
虚拟过程控制实验实训平台的开发
2017-04-24 01:49张雅雯
黑龙江工业学院学报(综合版) 2017年4期
周 斌,陈 晶,张雅雯,薛 东
(1.安徽电气工程职业技术学院,安徽 合肥 230051; 2.合肥工业大学 电气与自动化工程学院,安徽 合肥 230009)
虚拟过程控制实验实训平台的开发
周 斌1,2,陈 晶1,2,张雅雯1,薛 东1
(1.安徽电气工程职业技术学院,安徽 合肥 230051; 2.合肥工业大学 电气与自动化工程学院,安徽 合肥 230009)
针对过程控制实验实训物理平台的缺陷,以单回路下水箱液位调节阀控制系统为例,介绍了基于虚拟A3000为控制对象的全虚拟实验实训平台的开发过程。用到DDE通讯,实现了组态王与虚拟A3000对象的数据交换,在组态王工程开发中用命令语言实现了增量式PID算法;用到了OPC通讯,完成了组态王和MATLAB的连接,用Simulink模型文件实现了位置式PID算法。为高校师生开发过程控制工程提供了范例,为开展“教、学、做”的一体化课程提供了平台。
过程控制;组态王;Simulink;增量式PID;位置式PID
过程控制实验实训设备是高等学校给自动化类专业学生,讲解生产过程的工艺流程、自动化仪器仪表的工作原理、控制系统的结构、控制系统的运行过程及控制系统的设计开发等环节的操作平台。[1]219-222也是高等学校教师模拟石油、化工、电力、冶金、轻工、纺织、建材、原子能等工业部门生产环境,开展项目化教学、实践性教学的得力助手。在实践过程中我们发现过程控制的物理设备有以下几个方面的问题:一是体积庞大,一间教室仅能放下为数很少的设备,很多学生不能上手,影响学生学习的参与性;二是使用时间长经过多届学生错误操作等原因仪器仪表老化严重,很多学校又无法及时更新设备,造成教学效果差等不良结果;三是相关物理设备需强电驱动,教师在教学安全性方面很是分心,影响教学。鉴于此,我们开发了基于组态王和虚拟过程对象的全虚拟实验实训平台,以满足教师的教学要求和学生的学习需求。
1 虚拟控制对象的介绍
北京华晟教仪公司开发了基于VB的虚拟A3000过程控制对象软件,与能组态王实现DDE通讯。A3000结构如图1所示。它包括水箱、锅炉、换热器、水泵、大功率加热管和作滞后作用的盘管,传感器方面有温度计、压力计、液位计和流量计,执行器方面有电动调节阀、电磁阀、液位开关、调压模块和变频器。[2]128-130
可以实现对温度、压力、流量、液位等参数的控制。通过选择不同的输水管路,能完成对象特性测试实验,能构建单回路、串级、前馈反馈、比值、解耦和先进控制策略的控制系统。[3]
2 控制系统的构建
这里以单回路下水箱液位系统为例,介绍开发过程。图2展示了单回路下水箱液位系统的结构和原理。
从图2及结合图1可知,单回路下水箱液位系统的工艺过程,可以在虚拟A3000对象上设定为:从电动定速泵出水,经流量变送器FT102,过压力变送器PT101,受电动调节阀FV101节制,进入下水箱,最后回到大储水箱V104,形成循环。控制过程是:通过下水箱液位测量变送器LT103采集信号,将测量结果送入液位控制器,与给定值形成偏差信号,经调节器计算,用以控制电动阀FV101改变下水箱进水流量,实现调节水位的效果。[4]698-700+767

图1 A3000过程对象结构图
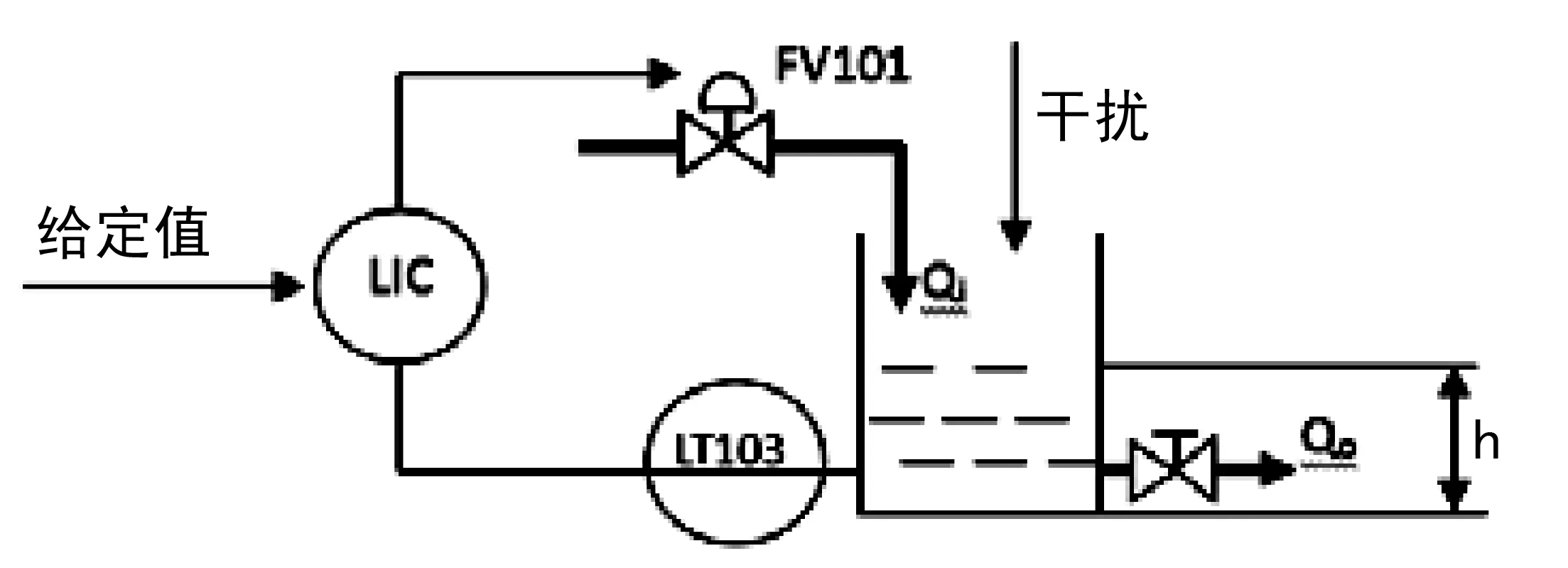
图2 下水箱液位控制系统结构图
3 组态王工程开发
北京亚控公司的组态王是国内主流的组态软件,能完成工业生产过程的监视和控制的任务。该软件具有良好的人机交互界面、丰富的工业图形库及驱动设备库,组态工程步骤简单,易于接受,大致可分为这样几个阶段:设备连接组态、数据库组态、画面组态、动画连接及命令语言编写。[5]
3.1 设备组态
新建工程后,选择设备进入DDE,按照设备配置向导建立DDE设备:连接对象名为“A3000SIMU”,服务程序名为“A3000SIMU”,话题为“A3000”,数据交换方式为标准Windows DDE交换。如图3所示,这样便可使组态王软件和A3000SIMU软件之间进行通讯,完成实时数据采集和实时控制数据输出。
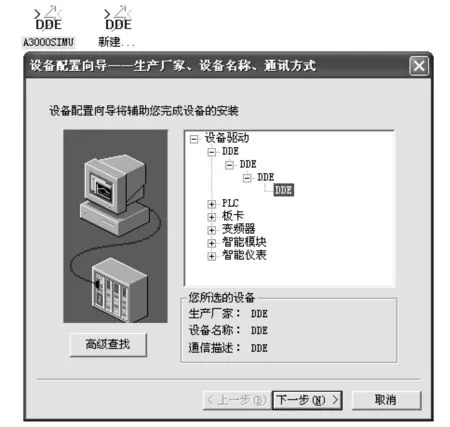
图3 DDE设备组态
3.2 数据库组态
根据之前2中对控制系统的分析:用到的数据有下水箱的液位LT103、电动阀FV101。编写相应的数据变量表1如下:
表1 变量定义表

进入数据词典,双击“新建”,出现“定义变量”窗口,对照表1的变量定义,建立对应的数据变量。输入的IO数据在进入组态软件之前,可以进行工程量转换,如果过程值是液位,则可以设置最大值50,单位厘米。线性转换如式(1):
(1)
Y:输出工程量;Ymax:输出工程量最大值;Ymin:输出工程量最小值;X:输入原始信号;Xmax:输入原始信号最大值;Xmin:输入原始信号最小值。
如果原始输入超过最大原始值,则等于最大原始值;如果少于最小原始值,则等于最小原始值。
3.3 画面组态
按照2中工艺过程,借助组态王的工具箱和图形库绘制画面如图4,让运行维护人员直观地了解工作现场的运行情况,方便及时操作。

图4 组态画面图
3.4 命令语言编写
上述操作过程完成的是现场数据的采集,控制算法方面还未搭建,常用的PID控制规律有两种,即位置式和增量式。考虑到我们的执行设备用的是电动调节阀,建议采用增量式PID。其计算过程如式(2)
(2)
T:为采样周期;k:为采样序号,k=0,1,2,…;e(k):系统在第k次采样时刻的偏差值;e(k-1):系统在第k-1次采样时刻的偏差值;u(k):系统在第k次时控制器的输出;u(k-1):系统在第k-1次时控制器的输出;Kp:比例系数;Ti:积分时间;Td:微分时间;
根据公式(2)编写增量式PID的算法程序如下:
//PID函数 默认采样周期T=1秒
float tempPID_MV;
if( PID_I<1)//最小1秒
PID_I=1;
PID_ET2=PID_ET1;
PID_ET1=PID_ET0;
PID_ ET0=PID_SP-PID_PV;
tempPID_MV=PID_MV+PID_P*(PID_
ET0-PID_ET1);
早期的电气自动化系统称为远程监控系统,是单纯模拟电路的系统,其本身与软件和电缆线无关。因其单独运行无法示警的特性,存在较大隐患不适用于大型系统只能作用于小型系统。因此,电气自动化技术发展出了总线监控系统,且该系统是总和自动化系统更适用于变电站。因其可通过改变电路设计优化系统,从而改变了传统方式中依赖人力监控的模式,能够在无人条件下进行监管,极大程度上节约了人力。电气自动化技术具有安全、全面的监控机制,通过计算机网络随时随地进行监控,同时保证了数据的真实准确避免了人工操作的误差。计算机全天化的工作机制极大地提高了工作效率。
tempPID_MV=tempPID_MV+PID_P/PID
_I*PID_ET0;
tempPID_MV=tempPID_MV+PID_P*PID_D*(PID_ET0+PID_ET2-2*PID_ET1);
IF( tempPID_MV<0)
tempPID_MV=0;
IF( tempPID_MV>100)
tempPID_MV=100;
IF(PID_AM==0)//自动
{
PID_MV=tempPID_MV;//返回去
PID_MAN=tempPID_MV;
}
ELSE//手动
{
PID_MV=PID_MAN;//返回去
}
Trace("PID,PID_MV= %2d",PID_MV);
在组态王应用程序命令语言中加载上述程序即可按增量式PID计算电动调节阀的开度。
4 系统调试
打开虚拟A3000对象软件,设置好仿真接口,使全部信号为4-20mA,选择仿真工艺过程如图5。再进入组态王的工程浏览器,点击VIEW切换到运行系统,利用控制器参数整定的方法,不断试验找到合适的参数,满足水箱水位的性能要求。如图6,水位设定为15厘米(工程百分比为30%)比例系数为1积分时间为20秒时,液位稳定,调节阀稳定。
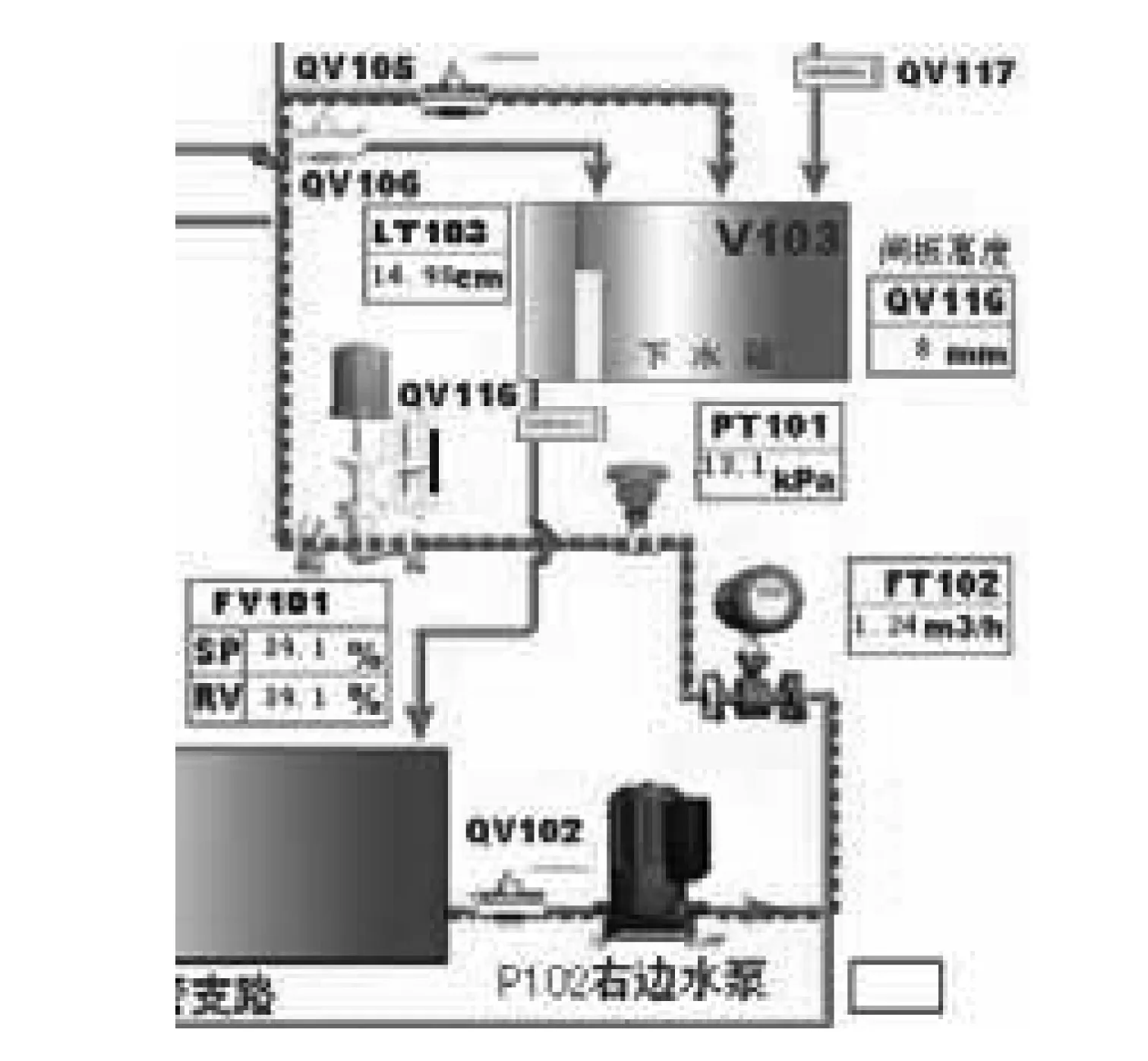
图5 工艺图
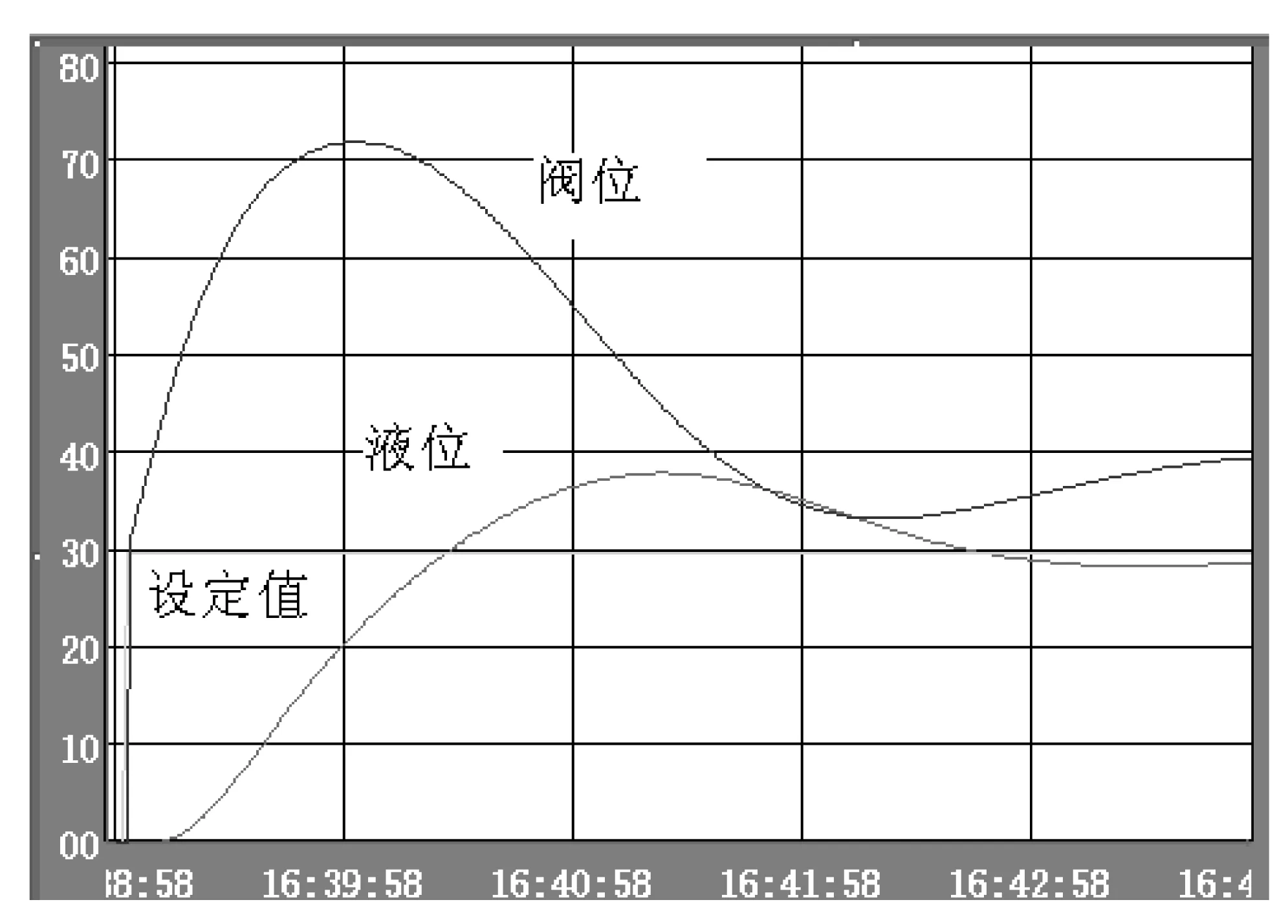
图6 运行曲线
5 Simulink工具箱工程开发
Simulink是控制系统设计的常用仿真工具,能直观、快捷地构建过程控制系统的方块图模型,进行可视化分析,是高校师生、科研人员、工程人员必备的运算软件,是MATLAB的一部分。[6]我们可应用组态王6.53和MATLAB2010的OPC通讯,利用Simulink丰富的工具箱,开发基于各种算法的控制工程,下面以位置式PID算法为例搭建单回路下水箱液位控制系统。
位置式PID的计算表达式如式(3),转化为传递函数为式(4)
(3)
(4)
u(k):系统在第k次时控制器的输出;k:为采样序号,k=0,1,2,…;e(k):系统在第k次采样时刻的偏差值;e(k-1):系统在第k-1次采样时刻的偏差值;Kp:比例系数;Ki:积分系数;Kd:微分系数;D(Z):离散传递函数。[7]168-169
打开MATLAB的Simulink软件,建立model文件,如图7所示。

图7 位置式PID方块图模型
运行组态王工程后,在OPC Config模块中设置连接OPC服务器组态王(KingView.View.1);在OPC Read模块中添加输入信号下水箱水位(LT_103);在OPC Write模块中添加输出信号电动调节阀(FV_101);在Step模块中设置给定值信号(需与组态王中定义变量的工程值相对应),且设置采样周期为1秒;设置Simulink的仿真时间为inf后运行系统,便可更改比例系数Kp、积分系数Ki、微分系数Kd,结合控制器参数整定方法,找到合适的参数,满足液位的性能指标。
6 结论
以虚拟A3000为控制对象,结合组态王可实现计算机直接数字控制系统(DDC),服务“自动控制系统”“过程控制系统”“计算机控制系统”等课程,使得抽象的控制原理控制工程形象化具体化。[8]52-53再通过OPC通讯利用Simulink强大的运算功能和丰富的工具箱,可实现各种先进控制算法的带对象仿真,为老师的教科研和学生实践操作提供平台。
[1]艾红.自动化专业过程控制方向教学与实践探讨[J].实验技术与管理,2014(06).
[2]陈西玉,郑群.PCT系列过程控制系统教学实验装置[J]. 电气电子教学学报,2004(06).
[3]沈逸. 基于ControlLogix平台的串级控制系统的设计和实现[D].上海交通大学,2007.
[4]张立众,马永翔. 锅炉液位PID控制系统的设计[J].化工自动化及仪表,2011(06).
[5]张璇. 组态软件在中密度纤维板调施胶生产中的应用研究[D].东北林业大学,2003.
[6]王正林,郭阳宽.MATLAB/Simulink与过程控制系统仿真(修订版)[M].电子工业出版社,2012.
[7]赵红飞,陆静平,蒋达. 电动汽车用永磁无刷直流电机PID控制器设计及仿真[J]. 中国科技信息,2010(20).
[8]潘海.基于组态王的水箱液位控制系统设计[J]. 科技资讯,2009(26).
Class No.:TP273 Document Mark:A
(责任编辑:宋瑞斌)
Development of Virtual Process control Experiment Training Platform
Zhou Bin1,2,Chen Jing1,2,Zhang Yawen1, Xue Dong1
(1.Anhui Electrical Engineering Professional Technique College, Hefei, Anhui 230051,China; 2.School of Electrical Engineering and Automation, Hefei University of Technology, Hefei, Anhui 230009,China)
Aiming at the defects of physical platform of process control experiment training, taking the control system of water level control valve in single loop as an example, this paper introduces the development process of virtual experiment training platform based on virtual A3000. With DDE communication, the OPC communication and the Kingview and virtual A3000 object data exchange, we achieved the incremental PID algorithm and the connection Kingview an MATLAB. It provides an example for the development of process control engineering and a platform for teaching, learning and doing.
process control ; Kingview; Simulink; incremental PID ; positional PID
周斌,在读硕士,讲师,安徽电气工程职业技术学院。研究方向:自动检测、控制原理。
安徽省高等学校质量工程项目:针对火电厂技能型人才培养的DCS教学系统研究(编号:2016jyxm0076);安徽电气工程职业技术学院科研项目:解耦控制的研究(编号:2015ybxm04)。
1672-6758(2017)04-0070-5
TP273
A
猜你喜欢
仪器仪表用户(2022年11期)2022-11-03
仪器仪表用户(2022年10期)2022-09-29
仪器仪表用户(2022年9期)2022-08-30
仪器仪表用户(2022年4期)2022-04-01
河北农机(2020年10期)2020-12-14
凿岩机械气动工具(2017年2期)2017-07-19
电子制作(2017年23期)2017-02-02
中国教育技术装备(2016年20期)2016-12-12
中国铸造装备与技术(2015年5期)2015-12-10
凿岩机械气动工具(2015年3期)2015-11-11
