基于SIFT特征的港口内舰船检测方法
2017-04-23 23:37杨光蔚鹏志邓翔
电子技术与软件工程 2017年5期
杨光+蔚鹏志+邓翔
摘 要 全色图像中港口内舰船的快速、准确检测,受地物、云等影响,是一个难点问题。针对这个问题,本文提出了一种基于SIFT特征的港口内舰船检测方法。本文方法与传统方法不同,通过建立港口区域模板,简化SIFT特征点提取方法,通过图像配准快速、准确地定位海水区域。然后,对港口内靠岸舰船使用2D-Otsu和Harris角点结合方法、对水面舰船使用基于异常检测的方法,准确提取感兴趣区域。最后,结合舰船和典型虚警(云、波浪等)的特点,建立CART分类器,有效剔除虚警。实验结果表明,本文提出的港口内舰船检测方法具有较高的舰船检测准确性和效率,并且对于不同尺寸的舰船目标和不同分辨率的图像均具有较好的适应性。
【关键词】舰船检测 模板匹配 SIFT特征 特征提取 特征融合
1 引言
港口内舰船检测是监视特定港口海运交通、获取舰船部署与动态的主要手段,具有重要的研究价值[1-4]。随着遥感成像技术的发展,能够提供丰富细节信息且与人类解译方式相同的全色遥感图像近年来被逐步引入到舰船检测领域[2][5],使得利用全色遥感图像进行港口内舰船检测成为可能。
港口内舰船包括靠岸舰船和水面舰船两类。检测港口内舰船通常包括海陆分割、舰船感兴趣区域提取和虚警排除三个主要阶段。
海陆分割是确定海陆边界,排除地物干扰,保证舰船检测准确性的前提。文献[6]提出了一种基于边界跟踪的海陆分割方法,具有较高的效率,但是分割精度较低,严重影响港口内靠岸舰船检测的准确性。文献[7]依据港口的共性特点,在检测港口的过程中实现海陆分割,具有较好的准确性,但需要准确检测港口。
舰船感兴趣区域提取是舰船检测方法避免漏检的重要阶段。目前,对于港口内舰船感兴趣区域提取方法的研究仅有较少的报道。由于港口内舰船包括背景不同的靠岸舰船和水面舰船两类,因此,文献[8]对上述两类舰船使用不同的方法分别进行感兴趣区域提取,但是该文章研究的主要是大型舰船,对于舰船的普适性不强。文献[9]则提出使用一种基于G0分布的港口内舰船 CFAR 检测方法,能够有效检测靠岸舰船和水面舰船,但是该方法针对的是SAR图像,对于光学图像难以确定有效的阈值。
虚警排除是舰船检测过程中剔除误检的重要步骤。现有舰船检测方法中,大都利用舰船的特点,提取舰船的形状、纹理等特征进行虚警排除[2]。然而,在全色图像中,云、波浪等典型虚警也具有排他性特征。
综上所述,对于港口内舰船检测,目前缺少有效的海陆分割方法,同时对于舰船感兴趣区域提取的普适性方法研究较少,并且忽略了典型虚警(如云、波浪)的特点。因此,本文提出了一种基于模板匹配的港口内舰船检测方法。该方法主要包括以下三个步骤:首先,建立港口区域模板,通过图像配准获取准确的海陆边界;然后,采用2D-Otsu和角点检测结合的方法提取靠岸舰船感兴趣区域,使用基于异常检测的方法提取水面舰船的感兴趣区域;最后,结合舰船的特点和典型虚警(云、波浪等)的特点,建立CART分类器,从而准确检测舰船目标。
2 快速、准确的海陆分割方法
由于现有的海陆分割方法不能满足准确检测靠岸舰船的目的,而通过港口检测提取海水区域的方法难度较大且普适性不高。因此,本文通过与港口区域模板进行配准,准确地检测海陆边界。
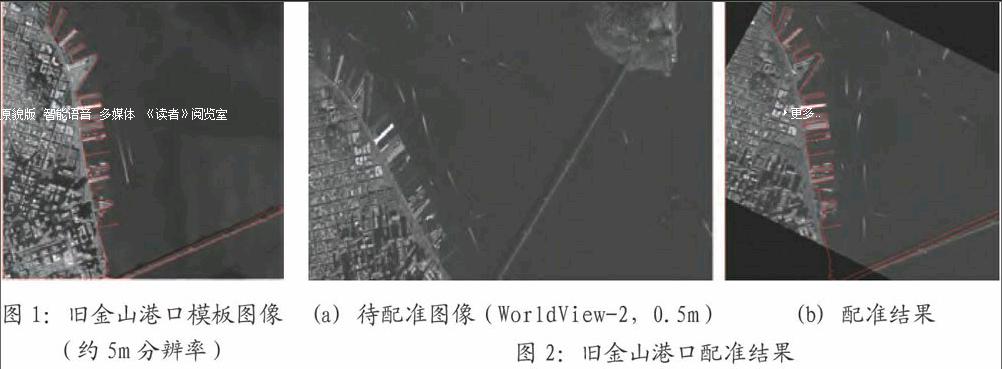
本文对每个港口利用Google Earth的图像分别建立模板,并且人工确定海岸线。图1显示了旧金山港口部分区域的模板图像。
图像配准方法有基于区域的配准、基于特征的配准、基于混合模型的配准和基于物理模型的配准四类[11]。由于待检测图像的分辨率具有多样性,并且模板图像不具有准确的分辨率,同时光学图像受光照的影响较大。因此,本文选择具有缩放、旋转、亮度不变性的SIFT特征[10]对图像进行配准。
2.1 传统SIFT特征点描述方法
文献[10]中提出的SIFT特征向量提取方法首先构建图像高斯金字塔。第一步对图像进行多次下采样,得到N幅下采样图像Ii(i=1,...,N);第二步,利用与尺度因子(σ)相差成固定倍数(σ,21/Mσ,...)的高斯函数组与Ii进行卷积,每个Ii得到M(一般取值3-5)層图像Gt(t=1,...,M);第三步,对于相邻的Gt和Gt+1作差,得到M-1个差值图像Dk(k=1,...,M-1)。
然后,检测SIFT特征点。第一步求取图像Dk中的极值点,并去除低对比度的关键点和不稳定的边缘响应点,得到SIFT特征点;第二步,以特征点为中心,确定其周围16×16的像素窗口作为SIFT特征区域;第三步,对SIFT特征区域的每一个像素点求取梯度幅值与梯度方向。
最后,提取SIFT特征向量。将SIFT特征区域划分为16个4×4大小的子窗口,对每个子窗口计算8个方向(以45度为间隔)的梯度直方图,并得到每个方向的梯度加权值,则一个极值点对应16×8维的特征向量。
2.2 本文中SIFT特征点描述方法
通过对SIFT特征点提取过程的描述可以看出,传统的方法需要对N×(M-1)个图像进行特征点提取,并且要对所有的特征点进行匹配计算,会严重影响数据量较大的全色图像的实时处理。同时,港口区域的高分辨率图像受地物、舰船、云等的影响要高于低分辨率图像,所以提取的SIFT特征点可用性相对不高。此外,全色5m分辨率图像中港口区域的轮廓比较明显(如图1所示)。因此,本文依据港口区域图像的特点,将现有的SIFT特征点提取方法做如下改进。
(1)在对图像进行下采样时,仅取分辨率最接近5m和3m的两个下采样图像I1和I2;
(2)分别对I1和I2进行高斯卷积,建立三层高斯金字塔Gt,依据实验结果,尺度空间取值为σ,21/4,21/2σ;
(3)降低SIFT特征点向量维数,对SIFT特征区域的子窗口计算6个方向(以60度为间隔)的梯度直方图,得到96维特征向量。
2.3 特征点匹配与仿射变换
现有的特征点匹配方法为了实现尺度适应性,对两幅待配准图像的所有特征点均进行两两匹配,最终选取距离最近的点。对于每一个港口,其位置是固定的。因此在特征点匹配过程中,首先利用图像分辨率进行初匹配,对于两幅待配准图像的I1中分辨率相差较大的高斯金字塔不进行处理;然后,对于金字塔的每一层先使用位置信息进行粗匹配,再利用欧式距离对特征点间的相似性进行度量,并使用RANSAC方法去除匹配错误的特征点对,从而获取准确的匹配对。最后,使用文献[10]中介绍的方法进行仿射变换,实现图像配准。
图2显示了旧金山港口区域WorldView-2全色图像与图1中模板进行配准的结果。从图2(b)中可以看出,本文基于配准的方法能够准确获取港口内的海水区域,为后续准确检测舰船提供了保证。
3 舰船感兴趣区域的有效提取方法
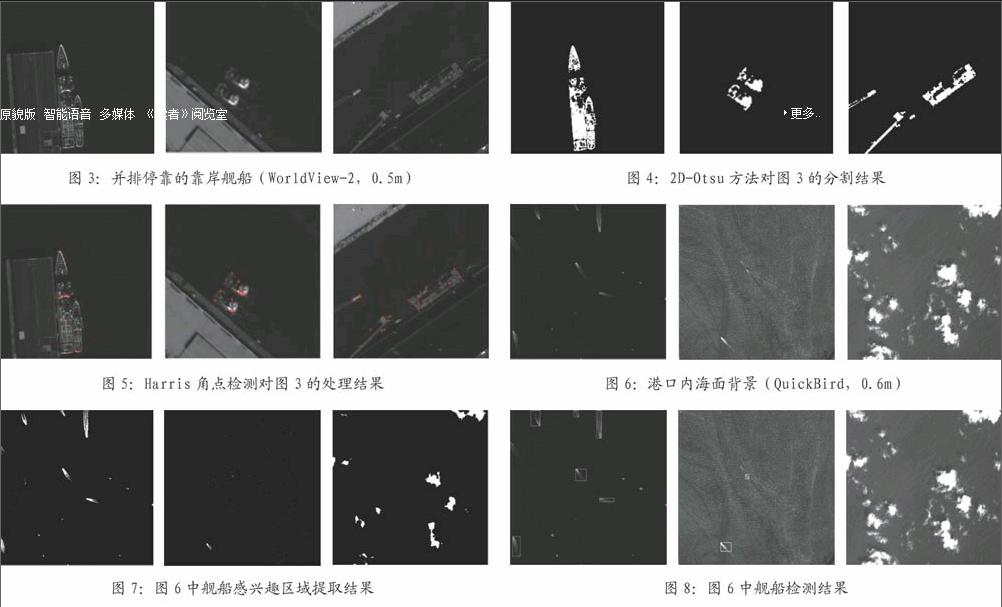
舰船感兴趣区域提取的目的是确定舰船的位置和数量。港口内靠岸舰船分布在海岸线的海水一侧,但是有时会出现并排停靠多个舰船的情形,如图3所示。港口内的水面舰船相互之间有一定的距离,但是出现的位置比较随机。根据第一节提出的方法可以准确定位海岸线,所以靠岸舰船感兴趣区域提取的重点是数量,而水面舰船感兴趣区域提取的重点是位置。因此,本文采用不同的方法提取舰船感兴趣区域。
3.1 2D-Otsu和Harris角点结合的方法
靠岸舰船的海面背景一般比较简单,不会出现大浪等情况。同时,舰船的灰度与周围海水有一定的差异。2D-Otsu方法能够依据灰度,对背景简单的图像进行快速、准确的分割[9]。因此,选用该方法对海岸线的海水一测进行分割,确定舰船的位置,如图4所示。同时,对上述分割得到的感兴趣区域进行简单的长宽比检测,初步确定舰船数量。
受云、阴影等的干扰,在高分辨率图像中使用2D-Otsu方法进行分割,可能使得感兴趣区域的尺寸与实际差异过大,导致确定的舰船数量不准确。所以,引入对光照具有一定稳定性的Harris角点对边缘区域进行检测(检测结果如图5所示)。通过对检测的角点进行凸包计算和线性划分最终获得准确的舰船数量和舰船感兴趣区域。
3.2 基于异常检测的方法
港口内水面舰船的背景有时比较平静(如图6(a)所示),有时受行驶痕迹、云等的干扰比较复杂(如图6(b)、(c)所示)。文献[2]提出了基于背景分析的舰船检测方法,对多种海面背景的图像均能较准确地提取舰船感兴趣区域。因此,本文参考文献[2]的方法提取港口内水面舰船的感兴趣区域。图7显示了图6中的舰船感兴趣区域提取结果。
4 基于CART分类器的虚警排除方法
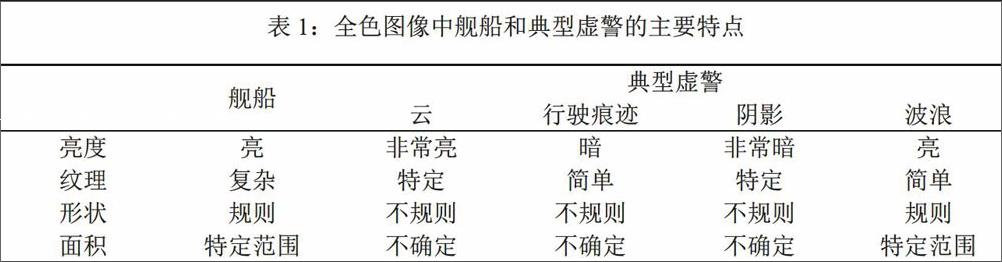
在全色图像中,港口内舰船检测结果中的虚警主要有云、行驶痕迹、阴影、波浪等。表1分析了舰船和典型虚警在全色图像中的主要特点。
从表1可以看出,在虚警排除过程中,可以使用纹理特征排除云虚警,使用灰度特征排除阴影虚警,等等。然而,现有虚警排除方法大都使用舰船的特点构建分类器,忽略了典型虚警的特点。因此,本文综合考虑舰船和典型虚警的特点,使用描述亮度的平均灰度特征,描述纹理的方差、纹理粗糙度、纹理均匀性、对比度和LBP算子,描述形状的长宽比、紧凑性、对称性、偏心率,以及面積特征刻画感兴趣区域。选择易于理解和实现、挖掘出的分类规则准确性高,并且在两分类问题中有较好效果的CART算法构建分类器。图8显示了图6中舰船目标的最终检测结果。
5 实验结果
为了验证本文方法的有效性,在3.4 GHz CPU的计算机上对共包含11个港口的34幅图像进行了测试,检测长度大于50像素的舰船目标。图像数据包括4幅WorldView-2、12幅QuickBird和18幅5m分辨率的SPOT-5全色图像,平均大小为11000×11000像素。针对三个检测步骤,分别进行了如下实验。
5.1 海陆分割有效性实验
本文海陆分割的核心是图像配准,通过对比简化的SIFT特征点描述方法和传统方法,验证该步骤的准确性和实时性。使用均方根误差和计算时间作为配准的评价准则,两者的值越小说明方法的准确性和效率越高。表2显示了对比结果。从对比结果可以看出,本文使用的配准方法在保证配准精度基本相同的情况下,能够将配准速度提高近3倍。
5.2 感兴趣区域提取准确性实验
该实验的主要目的是验证靠岸舰船和水面舰船感兴趣区域提取的准确性。评价标准为检测率和虚警率,检测率越高、虚警率越低说面检测准确性越高,两者的定义如下:
检测率=检测出的正确数目/实际数目,
虚警率=检测出的虚警数目/检测出的总数目。
实验结果如表3所示。从表3可以看出,本文提出的感兴趣区域提取方法的检测率达到了94.91%,仅有19个漏警,说明本文方法具有很高的准确性。
5.3 虚警排除准确性实验
该实验主要是为了验证虚警排除的准确性,即在去除最少目标的情况下删除的虚警越多越好。表4显示本文方法的最终检测结果,尽管误删了7个舰船,但是本文方法去除了88个虚警,虚警率降低了14%。
通过对所有图像数据进行测试,得出本文方法对11000×11000像素图像的平均处理时间仅需1.93分钟
6 结论
本文提出了一种基于SIFT特征的港口内舰船检测方法。该方法使用简化的SIFT特征点向量进行图像配准,快速准确提取海陆边界;依据港口内靠岸舰船和水面舰船的各自特点,分别使用2D-Otsu和Harris角点结合的方法、基于异常检测的方法提取舰船感兴趣区域;结合舰船和典型虚警的特点,使用平均灰度等11个特征建立CART分类器,准确剔除虚警。实验结果表明,该方法的检测准确率达到了93.03%,平均处理时间仅有1.93分钟。同时,该方法能够对多种尺寸的舰船目标进行准确检测,并且适用于多种分辨率图像。因此,本文方法具有很好的准确性、实时性和普适性,相信在港口内舰船实时检测领域,该方法具有广阔的应用前景。
参考文献
[1]陈琪,王娜,陆军等.SAR图像港口区域舰船检测新方法[J].电子与信息学报,2011,33(09):2132-2137.Chen Qi, Wang Na,Lu Jun,et al.A New Method for Ship Detection in Harbor Region of SAR Images[J].Jounal of Electronics & Information Technology,2011,33(09):2132-2137.
[2]Yang Guang,Li Bo,Ji Shufan,Gao Feng, Xu Qizhi.Ship Detection From Optical Satellite Images Based on Sea Surface Analysis[J].IEEE Geoscience and Remote Sensing Letters,2014,11(03):641-645.
[3]李晓博,孙文方,李立.静止轨道遥感卫星海面运动舰船快速检测方法[J].电子与信息学报,2015,37(08):1862-1867.Li Boxiao,Sun Wenfang,Li Li. Ocean Moving Ship Detection Method for Remote Sensing Satellite in Geostationary Orbit[J].Jounal of Electronics & Information Technology,2015,37(08):1862-1867.
[4]Weiya Guo,Xuezhi Xia,Xiaofei Wang. A remote sensing ship recognition method of entropy-based hierarchical discriminant regression[J].Optik - International Journal for Light and Electron Optics,2015,126(20):2300-2307.
[5]Zhu C.,Zhou H.,Wang R.,Guo J..A novel hierarchical method of ship detection from spaceborne optical image based on shape and texture features[J].IEEE Transactions on Geoscience and Remote Sensing,2010,48(09):3446–3456.
[6]李超鹏,杨光.一种基于海陆边界跟踪的快速海陆分割方法[J].计算机科学,2014,41(10):84-86.Li Chaopeng, Yang Guang.Fast Sea-Land Segmentation Method Based on Maritime Boundary Tracking[J]. Computer Science,2014,41(10):84-86.
[7]Francesca Pieralice,Raffaele Proietti,Paola La Valle,et al.An innovative methodological approach in the frame of Marine Strategy Framework Directive:A statistical model based on ship detection SAR data for monitoring programmes[J]. Marine Environmental Research,2014,102:18-35.
[8]Marino Armando,Hajnsek Irena. Ship Detection With TanDEM-X Data Extending the Polarimetric Notch Filter[J].IEEE Geoscience and Remote Sensing Letters,2015,12(10):2160-2164.
[9]Lowe D.G.Distinctive Image Features from Scale-Invariant Keypoints[J]. International Journal of Computer Vision,2004,60(02):91-100.
[10]侯鹏洋,季艳,高峰,等.一种基于SIFT特征的快速逐層遥感图像配准方法[J].遥感技术与应用,2014,29(05):873-877.Hou Pengyang,Ji Yan,Gao Feng,et al.Fast Hierarchical Registration Method for Remote Sensing Image based on SIFT[J].Remote Sensing Technology and Application,2014,29(05):873-877.
猜你喜欢
电子制作(2019年15期)2019-08-27
电子制作(2018年19期)2018-11-14
现代电子技术(2017年16期)2017-09-07
科技资讯(2017年11期)2017-06-09
现代电子技术(2017年7期)2017-04-14
中国生物医学工程学报(2017年6期)2017-02-10
广西科技大学学报(2016年1期)2016-06-22
噪声与振动控制(2015年4期)2015-01-01
轴承(2010年2期)2010-07-28