
采用不变矩图像匹配与直方图的仪表识别算法
2017-04-07 08:03周戈曾智
华侨大学学报(自然科学版) 2017年2期
周戈, 曾智
(1. 重庆青年职业技术学院 信息工程系, 重庆 400712;2. 中国科学院 自动化研究所, 北京 100190)

采用不变矩图像匹配与直方图的仪表识别算法
周戈1, 曾智2
(1. 重庆青年职业技术学院 信息工程系, 重庆 400712;2. 中国科学院 自动化研究所, 北京 100190)
为了解决当前仪表识别算法在机床仪表状态信号多变、实时性强的环境下状态识别错误的不足,设计一种基于不变矩图像匹配与直方图的在线仪表识别算法.首先,基于不变矩特征,通过图像的重心坐标获取其中心不变矩,设计图像匹配算子,并根据仪表灯的匹配度量值定位当前状态信号位置.然后,根据定位到的信号中心点坐标,提取出状态信号外接最小矩形.最后,依据信号灯颜色的直方图特性,计算出反投影直方图,实现对状态信号颜色的判断.实验结果表明:与当前机床仪表识别技术相比,面对机床仪表状态信号多变的环境时,文中算法具有更高的识别精度. 关键词: 机床仪表; 识别算法; 不变矩; 直方图; 图像匹配; 反投影
随着制造业的转型,制造已逐步趋向无人化、智能化、物联网化[1].机床作为产品与零部件加工的必备介质,在机械工程领域得到广泛使用.几乎所有的机床都带有仪表,实时显示机床状态.因此, 对于机床仪表情况的实时掌握,直接决定机床的生产质量[2].以往,国内很多厂家安排人力进行机床仪表的掌控,但是人力成本高,且不可避免地存在主观影响.为了改善这一不足,诸多厂商引入机器视觉实现仪表状态识别,在一定程度上提高了仪表状态识别的精度和效率.然而,当仪表实时变化速度较快时,其识别精度较低[3-4].对此,研究人员开始将图像处理技术引入机床仪表识别中,取得了一定成果[5-6].为了提高机床仪表状态识别算法的适应性,本文提出基于不变矩图像匹配与直方图的机床仪表识别算法.
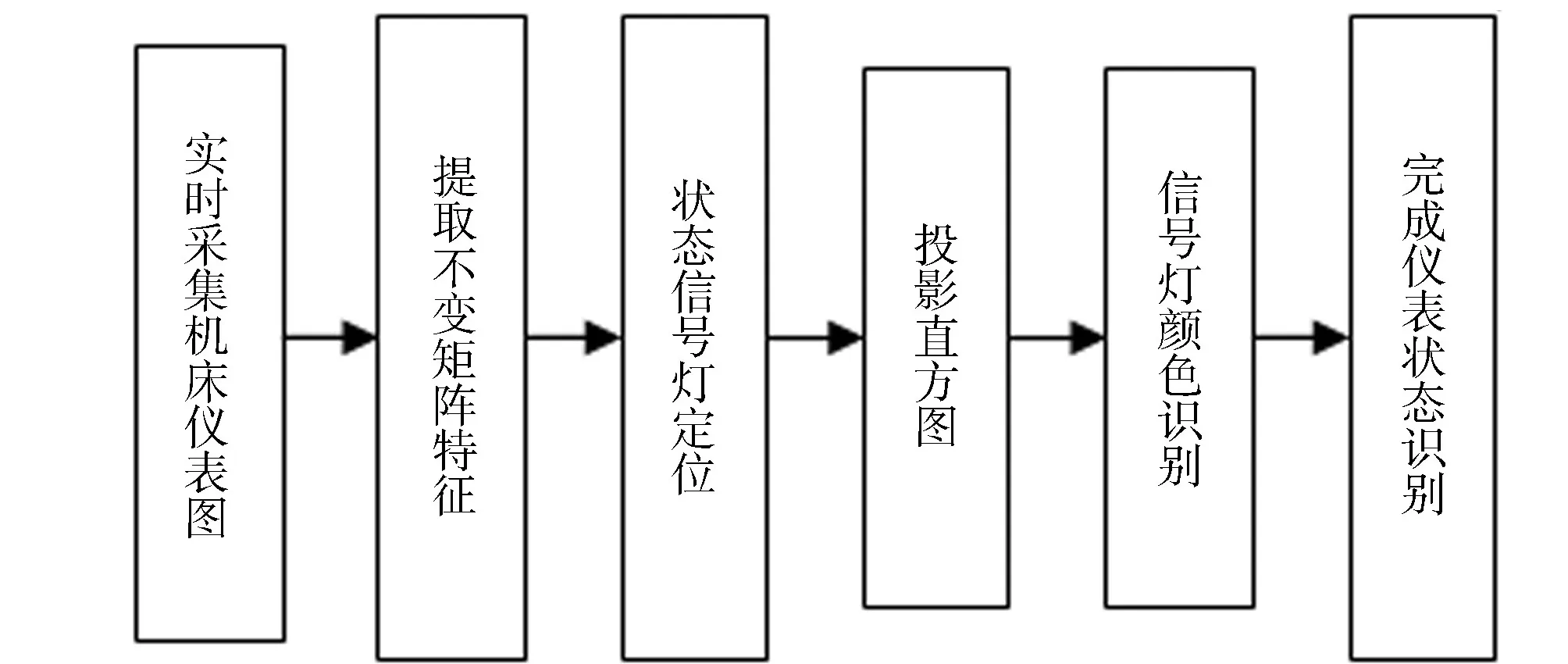
图1 机床识别算法流程 Fig.1 Process of machine identification algorithm
1 机床仪表识别算法
机床仪表识别算法流程,如图1所示.该算法的目的是在仪表状态信号灯位置多变且变换频率较快的条件下,对机床信号进行精确识别.首先,对仪表状态显示屏幕进行实时图像采集;然后,基于不变矩特征设计图像匹配算子,并提取不变矩特征,克服状态信号灯位置实时多变的干扰,完成对状态信号灯的定位;最后,计算信号颜色的投影直方图,完成信号灯颜色的稳定识别.
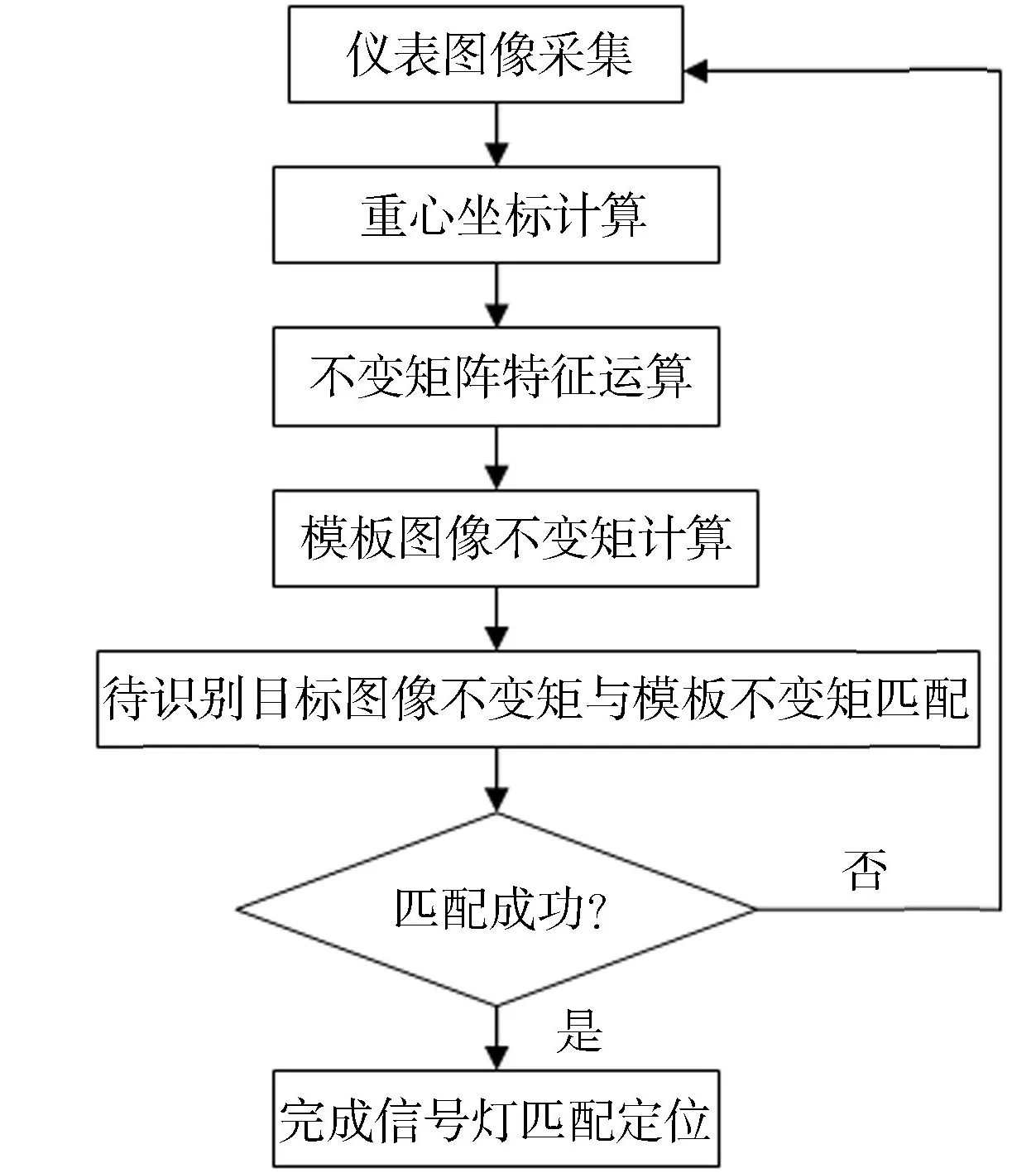
图2 基于不变矩的图像匹配过程Fig.2 Image matching process based on invariant moments
1.1 基于不变矩的图像匹配
由于机床作业环境通常是在生产车间,工作环境比较恶劣,光源多变,从而影响图像灰度的稳定性,且状态信号灯实时多变,导致基于灰度信息的定位算法效果不佳,尤其是在车间非线性的光照变化条件下,识别难度较大.
文中采用基于不变矩特征的图像目标匹配算子实现匹配,过程如图2所示.由于特征点的匹配度量值对位置的变化比较敏感,因此,该技术可有效提高匹配精度[7-8].由于高阶矩对噪声和变形非常敏感,故选用低阶矩实现图像目标匹配[9],即
式中:p,q可取所有正整数;p+q为矩的阶;f为图像函数.

以重心为原点,计算疑似信号灯的待匹配区域图像中心不变矩,可得

(a) 原图 (b) 轮廓图 (c) 定位匹配图图3 文中算法的定位匹配效果Fig.3 Positioning matching effect of this algorithm

图4 信号灯判断过程Fig.4 Judgment process of signal lamp
1.2 基于投影直方图的颜色识别
信号灯位置定位后,为了识别信号灯状态,需先识别信号灯颜色.机床信号灯有灰色、绿色和红色3种颜色,分别代表不工作状态、正常工作和异常工作.在机床实际作业中,信号灯不但位置变换快,而且状态颜色切换也实时多变.在这种情况下,普通基于像素整体信息分析的颜色识别算法,无法有效排除实时多变的不稳定干扰,会导致颜色识别的失误.
由于图像直方图是图像各灰度值统计特性与图像灰度值之间的函数,它统计了一幅图像中各个灰度级出现的次数或概率[10].这种以一定区域全局整体灰度概率体现的特征比局部像素极值更具有稳定性.因此,通过计算信号灯颜色的直方图,可实现对状态信号颜色的判断,其过程如图4所示.依据文献[10]可知,图像直方图计算公式为
式中:N为图像像素总数;nk为第k级灰度的像素数;rk为第k个灰度级;P为该灰度级出现的概率.
由上式可知:直方图提供了图像整体灰度值的分布情况和整体描述[11].待处理图A,B,如图5所示.灰色信号灯与绿色信号灯和红色信号灯的直方图计算结果,如图6所示.由图6可知:灰灯分布在整个灰度范围,集中在两端;绿灯分布在灰度50以上,集中在中间;红灯分布在整个灰度范围,集中在中间.由此可知:灰、绿、红的直方图有各自的特点,文中算法根据此特性,对仪表完成识别.

(a) 待处理图A (b) 待处理图B (a) 灰灯 (b) 绿灯 (b) 红灯 图5 待处理图 图6 直方图计算结果 Fig.5 Image to be processed Fig.6 Calculation results of histogram
2 实验与讨论
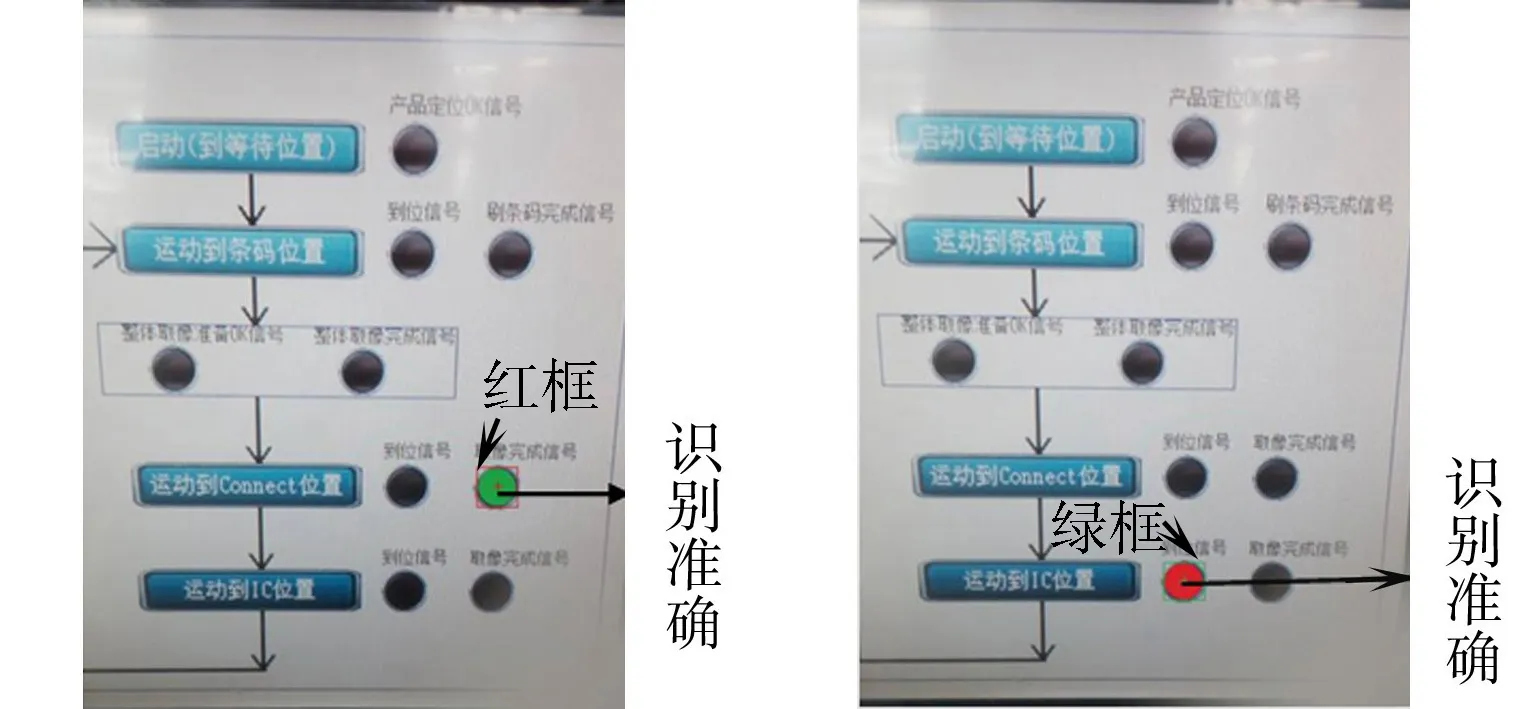
(a) 对应待处理图A (b) 对应待处理图B图7 文中算法的定位识别结果Fig.7 Location identification graph of this algorithm
为了体现文中算法的优势,将文献[5]设为对照组,机床仪表信号变化频率为0.5 次·s-1,即每2 s仪表刷新一次信号状态.采用VS 2015开发平台验证所提技术与文献[5]算法的识别精度.通过文中算法对图5的待识别图像A,B进行识别处理,结果如图7所示.部分实验参数:信号灯不变矩归一化值为0.8;标准匹配度为0.89;信号红色标准为200;信号绿色标准为150.

(a) 对应待处理图A (b) 对应待处理图B图8 文献[5]技术的定位识别结果Fig.8 Location identification graph of reference [5]
由于所提技术引入不变矩特征,定义相应的匹配算子,使其具有较好的平移旋转不变性,且信号灯的灰度变化不敏感,精确定位出信号灯位置,如图7(a)所示.由信号灯颜色的直方图特性,计算其反投影直方图,对其完成精确识别,如图7(b)所示.由图7可知:文中算法准确定位出当前信号灯位置,并以不同颜色标注出来(红框定位绿色信号灯,绿框定位注红色信号灯),有效克服了实时多变的不稳定干扰,完成仪表状态信号灯的监控识别.
利用文献[5]算法对图5的待识别图像A,B进行识别处理,结果如图8所示.因为文献[5]算法是通过加入移动检测,确定是否需要在下次识别中进行重定位,实现信号灯识别的目的,但是该技术依靠预先设定的感兴趣区域,缺乏动态自适应性.当机床信号灯多变时,因人工设定的感兴趣区域难以实时动态依据信号灯的状态变化定位,导致仪表识别失误.

图9 不同变换次数条件下的信号灯识别结果Fig.9 Signal lamp recognition results under different transformation times
为了量化文中算法的稳定性,对不同指示灯变化次数情况下的识别率进行测试.当机床仪表信号的变化频率为0.5 次·s-1,测试结果如图9所示.由图9可知:随着仪表信号变化次数(n)的增加,文中算法的稳定性较好,其识别正确率(η)稳定保持97%左右;对照组技术的识别率随仪表信号变化次数增加,其精度逐渐下降,最终稳定在75%左右.因此,文中算法的识别精度与稳定性优于对照组.
3 结束语
为了解决仪表状态信号灯实时多变,且光照不稳定环境下状态信号识别不准的问题,设计基于不变矩特征图像匹配定位与直方图颜色识别的仪表信号识别算法,实现对机床仪表状态信号灯的定位、颜色识别.与当前机床仪表状态信号识别技术相比,在面对现场环境的识别失误时,文中方法具有更好的精度和稳定性,为机床仪表状态无人值守监控提供了技术保障.
[1] 李红卫,杨东升,孙一兰.智能故障诊断技术研究综述与展望[J].计算机工程与设计,2013,34(2):632-637.
[2] 李学聪,汪仁煌,刘洪江.指针表刻度中心直线拟合方法研究 [J].计算机工程与设计,2012,33(7):2726-2729.
[3] HU Ying,LIU Guizhong.Instrument identification and pitch estimation in multi-timbre polyphonic musical signals based on probabilistic mixture model decomposition [J].Journal of Intelligent Information Systems, 2013,40(1):141-158.
[4] MEISTER H,LANDWEHR M,LANG-ROTH R.Examination of spectral timbre cues and musical instrument identification in cochlear implant recipients[J].Cochlear Implants International,2014,15(2):78-86.
[5] 于向阳.仪表监控识别系统中实时性和准确性的研究[J].光学技术,2015,17(32):427-430.
[6] 房桦,明志强,周云峰.一种适用于变电站巡检机器人的仪表识别算法[J].自动化与仪表,2013,11(5):246-249.
[7] SHAHRUL N Y,LAKHMI J.An insect classification analysis based on shape features using quality threshold ARTMAP and moment invariant[J].Applied Intelligence,2012,37(1):12-30.
[8] ZENG Jinle,ZOU Yirong,DU Dong.Research on a visual weld detection method based on invariant moment features[J].Industrial Robot,2015,42(2):117-128.
[9] 王亚林.嵌入式智能仪器仪表弱故障信号的有效检测[J].计算机仿真,2014,18(15):42-47.
[10] NIKOLOVA M,WEN Youwei,CHAN R.Exact histogram specification for digital images using a variational approach[J].Journal of Mathematical Imaging and Vision,2013,46(3):309-325.
[11] 何林远.基于计算机视觉的座舱仪表识别检测方法[J].中南大学学报(自然科学版),2014,23(2):271-276.
(责任编辑: 钱筠 英文审校: 吴逢铁)
Instrument Recognition Algorithm Using Invariant Moment Image Matching and Histogram
ZHOU Ge1, ZENG Zhi2
(1. Department of Information Engineering, Chongqing Youth Vocational and Technical College, Chongqing 400712, China;2. Institute of Automation, Chinese Academy of Sciences, Beijing 100190, China)
In order to solve the problem of failure to identify the instrument status in current instrument identification algorithm under the condition of the state signal of the machine instrument changing and the strong real-time performance, an online instrument recognition algorithm based on invariant moment image matching and histogram was designed. Firstly, image matching operator was designed by obtaining its center invariant moments with the condition through the gravity coordinates of image based on invariant moment feature, and the position of the current status signal was located according to the matching measure of the instrument light. Then the minimum rectangle of the state signal was extracted according to the coordinates of the center point of the signal, and finally, the back projection of histogram was calculated according to the characteristic of the color of the signal light obtaining the color judgment of status signal. The experimental results show that: this algorithm had a higher recognition accuracy facing the changing environment of the state signal of the machine tool compared with the current machine instrument identification technology. Keywords: machine instrument; recognition algorithm; invariant moment; histogram; image matching; back projection
10.11830/ISSN.1000-5013.201702017
2016-03-18
周戈(1978-),男,副教授,主要从事图像处理与目标识别、数据挖掘的研究.E-mail:cqzhouge511qn@sina.com.
重庆市科技攻关计划项目(2011CJ0782); 重庆市信息产业发展政策研究重点项目(K2011-52)
TP 391
A
1000-5013(2017)02-0225-04
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
微型电脑应用(2022年3期)2022-04-20
天津医科大学学报(2021年1期)2021-01-26
计算机应用(2020年11期)2020-11-30
安徽电子信息职业技术学院学报(2020年5期)2020-11-13
计算机与网络(2020年7期)2020-05-15
摄影之友(影像视觉)(2018年12期)2019-01-28
计算机测量与控制(2017年6期)2017-07-01
初中生世界·八年级(2017年3期)2017-03-24
中国新通信(2016年23期)2017-03-01
