
直流母线电压可变的混合式步进电机控制策略
2017-04-14 05:53陈光团周扬忠
微特电机 2017年3期
陈光团,周扬忠
(福州大学,福州 350108)
直流母线电压可变的混合式步进电机控制策略
陈光团,周扬忠
(福州大学,福州 350108)
开环控制混合式步进电机在中高速区的负载能力与直流母线电压有关,提高直流母线电压可以提高电机的负载能力。但直接提高直流母线电压会增大混合式步进电机及功率管的损耗,降低驱动系统效率。介绍了一种根据电机负载情况控制直流母线电压的步进电机控制策略。实验结果表明,该控制策略能在保持混合式步进电机最大负载能力的基础上,降低电机损耗,达到负载能力与损耗兼顾的目的。
混合式步进电机;直流母线电压;负载能力
0 引 言
混合式步进电机由于其输出转矩大无累积误差等优点,在速度、位置等控制领域较容易地实现开环控制。但由于混合式步进电机高极对数的结构特点,其定子电流的频率很高,反电动势较大。当电机工作于中高转速时,定子电流无法跟踪给定电流,电机的最大转矩明显减小,电机负载能力下降。提高混合式步进电机的直流母线电压,可以显著提高其负载能力,但它会使得步进电机及功率管的损耗明显增大,电机驱动系统效率明显降低。混合式步进电机在最高直流母线电压下进行开环控制,其效率是很低的[1-2]。为了提高其效率,有人提出了混合式步进电机矢量控制[3-4],它可以提高步进电机的效率,增大电机的调速范围[5];但由于它是闭环控制,增加了系统控制的复杂性,并且需要位置传感器或需要计算工作量较大的状态观测器[6-9],增加了硬件成本。况且由于矢量控制需要留有一定的电压裕度,其负载能力比开环控制略低。
本文提出了一种直流母线电压可变的混合式步进电机控制策略,在至逆变桥的直流母线中间增加一个直流升压斩波(Boost)电路以控制直流母线电压。先计算出步进电机的瞬时输出功率和最大输出功率,并由此控制步进电机的直流母线电压。当负载比较低时,直流母线电压比较低,从而降低损耗。当负载比较高时,直流母线电压比较高,负载能力较大。
1 直流母线电压控制策略
1.1 步进电机输出功率研究
两相混合式步进电机的矢量图如图1所示。图1中A-B坐标系为静止坐标系,d-q坐标系为定向于转子的同步旋转坐标系,m-t坐标系为定向于定子磁链矢量的旋转坐标系。电机采用具有两相绕组电流闭环的微步开环控制策略,两相绕组各采用一个单相逆变桥供电。
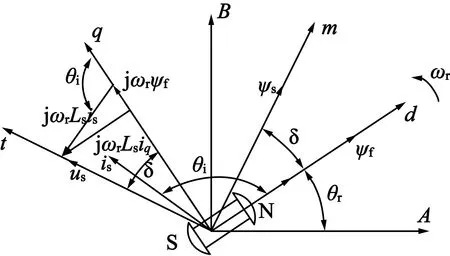
图1 矢量图
对于混合式步进电机,忽略铁耗,其瞬时输出功率:
式中:uA,uB为A,B相瞬时电压,iA,iB为A,B相瞬时电流,Rs为定子电阻。忽略定子电阻以及动态量,可得定子电压稳态平衡方程式如下:
式中:ψf为转子磁链矢量;is为定子电流矢量;us为定子电压矢量。
参照永磁同步电机,忽略凸极效应,两相混合式步进电机的转矩可以表示:
式中:p为电机极对数;|ψf|为转子磁链幅值;iq为定子电流q轴分量。
显然,当iq最大时,输出转矩最大。忽略定子电阻压降时,稳态iq值如下:
式中:Ls为定子电感;ωr为转子旋转的电角速度;δ为d轴与定子磁链矢量ψs的夹角;θi为d轴与定子电流矢量is的夹角。
(1)低速区
当电机处于低速区时,由于绕组反电动势幅值较低,定子绕组电流能够跟踪其给定值。
忽略凸极效应,当定子电流矢量与转子永磁磁链矢量差90°电角度时,iq最大,电机的输出转矩最大。此时电机处于恒转矩状态,其最大转矩:

当电机逐渐提高转速至低速区与中速区的临界转速,且输出最大转矩时,定子电压基波分量幅值为UDC,定子电流恰好能够跟踪其给定值,此临界转速:
(2)高速区
当电机处于高速区时,由于绕组反电动势幅值远高于直流母线电压,定子绕组电流完全不能跟踪其给定值,加在绕组上电压为方波,其基波幅值为1.273 2UDC。由式(4)可得,忽略凸极效应,当定子磁链矢量与转子磁链矢量差90°电角度时,iq最大,电机的输出转矩最大。此时电机处于恒功率状态,其最大转矩:
(3)中速区

因此,混合式步进电机的最大输出功率:
1.2 直流母线电压控制策略


图2 直流母线电压控制策略
2 实验研究
实验的硬件系统框图如图3所示。实验中通过在逆变桥前增加一个Boost电路来实现直流母线电压的控制。实验系统包括交流电压源、Boost电路、以 TMS320F2809型DSP为核心的驱动器、步进电机、计算机、脉冲发生器、示波器、功率分析仪等。在步进电机上同轴安装一个HL9800测功机作为负载。实验中相电流、直流母线电压等数据由驱动器自带的传感器获得,并传送到上位机上。Boost电路输出电压由示波器得到。DSP控制周期为50 μs。Boost电路开关频率为40 kHz,输入直流电压为30 V。Boost电路输出直流电压,即逆变桥直流母线电压采用PI闭环控制,最小值限幅为35 V,最大值限幅为60 V。绕组电流给定幅值为4 A,步进驱动细分数为16。实验中使用的混合式步进电机主要参数:相数为2,步距角1.8°,相电阻0.7Ω,相电感5 mH,转子极对数为50,转子磁链为0.006 Wb。

图3 硬件系统框图
图4是在脉冲发生器输出为10 kHz,即转速为187.5 r/min情况下,由上位机测得的步进电机电流幅值和输出功率波形以及由示波器测得的Boost电路输出的电压波形。由图4可知,此时实际电流能跟踪给定电流,电机处于低速区,随着负载增大,Boost电路输出电压和步进电机相电流幅值均不变,Boost电路输出电压一直维持在最低电压。图5是在脉冲发生器输出为40 kHz,即转速为750 r/min情况下测得的实验波形。此时实际电流不能跟踪给定电流,电机处于高速区,随着负载增大,Boost输出电压增大,并因此使电流幅值增大,提高电机负载能力。
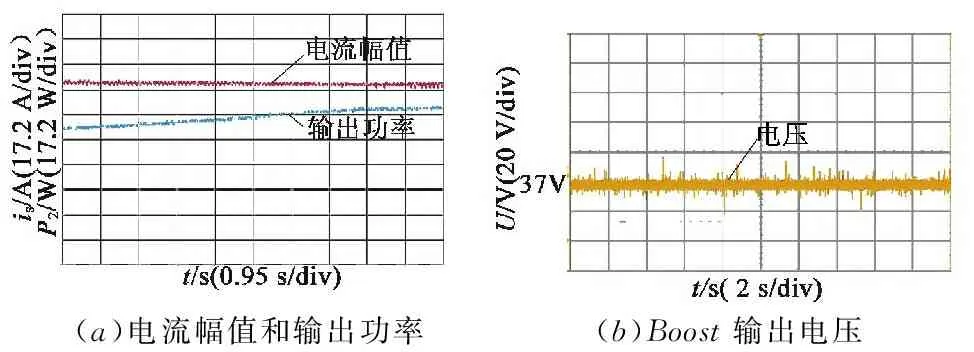
(a)电流幅值和输出功率(b)Boost输出电压
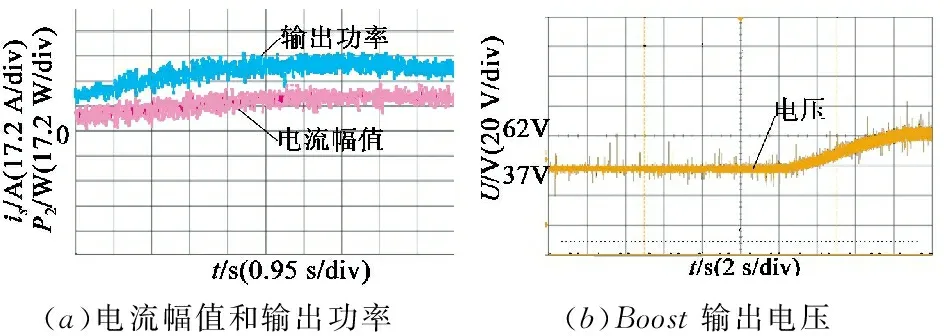
图4 187.5 r/min实验波形
图5 750 r/min实验波形
图6是直流母线分别采用本文所提的变电压控制策略、传统的恒定35 V及60 V直流电压时测功机测得的步进电机最大转矩。由图6可以看出,直流母线电压可变的步进电机,在中高转速区负载能力明显比直流母线电压为35 V的步进电机强。其负载能力与直流母线电压为60 V的步进电机基本相当。
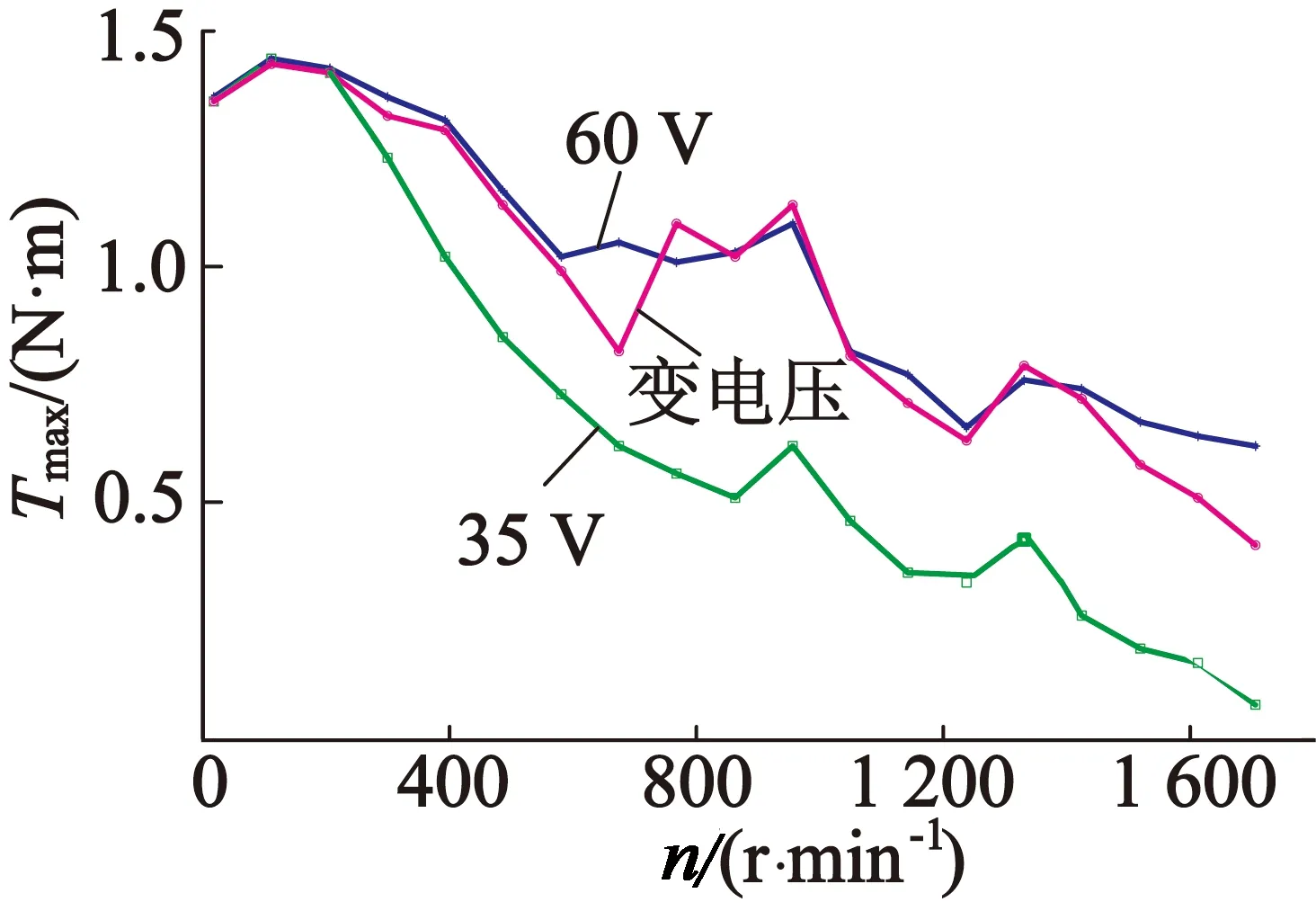
图6 最大转矩曲线
图7是直流母线分别采用本文所提的变电压控制策略、传统的恒定60 V时测得的581 r/min下驱动系统输入功率和Boost输出电压与负载的关系曲线。由图7可以看出,直流母线电压可变的步进电机与直流母线电压为60 V的步进电机相比,在中低负载时直流母线电压较低,其驱动系统损耗明显小得多。

(a)输入功率(b)Boost输出电压
图7 581 r/min下的实验结果
3 结 语
本文根据开环控制步进电机负载能力与直流母线电压的关系,设计了一种根据电机负载情况,调节步进电机直流母线电压的步进电机控制策略。该控制策略能在保持步进电机最大负载能力的情况下,提高步进电机驱动系统的效率。
[1] DERAMMELAERE S,VERVISCH B,COTTYN J,et al.ISO efficiency curves of a two-phase hybrid stepping motor[C]//IEEE Industry Application Socity Annual Meeting,2010:1-5.
[2] DERAMMELAERE S,VERVISCH B,DE BELIE F,et al.The efficiency of hybrid stepping motors:analyzing the impact of control algorithms[J].IEEE Industry Applications Magazine,2014,20(4):50-60.
[3] GAO Hanying,CHENG Shukang,SUN Li,et al.Maximum torque/current control of 2-phase hybrid stepping motor[C]//IEEE International Electric Machines and Drives Conference,2003:1781-1786 .
[4] KIM W,YANG C,CHUNG C C.Design and implementation of simple field-oriented control for permanent magnet stepper motors without DQ transformation[J].IEEE Transactions on Magnetics,2011,47(10):4231-4234.
[5] 钟天云,汤宁平.混合式步进电动机宽调速范围矢量控制策略[J].电力电子技术,2012,46(1):76-78.
[6] BENDJEDIA M,AIT-AMIRAT Y,WALTHER B,et al.Position control of a sensorless stepper motor[J].IEEE Transactions on Power Electronics,2012,27(2):578-587.
[7] BALAKRISHNAN K,UMAMAHESWARI B,LATHA K.Identification of resonance in hybrid stepper motor through measured current dynamics in online for accurate position estimation and control[J].IEEE Transactions on Industrial Informatics,2013,9(2):1056-1063.
[8] DERAMMELAERE S,DEBRUYNE C,BELIE F D,et al.Load angle estimation for two-phase hybrid stepping motors[J].Iet Electric Power Applications,2014,8(7):257-266.
[9] BUTCHER M,MASI A,PICATOSTE R,et al.Hybrid stepper motor electrical model extensions for use in intelligent drives[J].IEEE Transactions on Industrial Electronics,2014,61(2):917-929.
Control Strategy with Variable DC Link Voltage for Hybrid Stepping Motor
CHENGuang-tuan,ZHOUYang-zhong
(Fuzhou University,Fuzhou 350108,China)
The load capacity of hybrid stepping motor with open loop control in middle-speed and high-speed field is associated with the DC link voltage. Increasing the DC link voltage can improve the load capacity of motor. However, increasing the DC link voltage directly will increase the loss of hybrid stepping motor and devices and reduce the efficiency of the driving system. A control strategy of stepping motor was proposed to control the DC link voltage by the load of the motor. The experimental results show that the control strategy can reduce the loss of the hybrid stepping motor on the maximum load capacity so as to gain load capacity and efficiency of the motor to some extent.
hybrid stepping motor; DC link voltage; load capacity
2016-09-23
TM383.6
A
1004-7018(2017)03-0065-04
陈光团(1992-),男,硕士研究生,研究方向为现代调速系统。
猜你喜欢
中国特种设备安全(2022年1期)2022-04-26
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
山东电力高等专科学校学报(2019年5期)2019-11-01
课程教育研究·学法教法研究(2018年20期)2018-08-11
自动化与仪表(2018年7期)2018-07-31
中国设备工程(2017年24期)2017-12-28
