
蛙人探测声呐发展现状及关键技术*
2017-04-07 04:54倪小清夏红梅
舰船电子工程 2017年3期
徐 瑜 倪小清 夏红梅 杨 鹏
(海军陆战学院训练部 广州 510430)
蛙人探测声呐发展现状及关键技术*
徐 瑜 倪小清 夏红梅 杨 鹏
(海军陆战学院训练部 广州 510430)
蛙人探测声呐的建设与发展是反蛙人装备体系建设中的一个非常重要的环节。论文首先通过分析蛙人声散射特性和被动声学特性阐述了蛙人探测声呐工作的物理基础;其次,分析了国内外蛙人探测声呐发展的现状,并就当前蛙人探测声呐系统的关键技术及解决方案进行了展望。
蛙人探测声呐; 蛙人声学特性; 抗混响; 目标跟踪与识别
1 引言
蛙人,即人们俗称的“水鬼”,是各国军队中最精锐,也是最神秘的部队,具有隐蔽性好、突袭机动等优点,已逐渐显示其应用于“非对称战略”的优越性。特别是随着现代科学技术的迅速发展,各种水下蛙人装备不断推陈出新,对海军的水面舰艇、军用港口、码头和军事设施等造成了严重威胁。例如,1964年越南蛙人用磁性水雷炸沉美国“卡德”号航母;1994年哈马斯组织派遣蛙人袭击以色列一处海岸岗哨站;2008年泰米尔猛虎组织的海虎突击队员突破层层防护使用一枚水下炸弹炸伤了一艘斯里兰卡海军的军舰等。这样的例子还有很多。为了对付这种日益增加的威胁,世界各海军国家近年来加大了对发展新型反蛙人装备的研制和开发工作,一批新型的反蛙人装备纷纷问世。其中,反蛙人水声探测装备的建设与发展又是反蛙人装备体系建设中的一个非常重要的环节。因此,对于水下蛙人的声学特性、反蛙人水声探测装备的工作原理和发展现状以及反蛙人水声探测装备的关键技术进行深入分析研究,可为我海军发展反蛙人水声探测装备提供参考,具有重要的军事意义和军事实用价值。
2 蛙人声学特性分析
2.1 蛙人声散射特性分析
蛙人散射特性的研究是蛙人探测声呐信号处理技术研究的重点领域,国内外研究机构已经进行了一系列相关研究。蛙人目标不同于水雷、舰船等现有声呐设备针对的目标,其目标散射特性在不同频率时具有不同的特点。目前对蛙人声散射特性的研究,主要是采用水池试验和海上试验的方式进行,通过实采数据进行分析研究[1~5]。例如,Houston通过水池实验,测量了不同频率蛙人携带氧气瓶的目标强度,从实验结果可以看出,在20kHz以上,目标强度较大。Hollett给出了100kHz时蛙人目标散射回波强度的海上测量结果,闭式呼吸器蛙人目标强度仅有-20dB~-25dB,开式呼吸器蛙人呼出气泡的强度约为-15dB。大连测控技术研究所张波等通过码头试验[2~3],测得了75kHz频率下蛙人目标强度,其中开式呼吸情况下对目标回波贡献最大的气泡群目标强度大于-16.9dB,干式潜水服目标强度测量值约为-17dB,开式呼吸用呼吸气瓶目标强度约为-24dB,而蛙人目标强度约为-27.2dB;如果蛙人穿湿式潜水服,采用闭式呼吸,蛙人目标强度会大大减小,小于-25dB。这些理论与实验研究基本确立了蛙人散射模型的基本理论。
2.2 蛙人被动声学特性分析
相对于主动探测技术,水下蛙人的被动探测技术研究较少[6]。例如,美国Stevens理工学院海洋安全实验室的研究人员系统地研究了开式呼吸器辐射的声信号以及利用它探测水下蛙人目标的原理[1],做了大量的相关实验,并得到了一些重要结果。他们认为,蛙人水下呼吸辐射声信号主要是由呼吸调节器的一级头(高压阀)和二级头(低压阀)引起的,这种声信号随着蛙人的呼吸频率表现出周期性特征,并利用这种特征探测、定位水下入侵蛙人。国内的中科院声学所亦对蛙人辐射噪声特性开展了卓有成效的研究,通过水池实验获取了大量蛙人辐射噪声数据,并进行了特征分析。图1所示为中科院声学所某次实验与所获取的蛙人辐射噪声信号图。通过对蛙人辐射噪声信号分析可知水下蛙人辐射声信号的两个基本特征:一是蛙人吸气和呼气均辐射声信号,吸气时辐射的声信号频率较高,而呼气时辐射的声信号频率较低,能量较小,不利于对蛙人的被动探测;二是蛙人呼吸时产生的高频信号成分的能量远大于环境噪声的能量,信噪比较高,且具有明显的周期性。简单地说,实际采集的蛙人呼吸声信号主要由高频信号成分组成。

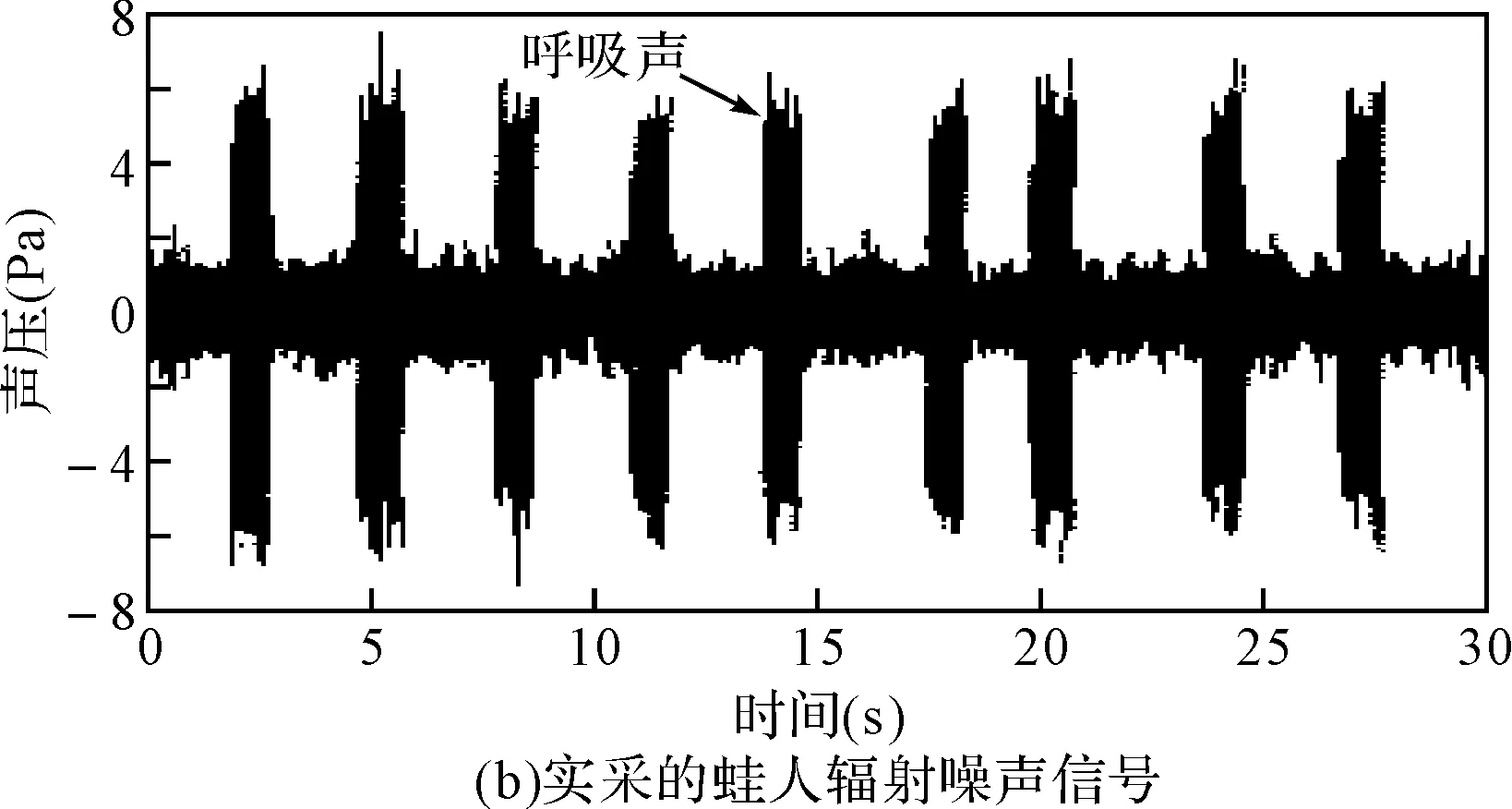
图1 水池实验与实采蛙人辐射噪声信号
3 蛙人探测声呐发展现状
目前,国内外对蛙人主要采用的是主动方式进行探测,采用被动方式探测蛙人仍然处于实验研究阶段。随着现代声呐技术的发展和进步,新一代声呐具有更先进的探测性能和更远的探测距离,一些高科技声呐还具有相当高的分辨率,能够认识蛙人和可疑水下航行体。下面以各主要军事强国为例,简要介绍一下各国蛙人探测声呐的发展状况[7~10]。
美国海军应用的“冥府守门狗360”具备自动探测、分类和跟踪水下威胁的功能,该系统的声呐单元能在800m范围内对蛙人进行探测,并且可以在水下500m距离内识别出人类所特有的胸腔。该系统的一个独立单元就可以覆盖360°范围,这些声呐单元可以悬挂在船舷两侧为舰船提供保护,也可以把许多单元部署在海床上,形成一道警戒线,保护海港和航道的安全。根据这种布放方式,使系统的侦察范围延伸到了1km之外。
英国的手持式蛙人侦查系统(DRS)能够在100m深度工作,DRS系统的探测主传感器是一部前视高频(500kHz)电子扫描声呐,一般情况下该声呐能够在230m距离上探测到一个-25dB的目标,导航系统采用长基线主动声学发射方式,通过该技术,导航误差可以控制在0.5m,最大导航距离可达1200m。
以色列的蛙人探测声呐(DDS)是一款能远距离探测闭式呼吸蛙人的可靠系统[9],可以在强烈的海洋噪音和水生物混响条件下保持最低的虚警率,平均一周只有一次左右。对于一个携带闭式呼吸装置的蛙人,DDS最小的探测距离达到700m,可以为警卫人员至少提供15min~20min的反应时间,以阻止蛙人入侵。对于动静更大、使用开放式呼吸器的蛙人,DDS的探测距离达到1000m~1200m。对于有动力系统的蛙人运载器(SDV),因为有更大的噪音信号传递,DDS的探测距离能够延伸1400m~2000m。
加拿大C-TECH公司生产的CSDS-85是其生产研制的第3代蛙人探测声呐,工作频率为80kHz,探测范围在250m、500m、1000m、1500m、2000m,档位可选,且具有360o水域全向监视或扇面监视范围,可选垂直面内波束倾斜控制。
俄罗斯、乌克兰的MOK-A水声系统是主动发射的海洋警戒装置,用于检测非法进入的潜水器、蛙人及水面运载器等。该系统采用匹配场设计原理,最大的特点是可以探测带吸声材料的隐身蛙人,探测距离达100m左右。
国内对蛙人探测声呐的研究是近几年来才逐渐展开的。首先开展蛙人探测声呐研制的是中科院声学所。中国和乌克兰共同研制的TRONKA声呐已在乌克兰获得专利,在第聂伯河及黑海都进行了试验,产品已经定型,应用前景广泛。2008年,该系统在青岛奥帆赛的水下安保中得到了成功应用。2010年,上海船舶运输科学研究所与中国科学院声学所联合研发生产的2010型反蛙人探测声呐,该声呐系统覆盖范围从90°升级为180°,工作频率为70kHz,宽带滤波器带宽为10kHz,有CW以及线性调频LFM两种信号形式,带宽从4kHz~20kHz不等,能很好地调节分辨率与作用距离的关系,达到较好的状态。为了很好地匹配水下复杂地形,它还能调节垂直相控发射,最大调节为±15°。在混浊水域条件下能有效探测水下危险目标,探测距离大于200m(清澈水域探测距离达到500m以上),并能够进行自动跟踪识别,当入侵目标进入有效探测区域时立即给出报警。此外,该声呐实现了多台声呐之间的同步工作,能有效抑制相互之间的影响以及各种干扰,达到更大探测范围的需求。
4 蛙人探测声呐关键技术
4.1 前端阵列技术
蛙人探测声呐基阵有多种形式可选择[12],若采用平面接收阵,搜索扇面最多可达90°,但无法和弧形发射阵共用阵元;若采用弧形接收阵,理论上警戒扇面可扩展至360°,且提供了和发射阵共用阵元的可能性。目前,国外的蛙人探测声呐设计上,普遍采用柱面阵,也有部分设计采用收发分置的方式,甚至采用接收线列阵的阵列技术,接收阵形的选择必须兼顾波束形成以及单机实现的可行性。对于换能器阵元的选择而言,最新的换能器多采用压电高分子材料PVDF薄膜或者复合换能器,利用其压电常数大、频带宽、柔软、耐力学冲击、声阻抗易匹配、密度小等特点,适用于灵敏的带宽接收换能器。
4.2 抗混响技术
由于蛙人目标强度小,通常在近岸浅海区域附近执行任务,海面混响较强,加大了从蛙人回波信号中进行目标检测的难度。要提高蛙人声呐作用距离,降低虚警率,首先就得提高信混比。通常从两个方面考虑以减小混响影响[9,12]:一是从信号形式和系统设计角度进行改进;二是在信号处理方面抑制混响来提高信混比。
1) 从信号形式和系统设计角度进行改进。最初蛙人探测声呐采用CW信号,CW信号的脉冲宽度决定了距离分辨率,信号脉冲宽度越大虽然能得到更大的探测距离,但是脉宽过宽又会影响到距离分辨率。因此,为了解决探测距离与分辨率这一对矛盾,改善信混比,信号形式可采用宽带信号。它的距离分辨率由带宽决定,通过发射长脉冲来改善信混比,同时在不减少距离分辨力的基础上探测更远距离的目标。
2) 从信号处理方面入手。在输入信混比一定的情况下,通过抑制混响和背景噪声来提高输出信噪比。为了更有效地对小目标进行检测,需要在信号处理上采用一系列的方法来进行背景平稳化,使蛙人回波声图像显示更为精细。可以通过阵元域信号处理、波束形成等技术使生成的多波束声图像更加清晰,也可以通过对多波束声图像进行二次处理的方式,提高输出信噪比。
4.3 目标自动跟踪和识别技术
目标自动跟踪与识别是反蛙人声呐技术发展的关键点和难点[4,9,12]。其中的核心技术是如何将蛙人、舰船目标、海洋背景(海面、海底等)、大型鱼类等目标进行区分。目前,各国的蛙人探测声呐都具有一定的自动跟踪和识别能力。可在操作者干预和最终决定的情况下,提供自动目标分类,不仅可将目标与海洋背景等区分开来,还可进一步分离目标类型(如携带呼吸器的蛙人、蛙人运载器、舰船等)。为实现混响背景下的运动目标自动跟踪和识别,国内最新声呐运用的是动静目标分离的处理方法,即利用蛙人、舰船等是运动目标,背景属于静止目标的特点,对相邻周期生成的多帧声图像,运用动静分离算法,即把图像信息分离为运动图像与静态目标图像,完成运动目标的提取和检测。对于水面舰船目标,由于在接收信号频段内,每个时刻都可以收到舰船辐射的连续谱噪声。因此,可进一步利用这一特征来识别水面舰船目标;但是,对于蛙人、水下机器人、大型鱼类等特征相近的目标,还需要在操作者干预的情况下来进行分离。
5 结语
蛙人水声探测装备作为对水下蛙人等目标最有效的探测技术,是当前声呐装备中的研发重点,由近岸浅海环境及海洋混响的复杂性,使其集成了当前声呐发展的众多全新软硬件技术和算法。国外相关机构针对蛙人探测声呐技术发展,展开了大量的研究和实验,国内蛙人探测技术虽然开展时间不长,但也取得了很大的进展。蛙人探测声呐研制的关键技术是在低信混比条件下有效检测目标,在保证目标分辨率的情况下得到较远的探测距离,以达到较广的监控范围以及较长的预警时间。随着蛙人目标特征数据库、新型波束形成技术和换能器技术的进一步发展,蛙人探测声呐也将呈现全新的发展面貌和水平。
[1] 欧阳文, 朱卫国. 蛙人探测声呐系统研究进展[J].国防科技,2012(6):53-57.
[2] 张波,刘文章.蛙人回波建模与实验研究[J].应用声学,2010,29(4):313-320.
[3] 张波,陈小泉.蛙人探测及蛙人探测声呐[J].中国科技信息,2009(2):51-52.
[4] 蒋立军,杨娟,许枫.蛙人探测声呐技术研究进展[J].科学通报,2009,54(3):269-272.
[5] Hollett R. D., Kessel R. T., Pinto M.. At-Sea Measurements of Diver Target Strengths at 100 kHz: Mearsurements Technique and First Results[C]//UDT Conference Preceedings, 2006: 146-152.
[6] 张伟豪,许枫.水下蛙人被动探测技术实验研究[J].声学学报,2012,37(3):301-307.
[7] 张颖,孙继昌,郭威.蛙人探测声呐系统在奥帆赛中的应用[J].气象水文海洋仪器,2008(3):47-50.
[8] 张颖,孙继昌,张颖颖,等.TRONKA声呐系统在蛙人探测中的应用研究[J].海洋技术,2008,27(2):92-95.
[9] 尹凯华.蛙人探测声呐在水下安保的技术实现[J].上海船舶运输科学研究所学报,2011,34(1):71-75.
[10] 胡明军.蛙人探测声呐的现状及发展趋势[J].四川兵工学报,2010,31(1):36-37.
[11] 易华君.日益发展的反蛙人装备[J].水雷战与舰船防护,2006(4):61-65.
[12] 张彦敏,佟盛.蛙人探测声呐系统关键技术论证[J].舰船科学技术,2010,32(2):44-47.
Current Status of Diver Detection Sonar and Key Technologies
XU Yu NI Xiaoqing XIA Hongmei YANG Peng
(Department of Training, Naval Marine Academy, Guangzhou 510430)
Development and construction of diver detection sonar is an important part in anti-diver equipment system construction. Firstly, the physic base of diver detection sonar working mechanism is analyzed based on the introduction of diver active and passive acoustic characteristics. Secondly, the current status of diver detection sonar at home and abroad is analyzed, and the current key technologies and solution of diver sonar system is also summarized.
diver detection sonar, diver acoustic characteristics, anti-reverberation, target tracking and recognition
U666.7
2016年9月3日,
2016年10月14日
徐瑜,男,博士,讲师,研究方向:数学建模与计算机仿真。倪小清,男,博士,讲师,研究方向:数学建模与计算机仿真。夏红梅,女,硕士,讲师,研究方向:数学建模与计算机仿真。杨鹏,男,博士,副教授,研究方向:信号与信息处理、数学建模与计算机仿真。
U666.7
10.3969/j.issn.1672-9730.2017.03.001
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
小哥白尼(军事科学)(2022年5期)2022-08-17
舰船科学技术(2022年11期)2022-07-15
海军航空大学学报(2019年1期)2019-04-29
小学生导刊(2018年34期)2018-12-18
小学科学(2017年9期)2017-09-20
山东青年(2016年3期)2016-02-28
母子健康(2015年1期)2015-02-28
延河(下半月)(2014年3期)2014-02-28
