物流搬运站PLC控制系统设计
2017-04-19 09:22贺廉云
时代农机 2017年2期
贺廉云
(德州学院 机电工程学院,山东 德州 253023)
物流搬运站PLC控制系统设计
贺廉云
(德州学院 机电工程学院,山东 德州 253023)
对物流搬运中的搬运站进行研究设计,设计出了以PLC为核心的高效率工作搬运站。主要由一个三自由度的机械手组成,能够按照生产要求,采用西门子S7-200系列PLC对电磁阀进行控制,然后用电磁阀控制气动系统来驱动气缸的运动。实现机械手手指的抓紧与松开、手臂的旋转、手臂的伸长与收缩、整体的上升与下降进而达到搬运站的各种搬运动作,不仅大大减少了劳动力的使用,节约了生产成本,还加快包裹搬运速度,提高了工作效率。
搬运站;机械手;PLC
这些年,伴随着网络商城的兴起,物流行业得到了长足的发展 ,使物流走进千家万户。与此同时,由于物流中存在大量的重复性搬运工作需要投入大量的人力,增加了生产成本,这使工业自动化在其得到了越来越多的应用,搬运站就是其中之一。搬运站,其实质为工业搬运机械手,起到搬运货物的作用,依靠着自动化控制的稳定与灵活特性,活跃于各种物流环节中。
1 搬运站系统
(1)系统概述。本设计中的物流搬运站,其主要由一个三自由度的机械手组成,能够按照工作要求,实现手指的抓紧与松开、手臂的旋转、手臂的伸长与收缩、手臂的上升与下降进而达到物件的搬运动作。大大减少了劳动力的使用,节约了生产成本,加快包裹搬运速度,提高了工作效率。搬运站如图1所示。

图1 搬运站示意图
搬运站的下部是底座,一方面起支撑作用,另一方面可以用来作为控制柜使用;支架使用高强度材料做成,主要起支撑作用,以及固定回转气缸和导杆气缸的作用;回转气缸用来实现旋转动作,其输出转轴与导杆气缸相连,带动导杆气缸旋转;导杆气缸用来实现伸缩运动,导杆气缸与普通气缸相连,普通气缸用来实现上下运动,普通气缸与手指气缸相连,带动手指气缸上下运动;手指气缸实现对物件的抓取与释放动作。回转气缸、导杆气缸、手指气缸都由两个电磁阀控制其运动方式,普通气缸只有一个电磁阀来控制其动作方式。电磁阀统一被PLC来控制其输出,从而实现搬运站复杂的搬运动作。
(2)系统工作过程。本设计中,搬运站原始位置为:普通气缸上升到极限位置,导杆气缸缩回到极限位置,回转气缸旋转到左极限位置,手指气缸松开。搬运站具体运动过程:导杆气缸升出到极限位置→普通气缸下行到极限位置→手指气缸夹持物体→普通气缸上行到上极限位置→导杆气缸缩回→回转气缸旋转到右极限位置→导杆气缸伸出到极限位置→普通气缸下行到下极限位置→手指气缸释放物件,完成搬运工作。在搬运站搬运完工件后,系统再次控制搬运站回到初始位置,等待物件到来的开始指令,重复上述运动,直到接收到停止指令时停止。
2 系统硬件设计
(1)PLC主机的选择。S7-200PLC是德国西门子公司生产的一种小型PLC,因其价格低廉、结构紧凑、指令功能强大、扩展性良好,受到了用户的普遍好评,并成为当代各种中小型控制工程的理想设备。在西门子 S7-200系列 PLC中有CPU221、CPU222、CPU224、CPU226、CPU226XM等。在设计中,使用西门子S7-200系列的PLC来作为搬运站控制系统的控制主机。按照搬运站控制系统的需求,设定了“开始按钮”、“复位按钮”、各种限位开关等12个输入量,及各种电磁阀和信号灯的输出量9个,共需要21个I/O点数,根据I/O点数及程序容量等问题的要求,本控制系统选择CPU226作为主机。
(2)电磁阀。在文章的物流搬运站PLC控制系统中,搬运站的动作是靠气动阀来实现的。搬运站中的回转气缸、导杆气缸、手指气缸都属于双作用气缸,因而每个都需要两个电磁阀来控制气流的输入来控制其运动方向,气缸型号选为DNC-100-400-PPV-A163475。普通气缸则是单作用气缸,因此需要一个电磁阀就能控制其运动,气缸选用型号为SC 80X70,所设计的控制系统为达到搬运动作的需求,共需要7个电磁阀,型号为K25HD2-20 AC 220V。
(3)限位开关。限位开关,是一种利用生产机械中运动部位的部件撞击来发出控制信号的一种低压电器。其主要作用是用来限制运动部件的运动位置或运动程度,使运动部件按照设计要求进行停止、往返、变速等动作。在本物流搬运站PLC控制系统设计中,共有7个限位开关:上升降限位开关、下降限位开关、左旋限位开关、右旋限位开关、内限位开关、外限位开关、抓紧限位开关。限位开关型号为施迈赛牌BM325-r是本控制系统重要的输入量之一,是控制搬运站运动的重要硬件。
(4)接近开关。在物流搬运站PLC控制系统中,为触发搬运站开始搬运工作等任务的需求,在传送带B处安装接近开关型号为WQ-E3K-D3JC。当接近开关检测到物件到来时,系统接收到相应信号,搬运站能够准确的抓取物件。
(5)系统I/O分配及电路设计。控制系统的I/O分配如表1所示,系统接线图如图2所示。

表1 搬运站PLC的I/O分配表
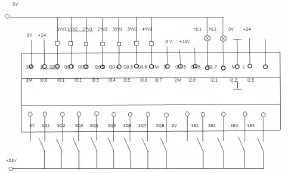
图2 系统接线图
3 系统软件设计
根据物流搬运站PLC控制系统的工作过程设计的顺序功能图如图3所示。
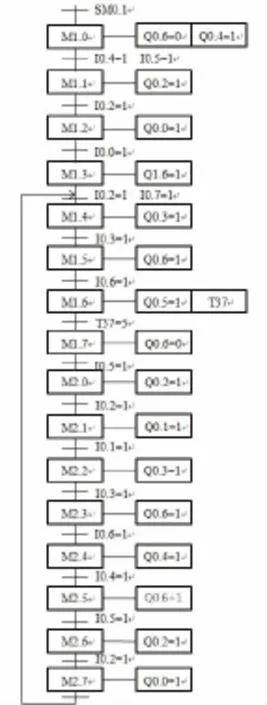
图3 顺序功能流程图
4 系统WinCC仿真
经过WinCC组态设计,运行PLC程序后得到如图4和图5所示的组态动态画面。

图4 WinCC过程监控画面——起始位置

图5 WinCC过程监控画面——搬运物件
5 结语
物流搬运站PLC控制系统中,使用电磁阀来控制搬运站的各种气缸的运动,使用限位开关、接近开关等电器元件对搬运站的运动位置、运动行程进行检测,通过西门子PLC的输入输出指令来统一控制各个电器元件,从而控制气动系统,进而使气缸按照设计要求运动,实现搬运工作。
最后通过WinCC对系统进行仿真设计,使搬运站PLC控制系统设计合理性得到了进一步验证。
[1]孙开敏.机械手控制系统的设计[J].科技信息学报,2012,(2):23-46.
[2]陈恳,刘莉,杨东超.机器人技术与应用[M].北京:清华大学出版社,2012.
[3]赵运婷,贾文民.基于MCGS的机械手控制系统设计[J].机械工程师,2011,(7):14-17.
[4]曹松华.机电系统执行器应用--液压与气动技术[M].北京:中国水利水电出版社,2010.
[5]廖常初.PLC编程及应用第4版[M].北京:机械工业出版社,2014.
[6]李军.WinCC组态技巧与技术问答[M].北京:机械工业出版社,2013.
Design of Control System for PLC Logistics Transportation Station
HE Lian-yun
(School of Mechanical and Electronical Engineering,Dezhou University,Dezhou,Shandong 253023,China)
This paper carries on the research design to the transportation station in the logistics transportation,and has designed the transportation station which takes the PLC as the core and mainly consists of a three degrees of freedom of the manipulator in accordance with the requirements of production,takes SIEMENS S7-200 series PLC solenoid valve to control,and then drive the motion of the cylinder by using the solenoid valve to control the pneumatic system.To achieve the mechanical hand fingers grasp and loosen,arm rotation,arm extension and contraction,the overall rise and fall to achieve a variety of handling station transport action not only greatly reduces the use of labor,saving the cost of production,but also speeds up the handling speed,and improves the efficiency of the work.
transportation station;manipulator;PLC
TP273
A
2095-980X(2017)02-0048-02
2017-01-16
贺廉云(1966-),女,硕士,教授,主要从事模糊控制系统与非线性控制系统的研究工作。
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
橡塑技术与装备(2022年7期)2022-07-06
机械设计与制造工程(2022年1期)2022-02-19
哈尔滨轴承(2020年4期)2020-03-17
模具制造(2019年10期)2020-01-06
制造技术与机床(2018年11期)2018-11-23
猪业科学(2018年4期)2018-05-19
新能源科技(2018年1期)2018-02-17
河北农机(2017年12期)2018-01-20
华北理工大学学报(自然科学版)(2017年4期)2017-11-29