
基于虚拟现实的吊装仿真和监控一体化系统设计
2017-04-25 03:46卢阿丽张建德
实验技术与管理 2017年4期
杨 庆, 卢阿丽, 庄 严, 张建德
(南京工程学院 计算机工程学院, 江苏 南京 211167)
基于虚拟现实的吊装仿真和监控一体化系统设计
杨 庆, 卢阿丽, 庄 严, 张建德
(南京工程学院 计算机工程学院, 江苏 南京 211167)
基于虚拟现实的吊装仿真及监控一体化系统以动力学仿真、虚拟现实、半实物仿真和在线监控技术为基础,形成面向重大件吊装过程工艺规划、操作训练、现场监控的一体化系统。介绍了系统的设计结构和功能。该系统可以与各类重型起重设备结合,实现重大件吊装之前的3D过程仿真和工艺规划、虚实结合的吊装操作训练、吊装现场的安全监控和操作指示,使重大件吊装过程更智能、安全和高效。
重大件吊装; 虚拟现实; 仿真实验
仿真计算、虚拟现实、传感器与控制技术的发展,为重大件吊装的工艺规划、操作实验、仿真训练、实物可视化吊装现场监控奠定了技术基础,可以进行吊装操作人员的培训,能够显著提高吊装效率、保障吊装过程的安全性和准确性。
1 吊装仿真研究现状
目前,国内外在起重设备的智能化和自动化研究与应用方面的差距并不大。
在工艺规划方面,先进国家的吊装工艺规划已经普遍使用过程仿真技术,而国内大多采用计算机辅助计算。过程仿真可得到更详尽的吊装过程和更精确的吊装结果,据此制定的工艺与现场真实情况更贴近、工艺内容更加细致、更具有可用性。文献[1-2]研究了3D图形环境中吊装过程动作仿真与路径规划问题,将大型吊装仿真系统用于重大件吊装过程的路径规划、动作仿真和关键部件的强度校核;文献[3]基于相似的思路研究了吊装三维虚拟仿真系统。近年来,一些交通运输专业院校、研究机构或企业也进行了吊装仿真和工艺规划方面的研究或技术开发[4-6]。例如武昌造船厂对海洋平台工作船罐舱吊装作业,采用三维几何过程仿真的方法实现了工艺过程虚拟仿真[7]。
在针对性的操作训练方面,国内对于复杂环境的重大件吊装几乎没有操作训练,国外却大量使用与起重设备配套的模拟器,但基于真实吊装环境、具有3D场景的高度仿真训练也处于起步状态。
在吊装现场管控方面,国内外都需依靠现场操作、指挥、安全等人员之间的协调,将模糊控制方法[8-10]、自适应逆推算法[11]、非线性随机控制方法[12]用于辅助监控的传感器和测量装置。
2 吊装仿真和监控一体化系统结构
基于虚拟现实的吊装仿真及监控一体化系统与各类重型起重设备结合,实现了重大件吊装之前的3D过程仿真和工艺规划、虚实结合的吊装操作训练、吊装现场的安全监控和操作指示。应用该系统,可以提高重大件吊装过程的安全性、操作效率和操作精确性。系统结构如图1所示。

图1 吊装仿真和监控一体化系统结构
2.1 吊装过程仿真与工艺规划子系统
吊装过程仿真与工艺规划子系统基于过程规划、动力学计算和3D可视化仿真,可以在3D环境中设置吊点、规划被吊物的运动轨迹和速度等,系统根据规划进行吊装过程仿真,仿真过程中计算任意时刻的动力学效应(钢绳受力、起重机受力、重物质心轨迹、重物速度/加速度等),最后自动生成吊装工艺方案文件。
吊装过程仿真与规划子系统的主要功能模块包括起重机建模、被吊物定义、3D吊装场景设置、吊装路径与时间规划、吊装过程仿真计算、吊装过程的3D可视化仿真、吊装过程性能分析、吊装数据管理(见图2)。
起重机建模功能模块允许用户根据起重机类型和机构参数,快速定制起重机设备模型(含钢绳和吊钩模型)并存入数据库。
被吊物定义模块用于指定一个或多个被吊物、设置吊点位置、计算质心和惯性矩等动力学属性。

图2 吊装过程规划与仿真系统模块
吊装场景设置模块用于按照真实吊装环境布置3D模型、设置风速、风向、天气与时间条件等。
吊装过程规划模块用于设置起重机的运动或钢绳上吊点的运动轨迹和速度。
吊装过程仿真计算模块可根据吊装规划数据进行全程动力学计算,获得任意时刻的动力学指标(钢绳受力、起重设备受力、被吊物速度/加速度、质心位置/速度/加速度、干涉与碰撞情况等)。
吊装过程3D可视化仿真可根据动力学计算结果,在3D吊装环境中再现全部吊装过程。
2.2 虚实结合的吊装操作仿真训练子系统
操作仿真训练子系统用于在确定吊装工艺之后的操作培训。由于重大件吊装的对象特殊、环境多样,通常无法在事前进行反复训练。而纯虚拟环境中的操作训练与真实操作的感觉相差很大。虚实结合的吊装过程操作仿真训练是半实物仿真训练,其特点是用户的操作界面与真实的起重机完全相同,包括所有的操纵杆、座椅、脚踏,以及各种旋钮、按钮、开关等。吊装场景采用3D虚拟方式,完全按照预定的真实环境和真实吊装对象来设置。
用户佩戴立体眼镜,在实物的模拟器中进行仿真训练。用户的所有操作都转换成电信号输入仿真控制软件,软件根据用户操作信号来驱动虚拟起重机;后台进行动力学实时计算得到吊装效果并在3D虚拟环境中显示出来。由于采用实时交互和3D立体显示,用户具有很好的临场感和操作手感,因此可以获得良好的训练效果。仿真控制软件主要包括4个功能模块,其技术原理如图3所示。

图3 吊装操作半实物仿真模拟器技术原理图
场景设置:用于布置吊装环境、设置吊装设备和被吊重大件。
硬件管理:用于连接模拟器硬件,并处理操作信号和反馈信号。
操作仿真:根据用户操作产生吊装结果,并在3D环境中显示、输出到相关硬件执行装置。
结果评估:根据吊装计算结果,评估操作的合理性,包括操作的稳定性、定位精度、是否有碰撞、钢绳受力大小、是否有冲击等。
2.3 吊装现场在线可视化监控子系统
吊装现场监控子系统基于在线数据测量、虚/实场景同步的实时、可视化监控,实现3D虚拟场景与真实场景一一对应;在线获取起重设备位姿、被吊物位姿、其他运动物体位姿、风速、风向等信息,使虚/实场景同步;进行下一时段危险预测计算和最优控制参数计算,以保证完全性和合理操作。
吊装现场监控子系统的主要功能模块如图4所示。
初始场景设置:根据真实吊装环境设置3D虚拟环境;根据起重机初始状态设置虚拟起重机初始状态;设置被吊物初始位置与姿态等。
硬件管理与设置:各种传感器和数据采集与传输装置的自检和初始化。

图4 吊装现场监控子系统技术原理图
信号处理:传感器及数据采集的信号传输与预处理;反馈信号的处理与传输。
危险预测计算:根据输入信号和上一时刻的状态进行下一设定时段的动力学计算,判断是否存在危险,若存在危险则立刻传输给操作者或起重设备。
操控信号计算:根据下一时段的预定目标(被吊物位姿、速度等),计算起重设备的运动参数,再转换成操作参数,传输给操作者或起重设备。
结果输出与反馈:在控制端的3D场景中显示危险信号或相关参数;将可能的危险信号和最优操作参数传输给操作者或起重设备。
系统实时获取当前吊装设备和被吊物的位姿、钢绳受力等信息,结合预先设置的与真实场景一一对应的虚拟场景进行动力学实时计算,预测将要发生的危险(如碰撞、受力过大等),并可以根据预定目标反算起重设备的最佳操作参数,从而保证吊装作业的安全性,提高操作精度和吊装作业效率。
3 吊装仿真模拟器
研制了开放式、半封闭式和全封闭式吊装仿真训练模拟器,以适应于不同类型起重机的模拟操作训练(见图5)。起重机操控装置可根据实际起重机定制。
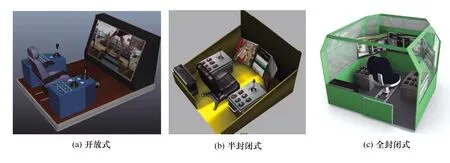
图5 吊装操作仿真模拟器
4 结语
通过将先进的软件、物联网、传感器、虚拟现实、在线反馈控制、3D可视化交互等技术进行有效集成,构建了一个基于虚拟现实的吊装过程规划、训练、监控一体化系统,使重大件吊装过程更智能,更安全、更高效。吊装仿真及监控一体化系统将在复杂工程或设备安装、大型构件对接等方面有广泛的应用。
References)
[1] 林远山,王欣,吴迪,等.移动式起重机吊装路径规划仿真平台设计[J].计算机工程与应用,2012,48(24):231-235.
[2] 林远山,郑亚辉,梁友国,等.面向大型吊装的三维仿真系统[J].中国工程机械学报,2010,8(2):238-243.
[3] 杨煦斌,王欣,孔维东,等.面向吊装的三维虚拟仿真系统设计与实现[J].石油化工建设,2008,30(1):43-47.
[4] 刘新根.钢管混凝土拱桥拱肋吊装及注浆力学仿真分析[J].世界桥梁,2014,42(4):59-63.
[5] 岳玉洁,赵建国.基于Inventor三维吊装仿真系统的研究与应用[J].机械设计与制造,2012(4):73-75.
[6] 吴芝亮,章青.浮式起重船吊装过程的计算机仿真[J].中国海上油气,2002,14(5):56-59.
[7] 严睿,杨海.海洋平台工作船罐舱吊装工艺虚拟仿真[J].管理与技术,2009(1):14-17.
[8] Moustafa K A F,Ismail M I S,Gad E H,et al. Fuzzy control of flexible cable overhead cranes with load hoisting[J].Transactions of the Institute of Measurement and Control,2006,28(4):371-386.
[9] Trabia M B,Renno J M,Moustafa K A F. A general anti-swing fuzzy controller for an overhead crane with hoisting[C]//IEEE International Conference on Fuzzy Systems. 2006:627-634.
[10] Park M S,Chwa D,Hong S K. Adaptive fuzzy nonlinear anti-sway trajectory tracking control of uncertain overhead cranes with high-speed load hoisting motion[C]//International Conference on Control,Automation and Systems.2007:2886-2891.
[11] Cao Lingzhi,Wang Hongwei,Niu Chao. Adaptive backstepping control of crane hoisting system[C]//2007 2nd International Conference on Bio-Inspired Computing: Theories and Applications(BICTA 2007). 2007:245-248.
[12] Rapp C,Kreuzer E,Namachchivaya N S. Reduced normal forms for nonlinear control of underactuated hoisting systems[J].Archive of Applied Mechanics,2012,82(3):297-315.
Design of hoisting simulation and monitoring integrated system based on virtual reality
Yang Qing, Lu Ali, Zhuang Yan, Zhang Jiande
(Department of Computer Engineering,Nanjing Institute of Technology,Nanjing 211167,China)
The hoisting simulation and monitoring integrated system is based on dynamics simulation, virtual reality,semi-physical simulation and on-line supervision and control. It is used for Hoisting process planning, operation training and on-site monitoring. The design structure and function of the system are introduced. The system can be combined with all kinds of hoisting equipment,to achieve 3D process simulation and process planning,hoisting operation training,hoisting safety monitoring and operating instructions on site. The system can make hoisting more intelligent,safe and efficient.
heavy hoisting; virtual reality; simulation experiment
10.16791/j.cnki.sjg.2017.04.027
2016-11-30 修改日期:2016-12-09
国家自然科学基金项目(61403188);江苏省产学研项目(BY2016008-02);江苏省自然科学基金项目(BK20150731);南京工程学院教学研究项目(2014ZD01,2014ZC22,2014ZC25,JG201409);南京工程学院创新基金重大项目(CKJA201506,CKJA201306);南京工程学院人才启动项目(YKJ201324)
杨庆(1976—),女,上海,硕士,副教授,主要研究方向为虚拟仿真、图形图像.
TP391.9
A
1002-4956(2017)4-0108-04
猜你喜欢
中国特种设备安全(2018年10期)2018-12-18
石油化工建设(2018年2期)2018-07-11
石油化工建设(2018年2期)2018-07-11
石油化工建设(2017年5期)2018-01-26
汉语世界(2017年3期)2017-06-05
商周刊(2017年24期)2017-02-02
海外星云(2016年7期)2016-12-01
船舶标准化工程师(2015年5期)2015-12-03
石油化工建设(2015年4期)2015-12-01
筑路机械与施工机械化(2014年4期)2014-03-01
