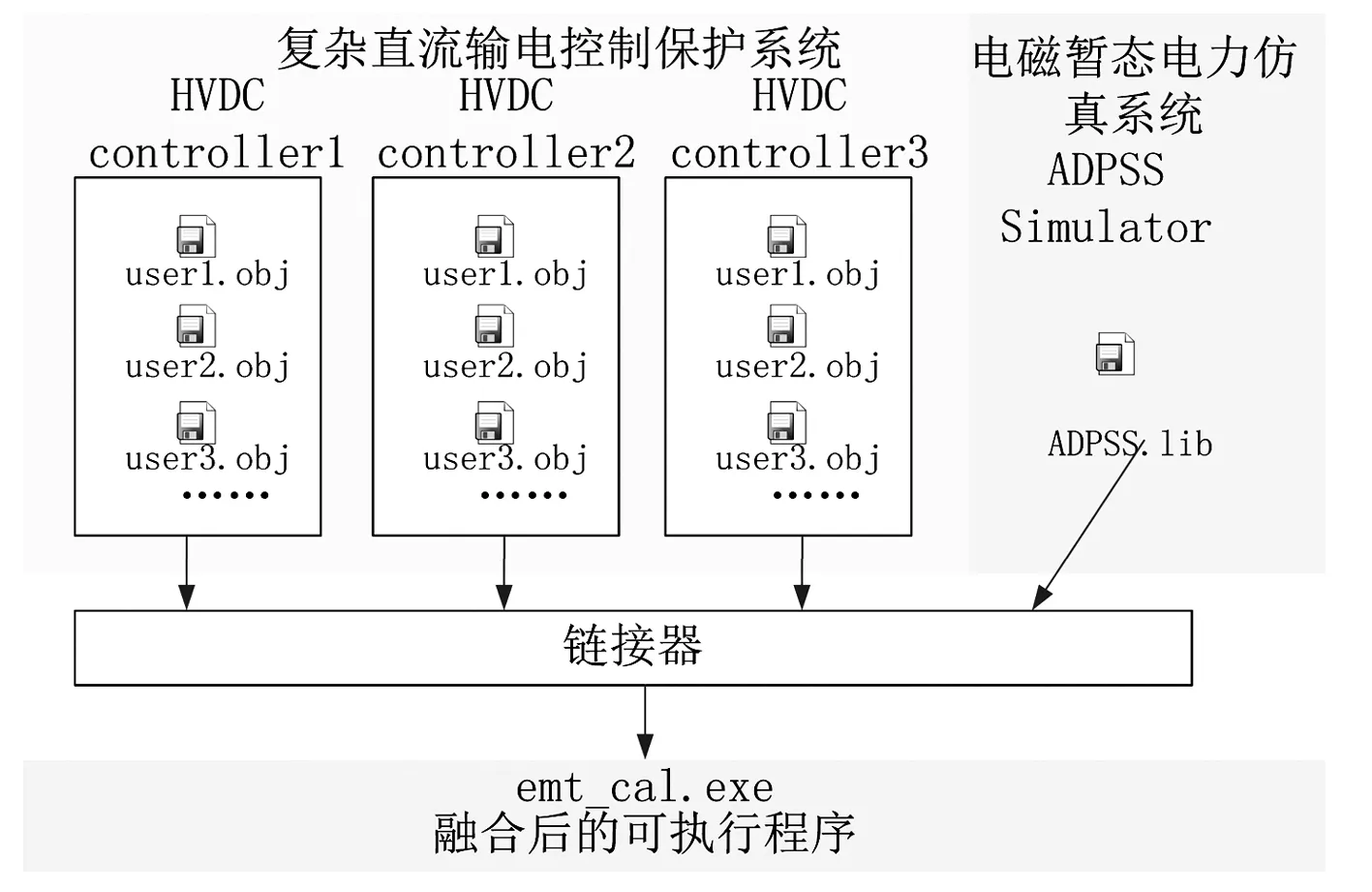
图2 静态链接的融合仿真
为了生成融合仿真的可执行程序,电磁暂态仿真系统的ADPSS.lib和复杂直流控制保护系统的所有目标文件还需要通过链接器相互链接在一起,并一起包含到融合后的可执行文件emt_cal.exe中。
通过执行emt_cal.exe的程序,实现复杂的直流控制保护系统和ADPSS电磁暂态仿真的融合仿真。
静态链接的优势是:
1)代码装载速度快,执行速度略比动态链接库快;
2)生成的可执行文件对原有的文件不再存在依赖关系,可移植性好。
静态链接的缺点是:
1)生成的可执行文件体积很大,包含了很多公共代码,比较浪费;
2)静态链接需要提供复杂控制保护系统的目标文件,对融合仿真系统的开发性要求很高;
3)融合仿真系统的子系统更新困难。
2.2 基于动态链接的融合仿真架构
动态链接技术是为了解决空间浪费和更新困难这两个静态链接的缺点而提出的。它把程序的模块相互划分开来,形成独立的文件,而不再将它们静态地链接在一起,把链接过程推迟到运行时再进行。
以Linux的动态链接技术为例,动态链接机制的核心是引入了全局偏移表(global offset table,GOT)和过程链接表(procedure linkage table,PLT)实现了位置无关代码(position independnet code,PIC)。
基本实现方法如下:
1)动态链接器ld.so程序把动态库中的目标文件的可加载段进行整体地映射,然后返回一个虚拟映射地址用于库内函数的寻址;
2)修改动态库中的哈希表、符号表、重定位表,并存入全局的库映射结构中,然后按照相似的方法对依赖库进行映射,完成全局偏移表的设置;
3)通过PLT表跳转到调用函数的入口,并查找到库内对应函数的偏移地址(sym->st);根据入口地址(reloc_offset)和偏移地址(sym->st)返回动态链接库函数的调用地址,完成重定位功能(reloc),如图3所示。
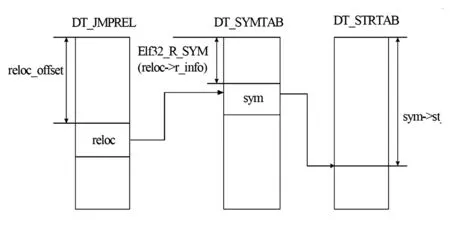
图3 由重定位偏移查找要解析的符号名称
复杂直流输电控制保护系统和ADPSS的动态链接技术参考了动态链接机制,与静态链接技术有较大的不同,结构如图4所示。
ADPSS电力系统仿真主程序(emt_cal.exe)保留了很多程序占位函数如ptr1()、ptr2()、ptr3()等。在仿真系统没有真正使用到复杂控制保护系统模型时,占位函数没有被执行。即使用户没有控制保护程序的动态库,仿真也能顺利进行。如果用户的算例里使用了复杂直流控制保护模型功能,ADPSS仿真程序就会运行相应的占位函数。占位函数就可以通过动态链接,寻找调用功能函数的地址(ptr1、ptr2、ptr3…),把控制保护的相应功能函数PCP()、CCP()直接加载到内存中,进行融合仿真运算。
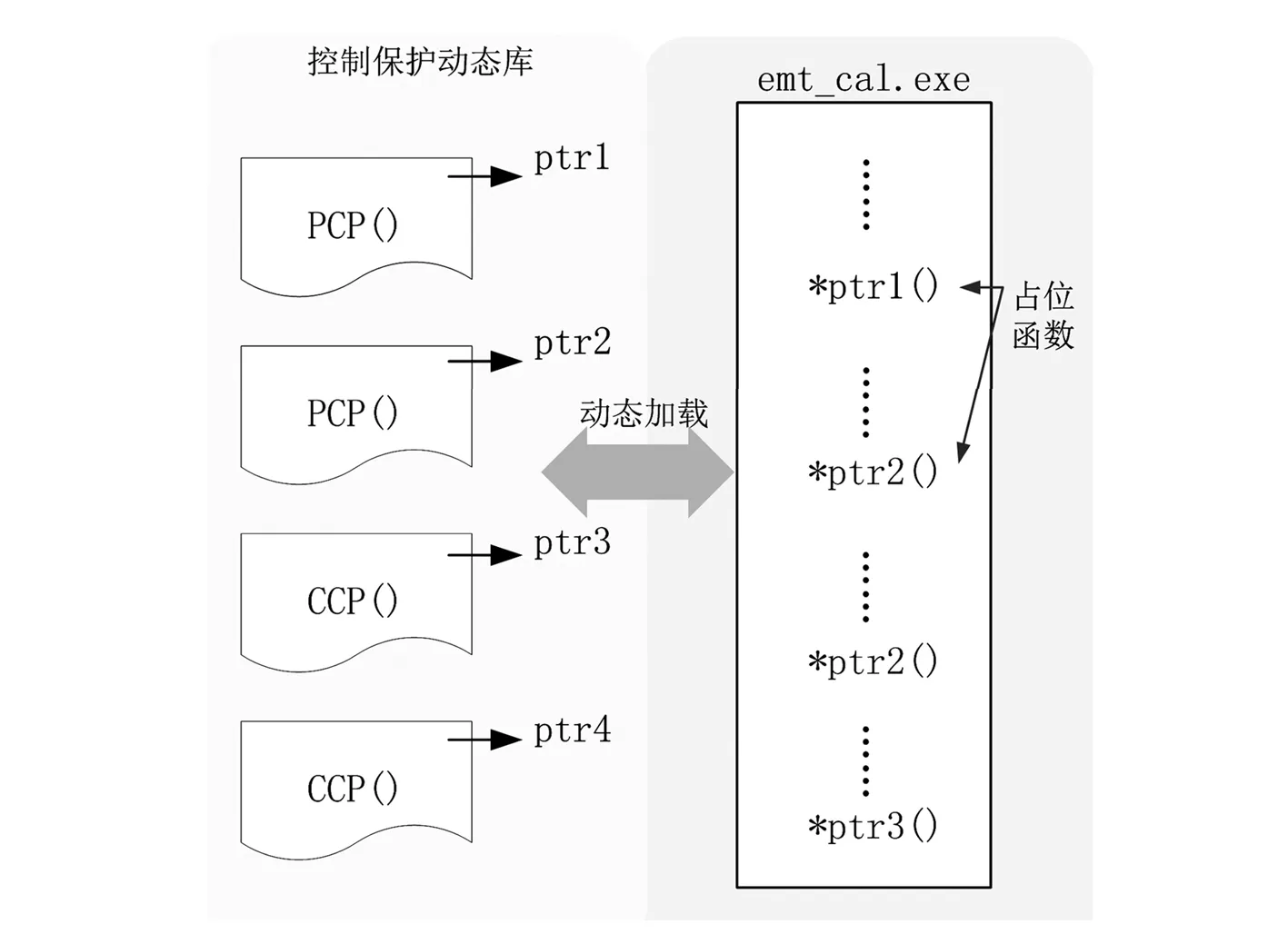
图4 直流控制保护系统动态链接机制
动态链接的优势是:
1)库灵活性好,针对不同的用户可以开发不同功能和复杂度的软件;
2)动态延时加载,节省了大量的内存空间,并可以在不影响主任务功能的情况下,动态地加载和关闭动态链接。
动态链接的缺点是:
1)加载速度稍慢,执行速度也稍慢于静态链接;
2)本机需要保存动态链接库文件,程序运行有一定依赖性。
所设计的融合仿真系统将以动态链接技术为主。
2.3 控制保护系统融合仿真同步接口
为ADPSS仿真平台模拟真实的电力系统物理环境与外部设备连接,ADPSS设计融合仿真同步接口,提供复杂直流控制保护系统和ADPSS电力系统仿真平台的同步接口。接口主要分为3个:同步时钟接口、信号接口和同步调度执行接口。
2.3.1 同步时钟接口
由于实际直流控制保护模型需要运行在实时方式下,所有的逻辑和延时环节都涉及到物理时间;而ADPSS电磁暂态仿真平台本身是一个模拟仿真计算程序,它是以仿真环境中的相对时间为时标的。如果需要使实际直流控制保护模型的执行时刻尽量符合实际工况,就要把它的时间同步到ADPSS的相对时钟,让模型能在模拟仿真程序的相对时钟下产生实时化效果。
但是控制保护系统一般不能直接接受时间,它能接受的是外部的晶振信号。因此,需要依靠晶振信号传递来同步相对时钟,过程如图5所示。ADPSS电力仿真系统根据自身的仿真步长生成一个宽幅的脉冲模拟晶振的输出,并把这个宽幅脉冲输入到HVDC控制保护系统中做为时钟输入。同时,在HVDC控制保护系统内部,根据电力系统的仿真步长设置好外部晶振的频率,调整出和ADPSS电力系统仿真系统完全同步的时钟。
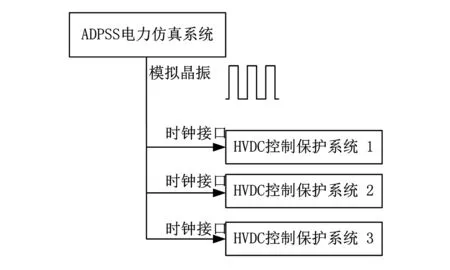
图5 时钟接口
2.3.2 信号接口
复杂直流控制保护系统与ADPSS电力系统仿真平台在统一了时标以后,就能相互传递信号,实现控制和响应功能。直流控制保护装置的控制功能比较复杂,需要的输入、输出信号也非常多。为了实现控制保护系统的完整动态特性同时又降低融合仿真接口设计的复杂性,融合仿真系统需要对复杂直流控制保护输入、输出信号进行相应的处理和简化。
在经过处理和简化以后,直流控制保护模型和电磁暂态仿真程序提供的通道信号数量为248个,有控制命令和指令、阀控制信号、测量模拟量输入、断路器控制信号、发站间通讯、收站间通讯、发极间通讯、收极间通讯、TFR通道和断路器状态信号等10大类。表1是主要信号的分类以及相关的数量。
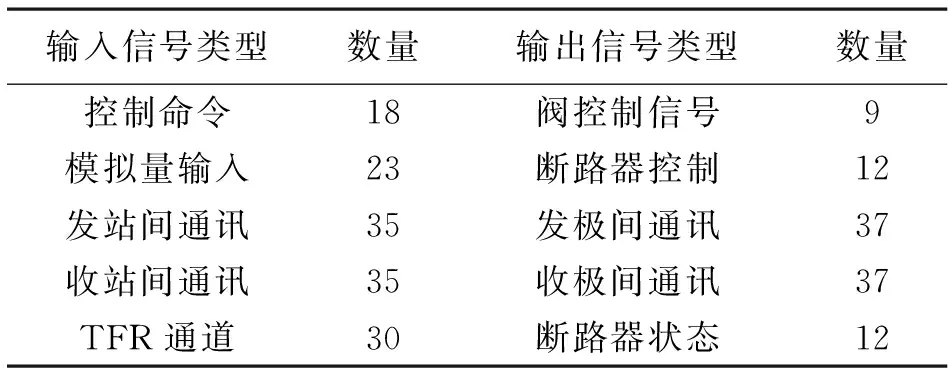
表1 直流控制保护装置的主要信号的分类以及相关的数量
2.3.3 同步调度执行接口
详细直流控制保护系统是分层结构的,内部每一个功能函数的执行周期并不相同,如果只是建立相应的功能函数,而没有考虑分层功能,就不能准确模拟直流控制保护的行为。
根据实际直流控制保护系统的分层结构,提出在ADPSS平台中模拟分层执行的解决方案。直流控制保护的执行分为6个不同层次,每一层次有自己独立的执行使能信号,包括OPN(1)、OPN(2)、OPN(3)、OPN(4)、OPN(5)和OPN(6),各层的使能信号统一由ADPSS的一个调度执行接口发出。
OPN(1)的信号每1个周期发出,OPN(2)的信号每2个周期发出,OPN(3)的信号每6个周期发出,OPN(4)的信号每12个周期发出,OPN(5)的信号每24个周期发出,OPN(6)的信号每48个周期发出。相应层次的功能函数,在相应OPN使能信号发出以后执行。如此以后,实际工程的分层执行得到了完整的保留和仿真,同时也能减少很多不必要的执行时间,保证了详细控制保护模型的执行速度。
3 系统验证测试
以龙泉-政平(简称为“龙政”)直流输电工程作为研究背景,建立复杂直流控制保护系统和ADPSS电力系统仿真平台的融合仿真系统。通过比较实际故障录波和仿真平台的仿真结果,测试其有效性和准确性。
3. 1 测试系统
基于ADPSS建立的龙政直流输电系统仿真模型示意图见图6。
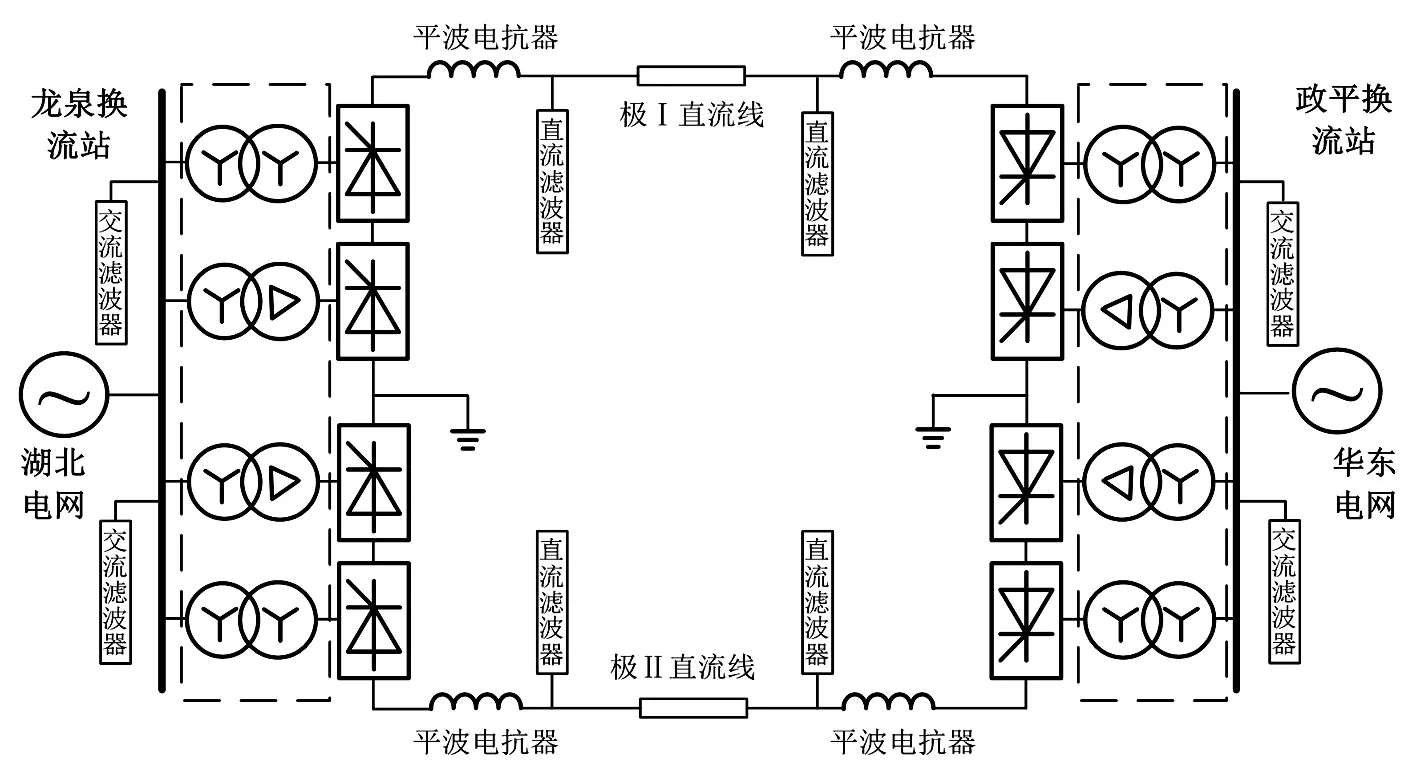
图6 龙政直流输电系统数字仿真模型示意图
仿真模型主要包括换流站两端交流电网、整流侧换流站、直流线路、逆变侧换流站。
换流站两端交流电网包括除换流站500 kV母线、交流滤波器以外的换流站交流场以及换流站外部电网。
换流站一次系统模型包括500 kV交流母线、交流滤波器、换流变压器、换流阀、平波电抗器、直流滤波器等。
复杂直流控制保护系统包括换流站基本控制功能,如换流站触发控制(CFC)、换流站模式顺序控制(MSQ)、换流站无功控制(RPC)、换流变压器分接头控制(TCC)等,还包括不跳闸类的保护系统模型,系统对不影响直流输电系统电磁暂态特性的控制保护功能进行了简化。
由此可知,基于ADPSS建立的直流输电工程模型在一次系统结构、一次设备参数上完全相同,而复杂直流输电控制保护系统与实际现场的控制保护系统功能基本一致。
3.2 现场事故描述
2013年9月24日09点34分,龙泉换流站极Ⅱ直流线路故障,线路突变量保护动作,全压启动不成功。之后,欠压、纵差保护动作,全压启动成功,故障点距龙泉站670.3 km。
事件发生前,龙泉换流站处于双极大地运行方式,龙泉换流站送政平换流站功率为3 000 MW。本次事件未损失负荷,直流控制保护动作正确。
3.3 融合仿真有效性测试
将仿真结果与录波数据进行对比,换流变压器网侧电压、Y/Y换流变压器阀侧三相电流、Y/D换流变压器阀侧三相电流、直流线路电压UDL、直流线路电流IDL以及换流阀触发角的对比结果如图7至图11所示。

图7 极Ⅱ换流变压器网侧电压波形对比
1) 整流站交流母线电压和换流变阀侧电流
图7中,整流站交流母线电压的仿真结果与实际故障录波相比趋势相同,数值偏差较小。故障发生前后,交流电压保持稳定。
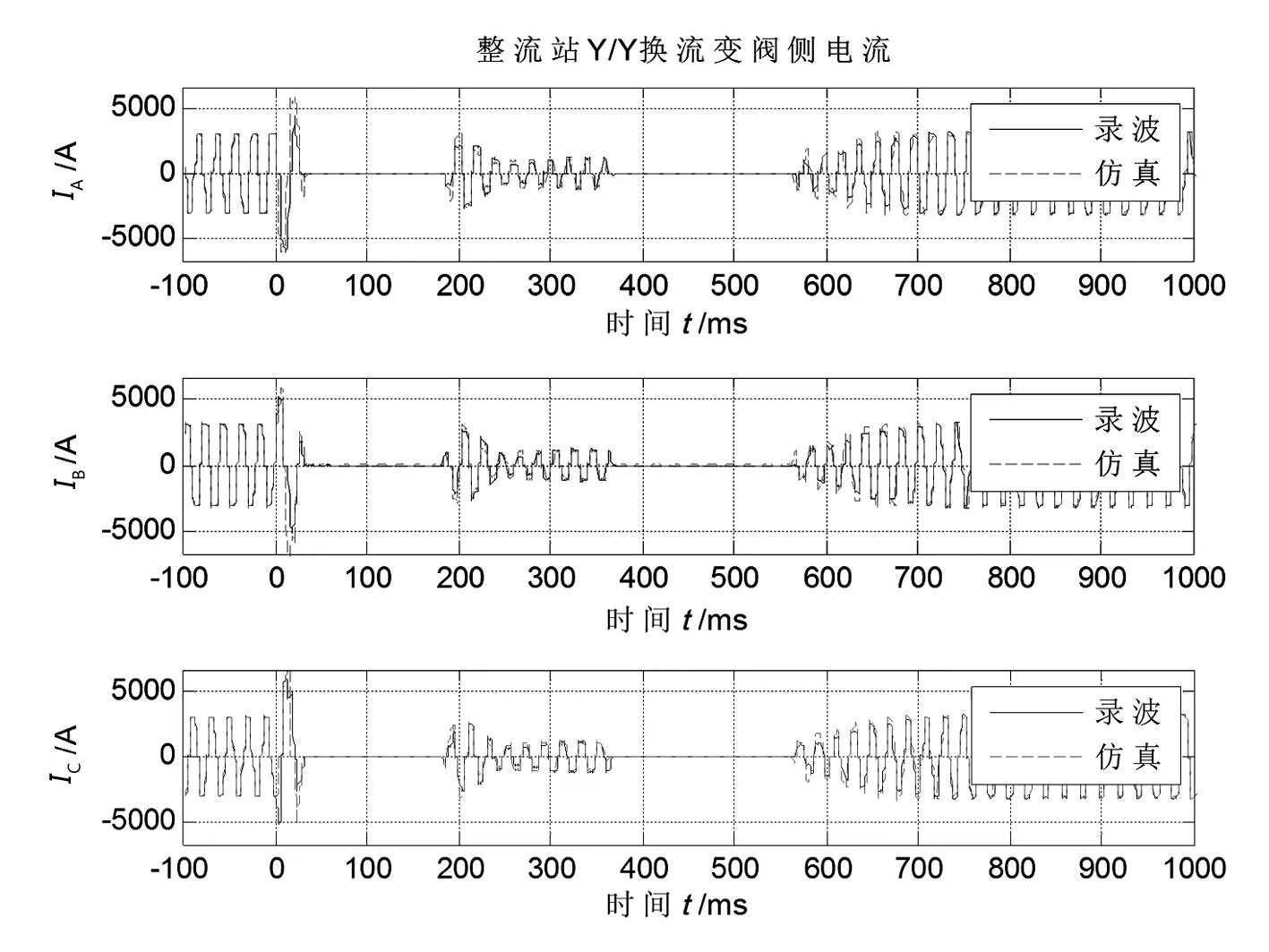
图8 整流侧极ⅡY/Y换流变压器阀侧电流波形对比图
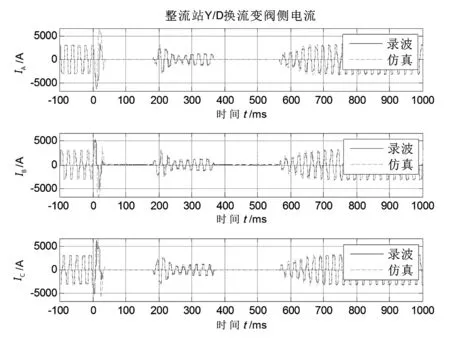
图9 整流侧极ⅡY/D换流变压器阀侧电流波形对比图
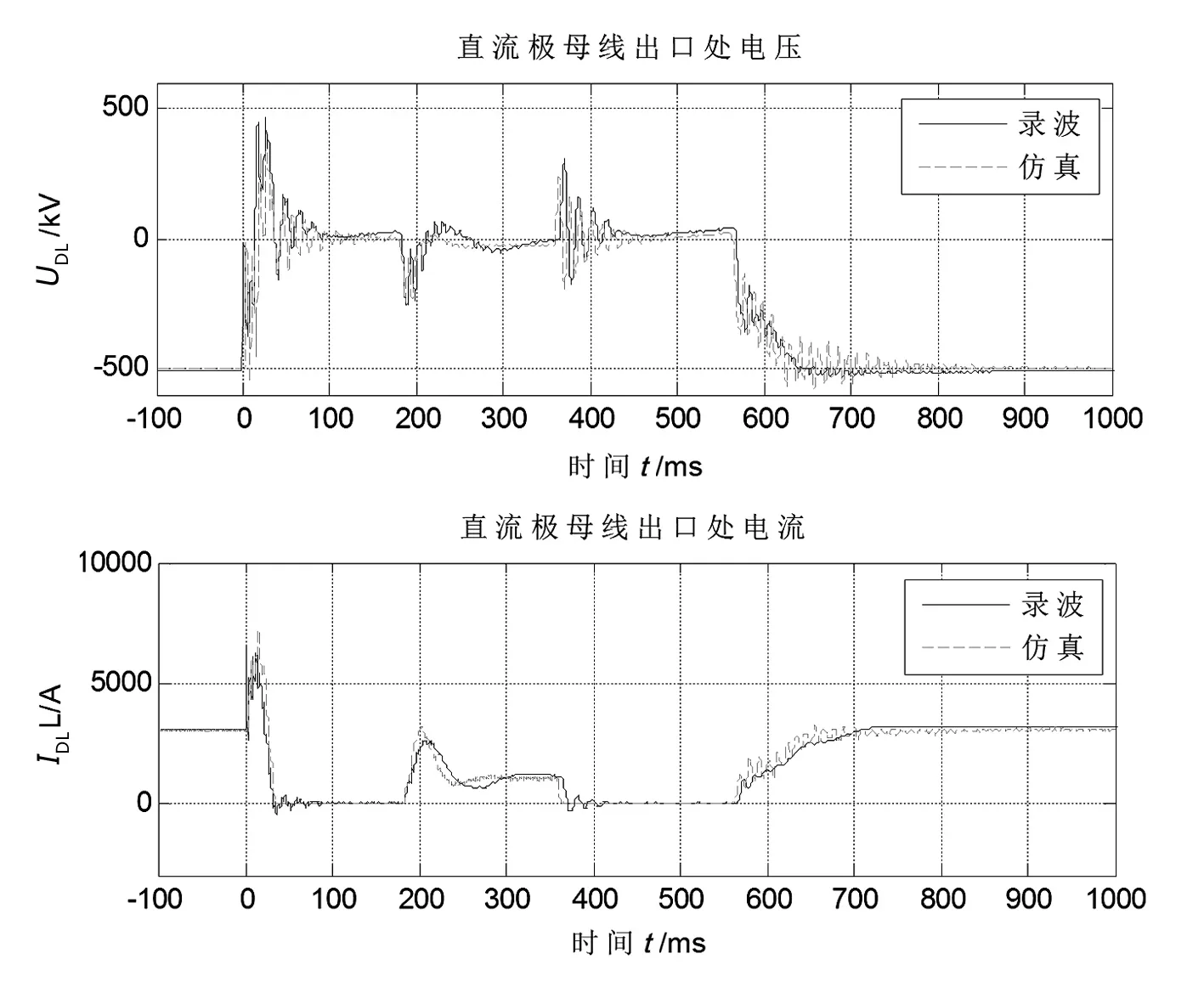
图10 直流线路电压、电流波形
由图8、图9可知,换流变压器阀侧电流的ADPSS仿真结果与实际故障录波相比,故障前后电流波形趋势相一致并且数值偏差不大。
2) 直流线路电压、电流波形和触发角波形
结合图10、图11分析可知,直流线路电压、电流以及触发角指令的仿真波形和实际故障录波波形三者趋势相一致,数值偏差较小。
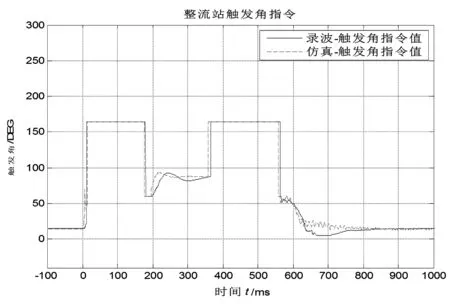
图11 整流站触发角指令
3.4 仿真速度测试
比较融合仿真系统(复杂直流控制保护和ADPSS平台)和非融合仿真方法(在ADPSS仿真平台中搭建详细的控制保护逻辑)的仿真速度,融合仿真平台运行在Intel Xeon 机架式服务器上,ADPSS电磁仿真的仿真步长为50 μs。多次测试中的仿真时间为:1 s、2 s、10 s和100 s,测试结果如表2所示。
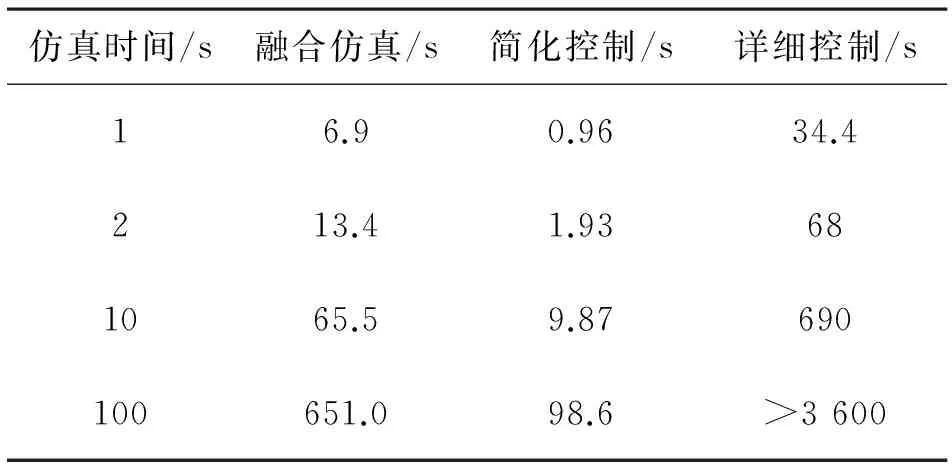
表2 仿真速度测试
4 结 论
1)研究了复杂直流输电控制保护系统与ADPSS电力系统的融合仿真技术,包括基于静态链接的融合仿真和动态链接的融合仿真。
静态链接的融合仿真是传统的融合方法,其加载速度快,但是灵活性差,资源占用大。动态链接的融合仿真系统采用延迟加载,动态调用的方法,模块
独立性强,灵活度高,适宜于实现复杂直流输电控制保护系统和ADPSS融合仿真。
2)研究了复杂直流输电控制保护系统与ADPSS融合仿真的同步机制。融合系统需要同步相对时钟,同步输入输出信号,特殊的同步调度执行。
3)复杂直流输电控制保护系统与ADPSS融合仿真在仿真准确性与实际现场工程基本吻合,仿真速度优于详细逻辑模型,可满足各种测试和研究。
[1] 李新年,易俊,李柏青,等. 直流输电系统换相失败仿真分析及运行情况统计[J]. 电网技术,2012(6):266-271.
[2] 王俊生,吴林平,王振曦,等. 高压直流控制保护系统IEC 61850建模[J]. 电力系统自动化,2009(1):41-44.
[3] 汤涌. 交直流电力系统多时间尺度全过程仿真和建模研究新进展[J]. 电网技术,2009(16):1-8.
[4] 韩民晓,丁辉,陈修宇,等. 高压直流输电系统电磁暂态建模[J]. 电力系统及其自动化学报,2008(4):7-11.
[5] 杨泽明,任达勇. 基于EMTDC混合编程的高压直流线路保护仿真研究[J]. 南方电网技术,2009(S1):80-83.
[6] 余江,周红阳,黄佳胤,等. 南方电网高压直流保护的PSCAD/EMTDC仿真模型研究[J]. 南方电网技术,2007(2):31-35.
[7] 穆清. 基于EMTDC的高压直流控制保护模型的研究和开发[D].北京:中国电力科学研究院,2010.
With the increase of scale and rates of HVDC transmission system as well as its impact on power system operation, the complicated HVDC control and protection characteristics attract more attention. The fusion simulation of the complicated HVDC control and protection system is studied. The static links and dynamic links as two fusion simulation methods are proposed, while the multiple interfaces of fusion simulation are designed based on each simulation method. Finally, the fusion simulation system of the complicated HVDC control and protection system and ADPSS is built, which remains accurate characteristics of HVDC control and protection to support the study on HVDC operating condition during various disturbances.
HVDC; HVDC control and protection system; fusion simulation; interface for fusion simulation
TM73
A
1003-6954(2017)01-0003-06
2016-10-18)
穆 清 (1983),博士,主要研究方向为高压直流输电和电力电子仿真;
张 星 (1982),博士,主要研究方向为电力系统仿真和电力电子仿真;
孙丽香 (1983),硕士,主要研究方向为电力系统仿真和电力电子仿真。
猜你喜欢
云南画报(2021年8期)2021-11-13
大电机技术(2021年5期)2021-11-04
北京航空航天大学学报(2021年6期)2021-07-20
电子制作(2018年14期)2018-08-21
通信电源技术(2018年3期)2018-06-26
湖北电力(2016年8期)2016-05-09
湖北电力(2016年8期)2016-05-09
电网与清洁能源(2015年5期)2015-12-29
电子设计工程(2015年15期)2015-02-27
中国铁道科学(2014年6期)2014-06-21