基于信号强度与车辆速度的切换判决算法
2017-04-10 19:11宁珍妮
中国新通信 2017年4期
宁珍妮
【摘要】 本文提出了基于接收信号强度与车辆速度的切換判决算法,基于模糊逻辑控制利用速度大小得到动态迟滞参数,并联合接收信号接收强度作为新的触发切换请求的判断依据,并根据速度方向准确评估车辆运动趋势,确定目标基站,避免错误切换次数,减少了切换判决的时间。并搭建仿真平台,对算法性能进行评估。
【关键词】 车载网络 切换判决 迟滞参数 模糊逻辑
一、引言
切换是指用户处于移动状态时,可能会穿过不同小区的覆盖范围,为保证用户服务质量,无线承载由当前小区改为相邻小区的操作过程。切换机制作为无线网络移动性管理中非常重要的一个方面,其性能的优劣会直接影响用户的服务质量。日益发展的车联网系统对切换技术提出了更高的要求。由于车辆节点的高速移动性,对于低速用户适合的切换参数,对于处于高速行驶状态的车载用户来说,则很容易发生过晚切换(甚至无线链路失败)。传统的切换判决算法并不能完美地反映车辆的运动趋势,更不能适应车辆速度动态调整切换参数,在尽可能降低切换时延的基础上,提高切换成功率。
为了弥补传统切换判决算法上的不足,目前有很多研究都在其基础上做出了进一步的改进。在切换判决的过程中尽可能利用已知的用户信息,包括移动台的运动速度、运动方向、信号强度变化等,提高切换性能,改善用户体验。文献[1~2]是基于GPS辅助对切换算法进行改进,把相邻基站的直连线的中垂线作为小区边界,当移动台位置与边界的距离小于固定阀值时触发切换。然而实际情况中由于无线信道的剧烈变化,实用价值并不大;文献[3]是通过测量列车触发预承载时所在位置的统计平均值作为参考点,并根据列车移动状态信息,来降低切换失败率。文献[4]提出了基于速度估计的切换参数优化算法,在通过对移动速度进行低、中、高分级调节切换触发时间TTT,然而没有充分利用到移动台的位置信息。
为了获得切换更高的准确性和系统的更好性能,本文提出了基于接收信号强度与车辆速度的切换判决算法。通过GPS辅助,基于速度大小动态调整迟滞因子,联合信号接收强度引入新的触发切换请求的判断依据,在提高切换成功率的前提下,尽量减少“乒乓效应”;并根据车辆速度方向更准确的评估其运动趋势,避免错误切换次数,减少了切换判决的时间。
二、基于速率的迟滞因子动态调整
目前,3GPP TR 36.902技术规范已明确提出移动鲁棒性优化MRO可针对以下切换参数进行优化:触发时间(TTT),迟滞因子(Hyst),小区偏置参数(CIO),小区重选参数(CRS)。可见,用户的速度等级信息对MRO中切换优化有着较为直接的影响。接下来主要讨论迟滞参数对切换性能的影响。
传统切换算法是基于RSS固定切换迟滞参数,并延迟触发的A3切换算法。即满足式(1)时,触发切换判决。
RSSnew >RSSorigin+Hyst (1)
其中RSSnew 为目的基站接收信号强度,RSSorigin为服务小区信号接收强度,Hyst 为基于速度v大小的动态值。
但是在车载通信网络中,由于节点的高速移动性,传统切换算法下切换成功率有着明显的下降。本文将迟滞参数作为一个基于速率的动态值进行调整。当车辆高速行驶时,需要降低切换迟滞因子,进而提高车辆高速运行情境下的切换成功率;当车辆行驶缓慢时,则需要保持相对高的切换迟滞因子,保证车辆低速运行时乒乓切换事件频率较低。因此是一个关于速度v的减函数。
此时切换判决公式调整为如下:
由于信息有限以及无线网络的动态性,我们无法得到基于速度的准确建模。因此在这里引入模糊逻辑算法的概念。模糊逻辑算法无需了解被控对象的精确模型并且可以模拟人脑思维进行智能控制,根据车辆速率调整迟滞参数。在模糊逻辑系统设计中,主要分为以下三个部分:信息参数模糊化、规则库的建立、反模糊化。
(1)模糊化
在模糊化过程中,我们需要测量每个输入量,并根据每个输入的语言变量对应于模糊序列元素的隶属度,对模糊序列内的元素赋值,范围为0~1。车辆速度的隶属度函数如图1所示。车辆节点使用隶属函数计算车辆速度v输入因子对应的等级(Very Low,Low,Medium,High或Very High)分别对应车辆实际速度0km/h,30km/h,60km/h,90km/h,120km/h。隶属度函数可表示为: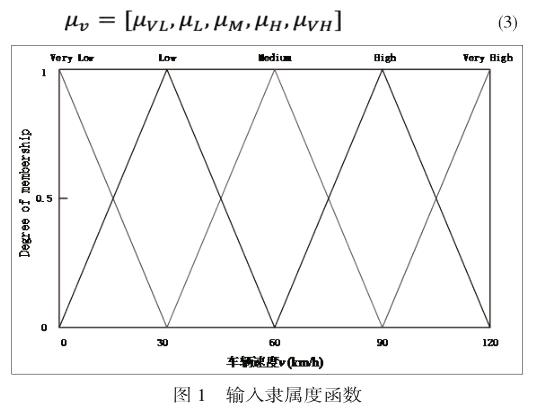
(2)规则库
基于车辆速度大小的模糊输入量,车辆节点可以使用如表1定义的规则库进行计算当前迟滞因子值。模糊逻辑控制中规则库均是根据专家经验或实践得出的。后续模糊逻辑推理就是参考模糊规则库,根据得到的输入量,给出系统所需要的控制量。
在规则库设定中,我们可以看到速度越高,设定的迟滞参数就越低,符合实际需求。
(3)反模糊化
反模糊化通过一个输出隶属度函数将得到的模糊集合转变为一个精确的数值,作为模糊逻辑控制系统最后的输出量。作为动态迟滞参数输出隶属函数,如图2。这里我们使用的重心法来进行反模糊化操作,如公式(4):
其中n为所有规则数,xi为模糊因子,H(xi)为动态迟滞参数的输出隶属函数。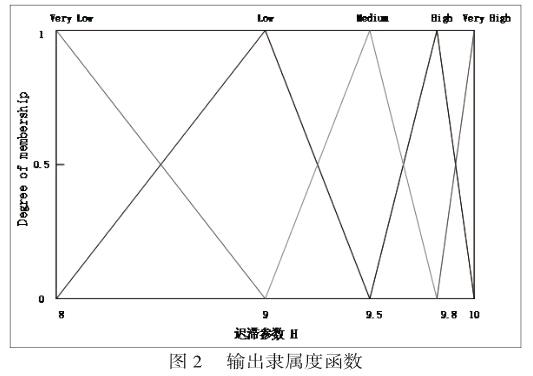
在设置输出隶属函数中,我们要考虑到,值必须在一个合理的范围,避免調整过度而导致“乒乓效应”。图2中输出隶属函数中不同等级下迟滞参数的值均是根据多次仿真得到在对应速度下最合适的取值。
三、切换判决算法流程
图3是某车辆在进行切换判决时的场景示意图。场景中用到的标号如下:x:此时正在进行切换判决的车辆;A:车辆即将离开的服务小区基站;RSSx,A:车辆x在服务小区A接收到的信号强度;B:车辆即将切换至的目的基站;RSSx,B:车辆x所处地点此时目的基站B的接收信号强度;v:车辆x此时的速度及其方向;ψ:车辆到小区基站A的直线方向与车辆速度v之间的夹角;θ:车辆到小区基站B的直线方向与车辆速度v之间的夹角;Hystv:基于速度模糊控制的动态迟滞参数;RSS_THRESHOLD:一个安全预警RSS,当车辆接收信号强度大于该值时不需要做进一步的切换判决。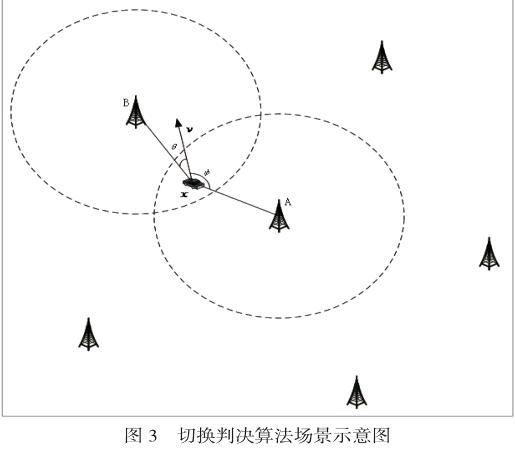

为了获得切换更高的准确性和系统的更好性能,通过GPS辅助,基于速度方向及大小引入新的触发切换请求的判断依据,提出信号强度和速度的切换算法机制。基于车辆速度的切换算法有两重含义:①算法基于车辆速度大小引入模糊逻辑控制,动态调整迟滞因子,提高切换成功率②根据车辆速度方向评估其运动趋势,更准确的判断车辆此时是否需要切换,节省传统切换算法中延迟触发时间,减少切换时延,且可以避免发生不必要的切换,合理减少切换次数,切换流程如图4所示。
算法具体步骤如下:
1、基站下发测量配置信息。在同频测量的测量对象列表中指定UE需要测量的小区(包括服务小区和邻近小区)。
2、当用户测量得到服务小区的接收信号强度低于设定的门限值RSS_THRESHOLD时,UE应向基站发送一个事件的测量报告。
3、当触发测量报告上报后,需要判断测量报告是否满足切换的触发条件。根据车辆速度基于模糊逻辑控制得到动态Hystv值,判断是否满足公式:
若满足条件,根据车辆速度方向确定其运动趋势为接近目的基站并远离原服务小区基站,即满足ψ>90°,θ<90°,这样可以避免车辆发生不必要的切换,减少切换次数。若确定切换,发出切换命令,若失败则重新接入,若成功则返回步骤1)。
四、仿真实验与分析
4.1 仿真场景及参数设置
仿真平台选用了Matlab搭建。场景我们参考了3GPP TR 36.885[5]中高速公路案例中建议的场景。如图5所示。具体的仿真参数如表3所示。
接收信号强度RSS计算公式如下:
RSS(d)dB= Pt-PL(d)- N0 (6)
Pt为基站发射功率,单位dBm,PL(d)为经过距离d后的路径损耗。N0 为高斯白噪声。
本文中的传播模型,采用的是3GPP TR 36.885[5]中定义的宏基站到用户终端UE的传播模型,如式(7)。
PL(d)dB=128.1+37.6log(d)+Xσ (7)
其中,d为基站到用户的距离,单位为km。Xσ是一个零均值,标准差为8dB的对数正态分布随机变量,单位为dB,表示阴影衰落。
为了与传统基于信号强度的切换判决算法进行比较,我们选取了切换成功率以及切换次数这两个指标来进行评估。我们通过检测切换过程中是否发生RLF判定切换是否成功。RLF的判定依据参照3GPP TS 36.330中的定义,在此不做赘述。

4.2 仿真结果分析
为了与传统纯基于接收信号强度的判决算法比较,我们对迟滞参数与延时触发时间结合的基于A3事件的切换算法进行仿真。其中传统机制迟滞参数设为4dB,延时触发时间为100ms。RSS的计算如式(6)并使用同样的参数。以下所有仿真数据均是1000次取平均值的结果。
图6展示了本文所提出的基于接收信号强度和车辆速度切换判决机制,传统切换判决算法在相同的环境下切换成功率的对比。我们可以看到传统切换判决算法切换成功率随速度的影响较大,在车辆速度60km/h~80km/h时切换成功率表现较好,但是在低速或高速行驶的情况下,切换率明显降低。而本文提出的基于信号强度与速度的切换判决算法随着速度变化切换成功率变化并不明显。这是由于本算法基于速率引入模糊控制算法,动态调整迟滞参数,适应不同车辆速度场景。
另外参考速度方向来更准确的判断目的基站以及是否需要切换,进一步减少不必要的切换,提高切换成功率。
图7展示了两种机制在相同的环境下切换次数的对比。从图中可看到,传统切换次数随着速度变化呈现减少的趋势,这是对于高速用户来说,迟滞参数过大,切换较难触发,切换次数虽然减少但同时切换成功率也在降低。
本文提出的算法在速度的变化下切换次数能保持很好的稳定性。相比传统算法,本文提出的算法引入了RSS预警门限,并且根据速度方向来辅助判决,尽量避免了不必要的切换。并基于车辆速度大小动态调整迟滞参数,使车辆在中低速运行时,维持了一个较低的乒乓切换事件;高速行驶过程中,保持较高的切换成功率,满足了车辆用户对越区切换的需求。
由于场景的限制,本文提出的算法在切换次数上改善数据并不显著,但在无线网络环境复杂的实际情况中,引入速度方向判决会体现更大的优势。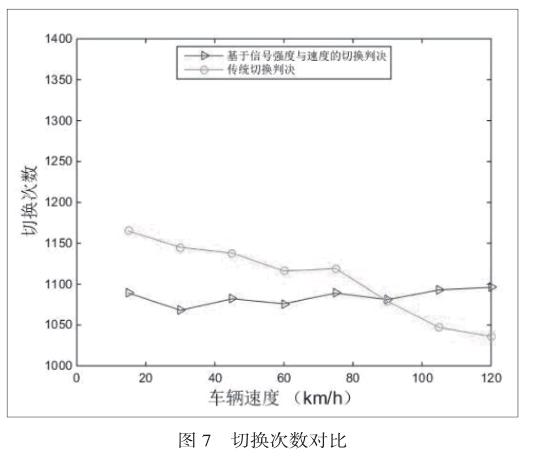
五、总结
为了获得切换更高的准确性和系统的更好性 能,本文提出了基于接收信号强度与车辆速度的切换判决算法。通过GPS辅助,基于速度大小,引入模糊逻辑控制,动态调整迟滞参数,联合信号接收强度引入新的触发切换请求的判断依据,在提高切换成功率的同时避免“乒乓效应”;并且根据车辆速度方向更准确的评估车辆运动趋势,确定目标基站,以及是否切换,避免错误切换次数,减少了切换判决的时间。最后进行了仿真,通过切换成功率以及切换次数两个指标来验证算法的优越性。
参 考 文 献
[1] 王巍. 高速铁路TD-LTE通信系统仿真平台搭建和切换算法研究[D]. 北京邮电大学, 2013.
[2] Luo W, Fang X, Cheng M, et al. An optimized handover trigger scheme in LTE systems for highspeed railway[C]// Signal Design and its Applications in Communications (IWSDA), 2011 Fifth International Workshop on. IEEE, 2011:193-196.
[3] 栾林林. 支持高速切换的 TD-LTE 信令的设计及其优化的研究[D]. 北京: 北京邮电大学, 2013.
[4] 卢立阳. LTE-A 异构网络下基于速度估计的移动性增强算法研究[D]. 北京邮电大学, 2015.
[5] 3GPP TR 36.885 v1.0.0, “Study on LTE-Based V2X Services”; http://www.3gpp.org/ DynaReport/36885.htm).